
Fターム[3C007ES17]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 載置するもの (126)
Fターム[3C007ES17]に分類される特許
21 - 40 / 126
基板搬送用ロボットアームのフォーク構造
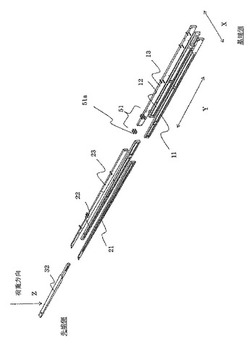
【課題】基板搬送用ロボットのハンド部のフォークに対して要求される耐熱性要求、剛性要求、軽量化要求を満たすと共に、長尺化要求をも満たすフォーク構造を提供する。
【解決手段】基板に薄膜処理を施す際に使用する基板を搬送するロボットのハンド部に使用されるフォーク構造において、幅方向に複数枚の板状部材11,12,13を連ね、当該連ねられた複数枚の板状部材を長手方向に複数段継ないだ梁状構造物をなし、当該連ねられた複数枚の板状部材を長手方向に継ぐ位置において、基端側の複数枚の板状部材と先端側の複数枚の板状部材が互い違いに重なり合っており、当該複数の板状部材が互い違いに重なり合っている部位の少なくとも2箇所において、複数個のボルト・ナット51a等による機械的な締結部品や凹凸面の嵌合によるせん断荷重伝達手段51を設けた構成のフォーク構造とした。
(もっと読む)
エッジグリップ装置、及びそれを備えるロボット。

【課題】 半導体プロセス用ウエハを把持した後、素早く移動させることができるエッジグリップ装置を提供する。
【解決手段】 チャックハンド1は、半導体プロセス用ウエハ3をフロントガイド12に向かって押圧して半導体プロセス用ウエハ3を把持するプッシャー25を有する押圧機構14を備えている。押圧機構14は、プッシャー支持体22と、緩衝部材28とを更に有している。プッシャー支持体22は、進退できるよう構成され、前後にスライドできるようにプッシャー25に設けられている。プッシャー支持体22は、その前方に隙間26aがあいている。隙間26aには、反発力が小さく弾性変形可能な緩衝部材28が介在している。プッシャー支持体22は、前進すると、緩衝部材28を介してプッシャー25を押されて前方に移動させる。プッシャー25は、半導体プロセス用ウエハ3に当たって押し付けられる。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
搬送アームの洗浄方法、基板処理装置の洗浄方法及び基板処理装置
【課題】搬送アームに付着しているコンタミを除去する基板処理装置の制御方法を提供する。
【解決手段】基板の搬送を行うための静電チャックを有する搬送アームの洗浄方法であって、前記搬送アームに帯電している異物が付着している場合において、前記搬送アームに前記基板が載置されていない状態で、前記静電チャックの電極の各々に帯電している異物の電荷の極性と同じ極性の電圧を印加する電圧印加工程を有し、前記搬送アームに付着している異物を除去することを特徴とする搬送アームの洗浄方法を提供することにより上記課題を解決する。
(もっと読む)
救助ロボット
【課題】簡単な構造で、要救助者を確実かつ円滑に救助し、救出時間の短縮を図る。
【解決手段】救助ロボットは2機のクローラ5、6にそれぞれ、2台のコンベア8、9が分割配置され、要救助者の救出に際して、前側のコンベア8をクローラ5の進行方向前方の走行面に向けて前進傾動させ、各クローラ5、6の低速の前進走行とともに各コンベア8、9を各クローラの走行方向とは反対方向に各クローラの走行速度と同期させて回転駆動し、前側のコンベア8の先端を要救助者が居る地点の要救助者の接触面と要救助者の身体との間に潜り込ませて当該要救助者を前後の各コンベア8、9上に引き上げ収容する。
(もっと読む)
ウェーハ搬送装置及びウェーハ搬送方法
【課題】本発明の目的は、ウェーハ収納用カセット内に載置されているウェーハの載置位置がずれている場合であっても、容易に、ウェーハの位置を修正し、ウェーハを保持・搬送できるウェーハ搬送装置及び方法を提供することにある。
【解決手段】ロボットハンド10が、ウェーハ下方の空間32内を水平移動可能でかつ、水平移動時に保持すべきウェーハ20の周縁部の高さ位置HWよりも大きな高さ寸法HYをもつウェーハ位置調整手段13とを有することを特徴とする。
(もっと読む)
基板保持部材、基板搬送装置、基板搬送方法、ステージ装置、露光装置及びデバイス製造方法
【課題】基板の変形を抑えて基板の受け渡しができること。
【解決手段】基板を保持し、支持部によって支持される基板保持部材であって、前記基板が載置される載置面を有する基板載置部と、前記基板載置部と一体的に設けられ、前記載置面を含む面内に位置する所定軸を中心として前記基板載置部が回転可能なように前記支持部によって支持される被支持部とを備える。
(もっと読む)
ロボット及び物品搬送システム
【課題】機能を維持しながらもより小型化することができるようにした、ロボット及び物品搬送システムを提供する。
【解決手段】アーム部材23と、アーム部材23を揺動させるアクチュエータ22と、アーム部材23の先端に設けられるハンド部材24と、アーム部材23とハンド部材24とを回転可能に連結する関節部材と、アクチュエータ22を支持し直線駆動するリニアアクチュエータ3と、アクチュエータ22及びリニアアクチュエータ3を協働させての各ハンド部材を進退方向に直線移動させるコントローラとを有して構成する。
(もっと読む)
基板保持部材、基板搬送アーム及び基板搬送装置
【課題】磨耗量低減、汚染防止、アライメント精度向上、又は飛び出し防止の機能を備えた基板保持部材、基板搬送アーム及び基板搬送装置を提供する。
【解決手段】基板搬送装置の基板搬送アームに取り付けられ、基板の周縁を載置して基板を保持する基板保持部材4であって、基板の裏面に当接して基板を保持する裏面保持部5と、基板の端面に当接する端面当接部6とを有する。端面当接部6は、R形状を有し、基板の端面に当接して基板のずれを規制するR形状部8と、R形状部8の上方側に設けられ、庇状に形成されたオーバーハング部81とを含む。
(もっと読む)
基板搬送装置及び基板処理装置
【課題】搬送中に基板の位置ずれを生じにくく、且つ、パーティクルの発生を抑制可能な基板搬送装置及びこれを備えた基板処理装置を提供する。
【解決手段】基板搬送装置は、基板Wを保持して水平方向に移動可能な保持部材10を備え、この保持部材10は基板Wの下面側の周縁部を保持するために基板Wの載置領域の周方向に沿って複数設けられ、垂直方向の断面が円弧状の凹曲面である保持面13、14を備えている。
(もっと読む)
吸着搬送部材およびこれを用いた基板搬送装置
【課題】 基板を吸着して搬送する際に基板にパーティクルが付着しにくい吸着搬送部材およびこれを用いた基板搬送装置ならびにこの基板搬送装置を用いた基板処理装置および基板検査装置を提供する。
【解決手段】 先端側が二股に分岐した、支持部側から先端側に向けて長い板状体7に、板状体7の先端部の各表面の少なくとも2カ所に設けられた、気体を吸引して基板を吸着するための吸着部3と、分岐部を通って先端部の吸着部3同士をつなぐ先端側吸引路4aと、支持部に設けられた、分岐部における先端側吸引路4aに支持部側吸引路4bを介してつながって気体を吸引するための吸引部5とを備え、先端側吸引路4aが、先端部側で直線状であり、分岐部側で湾曲している吸着搬送部材1において、先端側吸引路4aの板状体7の長手方向における長さは、湾曲している部分の方が直線状の部分よりも長い吸着搬送部材1である。
(もっと読む)
ガラス基板搬送用ロボットハンド
【課題】安価でメンテナンスが容易なガラス基板搬送用ロボットハンドを提供する。
【解決手段】櫛歯状の本体に平面状にガラス基板保持部を配置し、ガラス基板保持部上にガラス基板を載置してガラス基板を搬送するロボットハンドにおいて、ガラス基板保持部にOリングの半径方向をガラス基板と垂直になるようにOリングを配置し、Oリングを円周方向に回転させる回転機構と、Oリングを回転させた位置で固定する固定機構とを有し、Oリングの外周面をガラス基板と接触させてガラス基板とOリングの外周面の間の摩擦力によりガラス基板を保持して搬送することを特徴とするガラス基板搬送用ロボットハンド。
(もっと読む)
ワーク搬送装置
【課題】輻射熱を受けやすい部材から効率よく熱を逃すことができるワーク搬送装置を提供する。
【解決手段】ワークを搬送するためのワーク搬送機構を備えたワーク搬送装置であって、ワーク搬送機構の外表面各所には、冷媒循環用の冷却パイプ84が付設されており、冷却パイプ84は、上記外表面に対して弾性部材85を挟んだ状態で固定具86を介して押圧固定されている。
(もっと読む)
基板移載装置
【課題】本発明は、基板の高速移送時に生じる風によって、基板表面に塗布された塗膜に発生する塗膜の変形、波打ち等の塗膜欠陥や、さらには塗膜表面への異物付着を低減する手段を備えた基板移載装置を提供することを課題とするものである。
【解決手段】基板を積載保持するハンド部を有する基板移載装置であって、ハンド部に積載した基板を上から覆う風拡散板を有し、該風拡散板は一端部がハンド部の付け根部分に固定されていることを特徴とする基板移載装置。
(もっと読む)
基板搬送装置、基板検査装置、及び、基板搬送方法
【課題】基板搬送装置、基板検査装置及び基板搬送方法において、基板との不要な接触を防ぐ。
【解決手段】ウエハ搬送装置1は、ウエハWが載置されるウエハ載置面2a,3aを有し互いに平行に設置された2本のアーム部2,3と、ウエハ載置面2a,3a(アーム部2,3)をアーム部2,3の長手方向を回動軸A2,A3として水平面に対し傾斜させる傾斜手段としてのバランサ(錘)4,5と、アーム支持部6と、吸引用チューブとしてのアーム側吸引用チューブ7,8と、支持部側吸引用チューブ9と、傾き検出手段としての透過型センサ10,11と、を備える。
(もっと読む)
搬送装置、搬送方法、露光装置、及びデバイス製造方法
【課題】載置ずれや変形を生じさせることなく、基板保持部に基板を受け渡すこと。
【解決手段】基板Pを保持する基板保持部としてのプレートホルダ9に基板Pを搬送する搬送装置は、基板Pを支持する支持装置としての搬送ハンド12と、搬送ハンド12を駆動し、プレートホルダ9からの搬送ハンド12の一部の高さと他部の高さとを相対的に変化させ、かつその一部の高さ及び他部の高さを減少させて、搬送ハンド12が支持する基板Pをプレートホルダ9に受け渡す駆動装置13,14と、を備える。
(もっと読む)
試料位置検知端部エフェクタおよびその使用方法
【課題】ウエハの引っ掻き傷や粒子による汚損を最少にして半導体ウエハを確実に移送し得る試料把持用端部エフェクタを提供すること。
【解決手段】光源、及び受光部に作動するように連結された本体を有する端部エフェクタを設け、前記光源、及び受光部は離間するそれぞれの光源光路開口、及び受光路開口を有し、これ等開口の間に光透過路に沿って光ビームが伝搬し、これ等光ビームが既知のビーム形状であるように前記光源光路開口、及び受光路開口の寸法を定め、前記試料と本体との空間を狭くするため、これ等試料と本体との間の相対運動を与え、前記相対運動を与えることに組み合わせて、前記光透過路に交差するように前記試料を位置決めする。
(もっと読む)
物体を狭持する人工ハンドの指構造及び物体の人工ハンド狭持方法
【課題】様々な形状の物体、特に床面等に密着した紙等の薄い物ならびにクリップ等の小さく且つ端面が曲面である物を安定性良く把持することが可能で、簡単な構成要素の人工ハンドの指構造と人工ハンド狭持方法を提供すること。
【解決手段】二本の指の少なくとも一方の指を動かして平面に載置された物体を狭持する人工ハンドの指構造であって、前記一方の指1は、前記物体に当接される先端部に前記物体を掬い上げる凹曲面部12を持ち、他方の指2は、前記物体に当接される先端部に前記物体を押圧する凸曲面部22を持つ、ことを特徴とする。
(もっと読む)
サンルーフユニット把持装置およびサンルーフユニット把持方法
【課題】汎用性の高いサンルーフユニット把持装置を提供すること。
【解決手段】搬送ハンド10は、略U字形状のメインフレーム31と、このメインフレーム31のうち互いに略平行に延びる部分同士を連結するセンターフレーム33と、を有するサンルーフ部材3を把持する。搬送ハンド10は、センターフレーム33の下面が着座するセンターフレーム着座部132と、メインフレーム31のうちセンターフレーム33に略平行な部分の下面が着座するメインフレーム着座部125と、メインフレーム31のうち互いに略平行に延びる部分を、内側の側面から押圧する一対の押圧部62A、62Bと、を備える。
(もっと読む)
搬送用治具
【課題】炭素繊維強化樹脂複合材を用いて、その利点を生かしながら、パーティクル発生を抑制し、清浄環境下での基板等を搬送する用途に十分適した搬送用治具を提供する。
【解決手段】複数枚の繊維強化プリプレグシート4aを積層した積層板4を加工してなり、板状物を搬送する搬送装置において板状物を直接接触して保持することができる搬送用治具であって、積層板4の表面に静電消失層5が形成され、積層板4の加工端面に端面保護層6を形成した搬送用治具1。
(もっと読む)
21 - 40 / 126
[ Back to top ]