
Fターム[3C007EV07]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | 係合(凹凸係合、フランジ縁係合等) (51)
Fターム[3C007EV07]に分類される特許
21 - 40 / 51
ワーク把持装置

【課題】 アウタ部材を寝かせた状態でアウタ部材上にインナ部材をセットしてサブアッセンブリしたワークを、アウタ部材とインナ部材との相互の位置ずれやアウタ部材の外表面の傷付きを生ずることなく、ヘミング装置に投入できるようにしたワーク把持装置を提供する。
【解決手段】 アウタ部材(WRO、WLO)を寝かせた状態で該アウタ部材上にインナ部材(WR1、WL1)をセットしてサブアッセンブリしたワークを、該アウタ部材の周囲の曲げ起こされた曲げ縁部をヘミング加工してアウタ部材とインナ部材とを一体化するヘミング装置に投入するためのワーク把持装置において、サブアッセンブリしたワークのうち、前記アウタ部材の周囲複数の辺(WOa、WOc、WOd)の曲げ起こされた曲げ縁部(WOe)を、開閉される1対の把持爪(82b、82c)で該曲げ縁部(WOe)の内外の両側から把持して、サブアッセンブリしたワークを投入するようにした。
(もっと読む)
グラビア製版用ロボット

【課題】各処理工程における汚染の発生を防止し、かつ各処理工程におけるより迅速な処理作業が可能な新規なグラビア製版用ロボットを提供する。
【解決手段】基台と、該基台上に回転可能に載置された多軸ロボットアームと、該多軸ロボットアームの先端部に取付けられ、互いの間隔が広狭自在とされた相対向する第一サイドプレート及び第二サイドプレートと、該第一サイドプレート及び第二サイドプレートのそれぞれに取付けられ、かつ前記中央開口部を閉塞するように該中央開口部に挿入されることにより、前記中空シリンダロールを挟持するための第一挟持閉塞部材及び第二挟持閉塞部材と、第一挟持閉塞部材を回転させるための第一駆動手段と、第二挟持閉塞部材を回転させるための第二駆動手段と、を含むようにした。
(もっと読む)
基板容器用ロボットハンドと蓋付基板容器
【課題】容器及び蓋からなる薄い基板容器を、容器に挟み込む力を作用させることなくハンドリングして、炉内に積層して載置し、炉内から搬出することができ、これにより基板の汚染を防止しながら水蒸気アニール処理をし、かつ炉内処理領域への基板のセット数を高めて、スループットを高めることができる基板容器用ロボットハンドと蓋付基板容器を提供する。
【解決手段】水平に位置する蓋付基板容器3の外縁に沿って延び、水平かつ対向して互いに平行に拡縮可能な1対の容器支持枠12と、容器支持枠を蓋付基板容器の外縁に近接する縮小位置Cと離れた拡大位置Oとの間で移動させる支持枠駆動装置14と、支持枠駆動装置を支持し、容器支持枠を間隔を隔てて水平に囲む枠部材16とを備える。蓋付基板容器3は、その外周の少なくとも一部に所定角度のテーパ下面3cを有し、1対の容器支持枠12は、縮小位置においてテーパ下面に近接しかつ同一角度のテーパ上面12aを有する。
(もっと読む)
把持装置及び積込装置
【課題】各寸胴型の把持対象物間の間隔を空けることなく箱詰めするのに適した把持装置を提供する。
【解決手段】把持装置は、開放状態において、ベースプレートの連通孔からシリンダ内にエアが送られると、ピストンが下降し、当該ピストンの下降に伴って、本体部の4隅相当部位に上下摺動自在に立設された各プッシュロッドも下降する。各プッシュロッドが下降すると、プッシュロッドのそれぞれの移動に伴う楔作用により、各係合部材はそれぞれの一部分が本体部の内方の空間に向かって突出するので、各係合部材の一部分が寸胴型のボトルのくびれ部に押し付けられて係合し、当該係合により、把持装置は、寸胴型のボトルを把持することができる把持状態を形成する。把持状態においてシリンダ内のエア圧を開放すると、ピストン及び各プッシュロッドが上昇し、把持装置は開放状態となる。
(もっと読む)
ディスクチャック機構およびディスクハンドリングロボット
【課題】
複数枚のチャックされたディスクを1枚ごとに効率的に受け渡しができ、ディスク検査処理のスループットを向上させることができるディスクチャック機構およびディスクハンドリングロボットを提供することにある。
【解決手段】
この発明は、中心に開口を有するディスクの内周と外周の2点でディスクをチャックする場合において、チャック部材(フィンガ)の1つにはディスクの内周に対応して所定間隔で谷溝が複数設け、他のチャック部材(フィンガ)には前記のチャック部材(フィンガ)に対して奥に向かって距離が開く傾斜(例えば階段状の切込み段差)もって谷溝を形成して、チャックの開閉(部材の接近、離間)により複数枚のディスクのうちの先頭の1枚のディスクのみの内周と外周とをチャックするようにしている。
(もっと読む)
保持装置およびこれを有する搬送装置
【課題】 簡単な機構を有し、内ねじ部21を有する被保持体を短時間に強固に保持する、被保持体の保持装置およびこれを有する搬送装置を提供することである。
【解決手段】 筒状体11の突出部111は、外周部の少なくとも一部に外ねじが形成されている外ねじ領域111aを有し、該突出部111は、先細状態と開張状態とに弾性変形可能である。先細状態において突出部111は、摺動方向一方Z1に向かうにしたがって先細となる形状であり、開張状態において突出部111は先細状態のときよりも摺動軸線から離れた形状となる。突出部111の内部空間に摺動部131が進入することによって、先細状態の突出部111は開張状態となる。
(もっと読む)
基板移載装置
【課題】フォトマスク等の基板の移載が容易に行える基板移載装置を提供する。
【解決手段】本発明による基板移載装置100は、ベース部111に固定されたシャフトを中心に回転可能な回転胴部112と、回転胴部112の側面に上下動可能に取り付けられたアーム部120と、アーム部120の先端部に水平方向に回転可能に取り付けられた把持部130とを備える。把持部130は、上下動可能な下側把持爪133と上側把持爪134とによって、移載対象となる基板を垂直に立てた状態で上下方向に把持する。更に、把持部130は、垂直に立てた状態で把持されている基板に垂直な軸を中心に微小角度回転することができ、基板の重さでアーム部120がたわんで把持部130が傾いてしまうような場合にも、基板を水平に保持することができる。
(もっと読む)
ワーク把持装置
【課題】ロボットに連結されるフレームと、そのフレームに支持された第1乃至第3のクランプ装置を有し、第1乃至第3のクランプ装置のクランプをワークに係合させて、該ワークを把持するワーク把持装置において、1台のワーク把持装置によって各種形態のワークを把持して運搬できるようにする。
【解決手段】第2のクランプ装置9Aを第1のクランプ装置9に対して接近又は離隔する方向に移動可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのピンクランプ14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
成型方法及び成型装置
【課題】成形機に対して交換可能に構成される開閉可能な成形型から、その型開き状態において成形品が取り出される際に、成形品を取り外すため、成形型ごとに専用の取外し具が用いられる構成において、共通の成形機に用いられる成形型が多種類であっても、取外し具の交換や保管のためのスペースが不要で省スペース化が図れ、取外し具の交換作業について自動無人化を図る。
【解決手段】開閉可能な成形型2と成形型2を着脱可能に支持する成形機3とを備え、成形型2にて成形した成形品を成形型2から取り出す際に、成形品を取り外すためのアタッチメント20(取外し手段)を用いる成形装置1であって、アタッチメント20の着脱動作及び所定の移動動作並びにアタッチメント20の操作を自動的に行うロボット35(取出し手段)と、成形型2に設けられアタッチメント20を載置支持するATスタンド40(支持手段)とを備える構成とした。
(もっと読む)
部品把持機構
【課題】被加工部品の種々の変更に自在に対応できる多軸ロボットを用いた部品把持機構を提供する。
【解決手段】本発明の部品把持機構は、多軸ロボット1に装着される、一対の爪11を備えた平行ハンド4と、平行ハンド4の一対の爪11に把持される、部品を搬送するための部品搬送冶具5とを有する。爪11は、互いに対向する対向面にピン10を有し、対向面の角部が面取りまたは曲面加工されている。部品搬送冶具5は、平行ハンド4の一対の爪11によって把持される本体部5dと、部品を保持する保持部5eとを有する。本体部5dの側面には、爪11が嵌合する一対の把持用溝5aが形成され、かつ把持用溝5a内に爪11のピン10が嵌合する穴5cが形成されている。保持部5eは、本体部5dの側面以外の端面に設けられており、部品を吸着する磁石5fを有する。
(もっと読む)
走行型ロボット装置及びその制御方法
【課題】比較的重量物であるワークに対してもアームを肥大化させることなくコンパクト化を図ることができ、ワークの積み降ろしにかかるサイクルタイムを短縮することができる走行型ロボット装置及びその制御方法を提供すること。
【解決手段】複数のリンク機構(第一リンク機構11・第二リンク機構12)により水平方向に旋回可能及び伸縮可能に構成されるアーム7と、アーム7の先端部に設けられワークを支持するフォーク9(ワーク支持体)を支持するとともに昇降及び旋回させるロボットアーム20(昇降旋回手段)とを有するロボット6を、走行台5上に備える走行型ロボット装置1であって、フォーク9と連結され、該フォーク9の、ロボットアーム20による昇降動作、旋回動作及びアーム7の伸縮による水平方向の移動動作をアシストするアシスト手段30を設けた。
(もっと読む)
ロボットのクランプハンド
【課題】ワークの穴部を用いてワークを挟持するロボットのクランプハンドにおいて、穴部の径の大きさが変化しても安定的にワークを挟持できるとともに、より短時間にワークを挟持することができるロボットのクランプハンドを提供する。
【解決手段】穴部を有するワークを挟持可能なクランプ爪部40を備え、クランプハンドには、穴部の軸方向に挿入されるクランプ爪部と、クランプ爪部を動作させる駆動手段20とを備えており、駆動手段にはクランプ爪部の移動方向を案内する案内部材30が設けられている。そして駆動手段にて案内部材を所定方向に移動させる動作のみで、穴部の軸方向に挿入されたクランプ爪部を、穴部の内壁に近づくように移動させる動作と、ワークの穴部の軸方向に沿ってクランプハンドの側に引き寄せる方向に移動させる動作とを行わせる機構を備え、穴部の端部または段差にクランプ爪部を係止してワークを挟持する。
(もっと読む)
基板把持ハンド装置と基板把持方法及びそれを用いた基板搬送装置並びに基板処理装置
【課題】基板搬送の際、基板への異物の付着を最小限に止め、ハンドの動作領域を小さくする最小限の外形寸法に抑えた軽量でコンパクトな基板把持ハンド装置と基板把持方法及びそれを用いた基板搬送装置並びに基板処理装置を提供する。
【解決手段】ハンド基板200と、該ハンド基板上に設けられ左右に配置され前記基板100の側面に接触する一対のアーム208と、該アーム208による前記基板100への接触側に対して対向側で前記基板100に接触するように前記ハンド基板上に設けられた駆動プレート204とを有し、前記アーム208と駆動プレート204との連動によって前記基板100を把持する。
(もっと読む)
加工物移送装置
1つ以上の加工物、例えば、半導体ウエハを操作するための加工物移送アセンブリは、加工物の外径に対応する1つ以上の弓状部分を含む。この弓状部分は、加工物の外端に係合する加工物係合表面を有する;少なくとも1つの協働アームが、加工物の係合表面から加工物の外端部上に加わる圧力に応じて、加工物から離れる方向に加工物係合表面の変形を可能にするたわみアセンブリを含む。 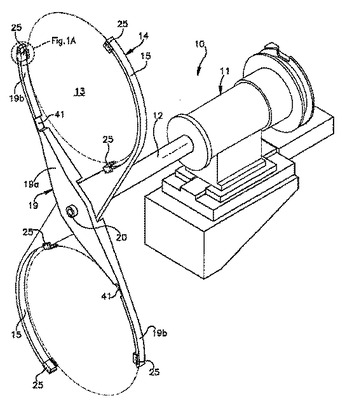 (もっと読む)
(もっと読む)
半導体ウエハ移載装置、半導体ウエハ取出方法及び半導体ウエハ収容方法
【課題】半導体ウエハ移載装置の構造を簡易にしかつその製造コストを低減することができ、全ての半導体ウエハを短時間で効率良く容器から取り出しあるいは容器に収容できる半導体ウエハ移載装置、半導体ウエハ取出方法及び半導体ウエハ収容方法を提供する。
【解決手段】半導体ウエハWの一部がフープ32から露出してきたところで一対の支持部材14、16を挿入させることにより、複数枚の半導体ウエハWの全てを一度に一対の支持部材14、16で支持させることができ、フープ32から全ての半導体ウエハWを一度に取り出すことができる。一方、複数枚の半導体ウエハWの全てを一度に一対の支持部材14、16で支持させることにより、全ての半導体ウエハWを一度にフープ32に収容することができる。
(もっと読む)
把持装置
【課題】 ボトルの先端部を保持することができ、かつ、コンパクトなボトルの把持装置を提供する。
【解決手段】 中心軸5と、中心軸5に取り付けられた内筒3と、内筒3の外周部分に取り付けられ開閉自在な3本以上の指部材2と、指部材2を開方向に付勢して開状態を保持する開保持手段23と、指部材2に対し移動することで、指部材2を閉方向に付勢する外筒4とを備え、各指部材2の内周面には、各々、周方向に互いに分割されオネジ部B1に嵌り込む分割メネジ21が形成され、内筒3が中心軸5の軸方向Zの双方向に移動自在に取り付けられていることで、指部材2が閉方向に閉じる際に指部材2が軸方向Zに移動して分割メネジ21がオネジ部B1に嵌り込むのを可能としたことを特徴とする。
(もっと読む)
コンテナボックス及びコンテナボックス移載用ロボット
【課題】 蓋の有無にかかわらず移載が可能であり、移載後の輸送の際にも荷崩れの心配の無いコンテナボックス及びその移載用ロボットを提供する。
【解決手段】 直方体状のコンテナボックス1の隣り合う側板部12が成すうちの対角線上の一対の角部2には、ロボットのメカハンド21が保持する部分である保持部が設けられ、保持部は、メカハンド21の先端が接触する凸部14と、メカハンド21がコンテナボックス1を保持した際に荷重を受ける荷重受け部とを含む。荷重受け部は、角部13の上端から外側に向けて突出した鍔部15である。凸部14は、上下方向に長く水平方向の断面形状が半円形であり、メカハンド21の先端の形状に適合する。凸部114は、メカハンド21が接触した際にコンテナボックス1の水平方向の動きを規制する。
(もっと読む)
マイクロマニュピュレータ
【課題】顕微鏡視野内において微小物体を確実かつ迅速に把持することができるマイクロマニュピュレータを提供する。
【解決手段】マイクロマニュピュレータは微小物体を2本の把持指で把持するハンドリング機構104を備えている。ハンドリング機構104は、微小物体に接触するエンドエフェクタ505aを有し不動の固定指505と、微小物体に接触するエンドエフェクタ507aを有し支点軸を中心に回動可能な可動指507と、可動指507を支点軸を中心に回動させるアクチュエータ502と、を有している。可動指507がアクチュエータ502の駆動により回動することで固定指505のエンドエフェクタ505aの先端に可能指507のエンドエフェクタ507aの先端が接触可能に構成されている。
(もっと読む)
サッシュ部材把持装置
【課題】 構造が簡単で、汎用性に富み、サッシュ部材を迅速且つ安定的に把持できる把持装置を提供することにある。
【解決手段】 溝112の側壁11a,11b間の距離よりも全長が大きく且つ油圧モータにより回動自在にされることで回動時に側壁11a,11bに押圧される把持片47と、油圧モータ側に設けられるとともに、把持片47による側壁11a,11bの押圧時に、溝112内に位置し、少なくとも一方の側壁11a、詳しくは、突部11dに当接自在でロアサッシュ11を他のサッシュ部材に位置決め可能な位置決め片117と、を備えた。
(もっと読む)
サッシュ部材把持位置決め装置
【課題】 予め設けられたサッシュ部材に別のサッシュ部材を連結するときに、予め設けられたサッシュ部材の組付誤差を吸収でき、構造が簡単で位置決めが容易なサッシュ部材把持位置決め装置を提供することにある。
【解決手段】 搬送装置21に取付けた機台25と、この機台25にロアサッシュ11を把持するために取付けた第1把持装置26と、この第1把持装置26の中間部にフローティング自在に且つ原位置復帰自在に取付けた第2フローティング機構32と、このフローティング機構32に取付けた第2把持装置33と、これらの第1把持装置26及び第2把持装置33で把持した状態のロアサッシュ11の一端部11hをドア側のサッシュの端部に対して位置決めするために、ドア側のサッシュに設けた連結部に嵌合自在に第2フローティング機構32に設けた位置決め片117と、を備えた。
(もっと読む)
21 - 40 / 51
[ Back to top ]