
Fターム[3C007EU07]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | リンク式 (124)
Fターム[3C007EU07]に分類される特許
1 - 20 / 124
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
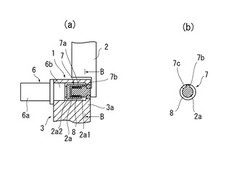
義指

【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
搬送装置
【課題】搬送装置の重量を軽減する。
【解決手段】本搬送装置1の前記カムリング20は、それぞれ複数のカム溝形成部分22と前記カム溝形成部分同士を連結する連結部分23とからなり、前記カム溝21はカムリング20の半径方向に対して傾斜して設けられ、前記カム溝形成部分22は前記カム溝21に合わせて半径方向に傾斜した形状であり、前記連結部分23は前記傾斜部よりも幅狭に形成されている。また、前記カムリング20をスタンド10に回転自在に保持する複数のカムリング保持部を、前記カムリングの前記連結部分23と前記支持体とのそれぞれの対向面に有する。
(もっと読む)
把持装置
【課題】一対の開閉レバー部の開閉方向に沿った横幅を小さくすることができ、小スペースで設置することが可能であること。
【解決手段】ロッド軸Oに沿って上下動可能とされ、下端部に連結ブロック41が取り付けられたロッド部2と、左右軸L1方向に沿って向かい合うように配設されると共に、中間部3cが前後軸L1に平行な支点軸部50に軸支された一対の開閉レバー部3と、連結ブロックと開閉レバー部の上端部3aとをそれぞれ連結すると共にロッド部の上下動に伴って開閉レバー部を左右軸方向に揺動させるリンク機構4と、を備え、開閉レバー部には、中間部から上端部に至る部分の少なくとも一部に切欠部55が形成され、一対の開閉レバー部が、切欠部内にロッド部及び連結ブロックを入り込ませた状態で左右軸方向に向かい合うように配設され、それぞれの上端部が前後軸方向に沿ってロッド部及び連結ブロックの両側に位置している把持装置を提供する。
(もっと読む)
回転体の把持装置
【課題】簡単な構成で、タイヤなどの回転体の中心位置を位置決めできる回転体の把持装置を提供する。
【解決手段】タイヤ把持装置10を、把持アーム11〜13と、基台21と、基台21に立設された中心ピン部材22と、中心ピン部材22に回転可能に取付けられた板状部材23と、固定側ピン部材P1k(k=1〜3)、可動側ピン部材P2k、固定側アームA1k、可動側アームA2k、及び、中間ピン部材P3kとを備えた連結機構24とから構成するとともに、中心ピン部材22の下端と固定側ピン部材P1kを結ぶリンクを固定リンクとし、中心ピン部材22の上端と可動側ピン部材P2kを結ぶリンクと可動側アームA2kと固定側アームA1kとをそれぞれ第1〜第3の可動リンクとした3つのリンク機構により、固定側アームA1kの先端に取付けた把持アーム11〜13を拡幅して、タイヤTの内縁部を把持するようにした。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
ロボットハンド
【課題】新たな機能を搭載したロボットハンドを提供する。
【解決手段】ボール14やブロック15といった物体を挟み込んで把持するために複数の指本体5を備えたロボットハンド1は、以下のように構成されている。即ち、指本体5には、その指本体5の把持面8と反対側の反把持面10に、例えば手提げバッグ12といった他の物体を引っ掛けることが可能な引っ掛け部11が形成されている。引っ掛け部11は、指本体5の反把持面10に凹状に形成されている。各指本体5の先端部5cには、把持側に突出した突部9が形成されている。
(もっと読む)
開閉チャック
【課題】ワークの把持を正確に検出することが可能な開閉チャックを提供する。
【解決手段】爪によりワークを把持する開閉チャックであって、ガイドレールを有するガイド部材と、ガイドレール上を摺動するよう設置され、爪を取り付け可能な第1及び第2のスライダと、第1及び第2のスライダが互いに離間又は接近するよう、第1及び第2のスライダを摺動させる駆動源と、ガイド部材において、第1及び第2のスライダに取り付けられた爪がワークを把持した際にひずみが生じる位置に取り付けられたひずみセンサと、を備える開閉チャック。
(もっと読む)
ロボットハンド
【課題】任意の形状を有する対象物体を安定して把持することができるロボットハンド機構を提供することにある。
【解決手段】ロボットハンド機構においては、第1及び第2可動部305A、305Bが直動機構304に移動可能に支持される。第1可動部305Aは、接続機構401を介して指部101Aの受動回転部104及び指部101Cの受動回転部104に結合される。第2可動部305Bは、接続機構401を介して指部101Bの受動回転部104及び指部101Dの受動回転部104に結合される。直動機構が駆動モータ301によって駆動されると、第1及び第2可動部305A、305Bが互いに反対向きに移動される。第1及び第2可動部305A、305Bの直動運動に伴って、接続機構401によって各受動回転部104が回転される。この結果、指部101A、101B、101C、101Dの駆動方向が変更される。
(もっと読む)
電動把持装置
【課題】
電動モータの通電を停止した場合であっても、ワークに対して確実に把持力を及ぼし続けることが可能であり、省エネルギ化を図りながらも、ワークを所定の姿勢で確実に把持し続けることが可能な電動把持装置を提供する。
【解決手段】
電動モータによって並進運動が与えられる駆動部材と、ワークを把持するように開閉する複数の可動爪と、前記駆動部材の変位に連動して各可動爪を変位させるリンク機構と、前記モータの通電停止時に前記駆動部材の変位を制限するロック機構とを備え、前記リンク機構は一乃至複数のリンクを含み、また、前記一乃至複数のリンクは少なくともその一つが弾性体からなり、前記可動爪がワークを押圧した際にその反力によって変形して弾性力を蓄積するように構成されている。
(もっと読む)
万能チャック
【課題】 従来、工場等の製造現場で、品物、ワークの物を、確実、かつ安定的に挾持、搬送できる機具として、万能チャックがある。万能チャックは、大小の物を、挾持、搬送する手段として活用されている。しかし、異形、歪等の如く、特殊な形状の物を、挾持、搬送する手段として、希望する器具がないのが現況である。
【解決手段】 作業機械のアームに取付ける本体に、対で枢支した第一アームと、第一アームを駆動するモータと、第二アームとを駆動するモータと、第三アームを駆動するモータと、垂下杆と、垂下杆の先端に設けた挾持具で構成した万能チャックで、第一〜第三アームを、本体と、第一アーム、第二アームに移動可能に構成し、第一〜第三アームの移動を、本体と、第一アーム、第二アームに設けたモータと、モータの駆動で回転する移動機構とする万能チャックである。
(もっと読む)
ロボットハンド及びロボット装置
【課題】安定して対象物を把持することができるロボットハンド及びロボット装置を提供すること。
【解決手段】所定位置を囲うように配置された支持部材を有する複数の指部と、複数の指部の一端部と連結する連結部と、を備えたロボットハンドであって、少なくとも1つの指部は、屈曲部を有する接触部材と受動素子とを有し、接触部材は屈曲部で回転可能に支持部材に支持され、受動素子は支持部材と接触部材とに接続されている。
(もっと読む)
制御回路簡略化ロボット
【課題】制御回路、アクチュエータ、把握機構を軽減し、きめ細かいロボット製作やメンテナンスを可能にする。
【解決手段】制御装置の解決手段についてはプログラムを収めるメモリのアドレスを指定する装置として二つ以上の加算または減算のみを行うカウンタと、そのどちらを加算または減算するかを切り替える装置を取り付ける事により、メモリアドレスのジャンプを行う回路を廃し回路の複雑化を防ぐ。アクチュエータの機構に関する解決手段としては一本の出力軸を複数のモーターが共有し、そのモーターの中のひとつだけを正転用、残りのモーターを逆転用として取り付ける事でモータードライブ回路の単純化を実現する。物体の把握機構におけるアクチュエータ過負荷対策として複雑化してしまう傾向に対しては、錘を用いて地球の重力を利用した把握機構を製作することにより、アクチュエータへ直接過負荷が加わる事を防ぐ。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
ハンド装置
【課題】大きさの異なる複数の所定ワークを把持する際に、ワークの大きさに合わせて把持状態検出センサの位置調整を行う必要がなく、フィンガの開閉時間及び把持力の変動を小さくすることができ、コストの増大及び生産性の低下を抑制することができるハンド装置を提供する点にある。
【解決手段】ワークを把持する把持手段2のオン−オフ式の開閉動作を行ってワークの脱着を行うハンド装置1であって、把持手段2が複数のフィンガ3,3を同期させて開閉するものであり、フィンガ3,3に、被把持部の大きさが異なる複数のワーク又は複数の被把持部の大きさが異なる単一のワークを把持する、複数の把持部C1,C2を設け、把持部C1,C2を、対応する前記被把持部を把持した際におけるフィンガ3,3の開き位置が同じになるように、前記被把持部の所定の大きさに合わせて形成した。
(もっと読む)
ロボットグリッパーで物体を扱うことに関するシステム及び方法
【課題】グリップ条件や掴まれる物体の振る舞いを決定し、その物体の振る舞いに基づいてグリッパーを制御する。
【解決手段】グリッパーで物体を扱うことに関するシステムは、グリッパーにより扱われる物体の位置を表す空間分布データを測定するように構成されたセンサを備えている。システムは、物体の振る舞いを決定するように構成された計算ユニットを更に備えている。
(もっと読む)
ロボットの関節構造、ロボットフィンガー及びロボットハンド
【課題】リンク部の回転角度を大きくすることなく、大きな物体から小さな物体までを確実に把持することができるロボットの関節構造、その関節構造を備えたロボットフィンガー、及びそのロボットフィンガーを備えたロボットハンドを提供する。
【解決手段】相対的に移動可能に連結された第1リンク部1及び第2リンク部2と、第2リンク部2を第1リンク部1に対して回転させると共に第1リンク部1の長手方向(X方向)に沿って移動させる駆動手段4と、を備えることを特徴とする。
(もっと読む)
搬送装置及び真空装置
【課題】搬送物や周囲の雰囲気温度が比較的低い環境下においても当該温度が高い環境下においても搬送物を確実に保持して高速搬送を図るとともに、搬送物の搬送時におけるダストをできるだけ少なくする技術を提供する。
【解決手段】本発明の搬送装置50は、駆動源からの動力が伝達される複数のアームを有する伸縮自在なリンク機構20と、リンク機構20の動作先端部において第3の左アーム3L、第3の右アーム3Rを介して連結され基板10を載置するための載置部5とを備える。載置部5の基板搬送方向下流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10をリンク機構20に向かう方向へ付勢する下流側付勢機構7が設けられ、載置部5の基板搬送方向上流側の部位に、リンク機構20の動作に伴い、基板10の側部と当接して基板10を基板搬送方向へ付勢する上流側付勢機構9が設けられている。
(もっと読む)
1 - 20 / 124
[ Back to top ]