
Fターム[3C007EU01]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | ネジ式 (87)
Fターム[3C007EU01]に分類される特許
1 - 20 / 87
ハンドおよびロボット
【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
ワークピッキングシステム

【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボットハンド
【課題】把持ストロークを可変にしつつ、軽量化かつ小型化できるロボットハンドを提供する。
【解決手段】ワークを把持するロボットハンド10であって、水平方向に配置されるサーボモータ21と、鉛直軸Pを中心とする平面視における仮想円Rの円周上に配置される複数のツメ60と、サーボモータ21の水平軸周りの回転を、鉛直軸P周りの回転に変換する第1変換機構30と、鉛直軸P周りの回転を、鉛直軸P方向の直線移動に変換する第2変換機構40と、鉛直軸P方向の直線移動を、仮想円Rの径方向Dの直線移動に変換する第3変換機構50と、を具備し、ツメ60は、第3変換機構50によって、仮想円Rの径方向Dに移動する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
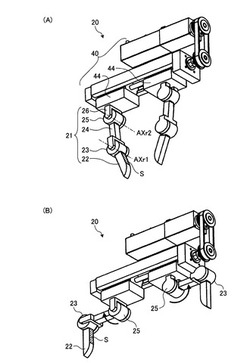
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
搬送ロボット
【課題】ワークを搬送するときの位置決め精度を確保することができると共に、ワーク運搬用箱を搬送する際にエンドエフェクタに対して作用するモーメント荷重をほとんどなくすことができ、エンドエフェクタに必要とされる許容モーメントを小さくすることができる搬送ロボットを提供すること。
【解決手段】搬送ロボット1は、把持部5によってワークを把持するときには、ロック機構部6によってバランスハンド部4を原位置に固定してエンドエフェクタ21を移動させるよう構成してある。搬送ロボット1は、把持部5によってワーク運搬用箱8Bを把持するときには、ロック機構部6によってバランスハンド部4の原位置への固定を解除することにより、バランスハンド部4、把持部5及びワーク運搬用箱8Bを合わせた重心Gが揺動軸42の下方に位置するようバランスハンド部4が揺動した状態で、エンドエフェクタ21を移動させるよう構成してある。
(もっと読む)
多段直動アクチュエータ及びロボットハンドの指機構
【課題】ロボットハンドの指機構の屈伸用駆動系の簡素化を可能とするようなアクチュエータの提供。
【解決手段】進退動を行う直動軸3(3a、3b、3c)を有した複数の直動モータ2(2a、2b、2c)を組み合わせて多段直動アクチュエータ1を形成する。それについて、直動モータそれぞれの直動軸を中空構造として軸腔を有するように形成し、そして隣接前段の直動モータの直動軸の軸腔に対し隣接後段の直動モータの直動軸が挿通するように、各直動モータを組み合わせることで、各直動モータそれぞれの直動軸が同一の軸芯上で個々に進退動をなせるようにしている。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
開閉両方向に力を出せる把持装置
【課題】高速で駆動しかつ大きな把持力を得ることができ、開閉両方向に力を出せる把持装置を提供する。
【解決手段】第1の回転アクチュエータと、第1の回転アクチュエータで駆動される第1の動力伝達機構と、第1の動力伝達機構で駆動される第1の指と、第1の回転アクチュエータを固定載置する第1の台車と、第1の台車上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置した、第2の台車と、第2の台車に固定載置した第2の回転アクチュエータと、第2の回転アクチュエータの回転速度を減速する減速機と、減速機で駆動される第2の動力伝達機構と、第2の動力伝達機構の先端部に配置された押し板と、第1の指と共に物体を把持する、第2の指又は第1の固定壁と、を備え、第1の台車を、台座上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置し、台座には、第1及び第2の停止部と、第1及び第2のばねと、を備える。
(もっと読む)
把持装置
【課題】耐磨耗性および耐切創性に優れ、かつ、良好な把持状態が保持できるとともに、容易に交換ができる当接部を備え、さらに当接部の交換が容易でありながら、当接部が該当接部の付設部に対して変位することを防止できる把持装置を提供する。
【解決手段】ワーク50を挟圧する各挟圧部4b・4b・5bを有する各爪部4・5と、弾性素材からなる内袋11と、該内袋11に充填される粒状物12と、を備え、内袋11内を減圧して、内袋11の内容積に対する粒状物12の体積比率を増大させることにより、粒状物12を任意の形状を保持しつつ硬化させる、各挟圧部4b・4b・5bのワーク50と当接する部位に付設される各当接部6・6・6と、を有する把持部2を備える把持装置1であって、各挟圧部4b・4b・5bの各当接部6・6・6を付設する付設面4g・4g・・・に、凹凸形状を有する各係止部10・10・・・を形成する。
(もっと読む)
電動チャック
【課題】電動アクチュエーター或いはメカニカルチャックが故障した場合に部品交換が容易であり、汎用性が高く、メカニカルチャックにおけるフィンガーのワークに対する芯出し作業を手動で簡単に行える電動チャックの提供。
【解決手段】モータ9と、その回転出力軸に回転が止められて螺合した直動出力軸11とを備えた電動アクチュエーター3に、プッシャー22が押圧されることによりワーク把持用のフィンガー35が開かれ、プッシャー22が押圧されていない時はバネの力でフィンガー35が閉じるメカニカルチャック4を着脱可能に取り付けてある。回転出力軸に直動出力軸11を軸方向に調整できるハンドル19を固定する。ハンドル19は放熱部材を兼ねたアルミ合金製とすることがある。
(もっと読む)
把持装置
【課題】真空排気設備を必要としない簡易な構成で、当接部を硬化させることができる把持装置を提供する。
【解決手段】袋部材6a内を減圧させることにより、粒状物12を任意の形状を保持しつつ硬化させる、ワーク20と当接する部位である各当接部6・6・6、を有する把持部2を備え、袋部材6aの内部と外部を連通する連通配管8と、連通配管8が形成する流通経路における流体の流れ方向を袋部材6aの内部から外部へ向かう方向に規制する逆止弁9と、袋部材6aと逆止弁9を連通する連通配管8を分岐して延設した連通配管8が形成する流体の流通経路上に配設する開閉弁10と、を備え、各挟圧部4b・4b・5bによりワーク20を挟持して、各当接部6・6・6をワーク20に押圧することにより、袋部材6a内の空気を、袋部材6aの外部に流出させて、袋部材6a内を減圧する。
(もっと読む)
ロボットハンドのフィンガ構造
【課題】部品Pを複数のフィンガ72により把持するロボットハンド7において、あまりコストのかからない簡単な構造で所要の把持性能が安定して得られ、十分な耐久性を確保できるとともに、狭隘な環境下でも使用しやすい優れた構造のフィンガ72を提供する。
【解決手段】複数のフィンガ72のそれぞれにコイルばね81を巻き付け、その両端を除いた中間部分の巻き線をフィンガ72の外周に沿って長手方向に変位可能に取り付ける。こうすると、それらのフィンガ72によって取り囲むように部品Pを把持したときに接触点Cの数が増大する可能性があり、個々の接触点における摩擦力はあまり大きくなくとも、部品Pを安定して把持することができる。部品Pの寸法、形状等に応じてコイルばね81の巻き線の太さやピッチを選定することが好ましい。
(もっと読む)
1 - 20 / 87
[ Back to top ]