
Fターム[3C007JU14]の内容
マニピュレータ、ロボット (46,145) | 教示装置、操作盤 (625) | 操作盤のタイプ (328) | 可搬型操作盤 (151)
Fターム[3C007JU14]に分類される特許
1 - 20 / 151
ロボット制御装置、教示装置及びロボットシステム
【課題】
教示装置と通信が確立していないときに、障害が発生したロボット制御装置側から教示装置に対して通信確立を要求するため、複数のロボット制御装置の中から作業者が、障害が発生しているロボット制御装置との通信を迅速かつ正確に確立することができるロボット制御装置、教示装置及びロボットシステムを提供する。
【解決手段】
ロボット制御装置20の通信制御部22は障害が発生したときに、特定のティーチペンダント10と無線通信が確立していない場合、特定のティーチペンダント10に関する接続先情報を宛先にした通信確立要求を出力する。第3記憶部24cは返信された特定のティーチペンダント10に関する送信元の固有の送信元情報を記憶する。通信制御部22は通信確立要求応答があった後、送信元情報を宛先として、返信したティーチペンダント10に対して交信を行う。
(もっと読む)
ロボット制御システム

【課題】複数の可搬式操作装置を1台のロボット制御装置に同時接続した場合、教示機能が有効な可搬式操作装置を識別できない。
【解決手段】ロボット制御システム1は、ロボットRと、教示操作信号を送信する可搬式操作装置TPと、教示操作信号を受信してロボットRへの教示作業を行う教示機能を有する制御装置RCにより構成される。制御装置RCは、可搬式操作装置TPとの無線通信を確立する際に、可搬式操作装置TP毎に教示機能を有効化又は無効化する通信確立手段を備える。可搬式操作装置TPは、無線通信の確立状態を示す通信状態表示灯3と、教示機能の有効/無効を示す非常停止スイッチ4とを備える。通信確立の際に、現在の接続数が0の時に前記教示機能を有効化し、1以上の時は無効化したモニタモードを選択する。可搬式操作装置TPの接続形態が表示されるので教示に使用できる装置を容易に判別できる。
(もっと読む)
産業用ロボット
【課題】産業用ロボットに、3次元の作業に必要十分な構成を与えつつも、その操作について特にスクーリングを必要とせず誰でも視覚的・経験的にティーチング及び操作が可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1が、アーム2と、アームを支えることが可能な柱部材3と、柱部材の土台4とを備える産業用ロボットであって、アームは、柱部材に対して、アーム先端部22からの長さを水平方向に手動で調節可能に取り付けられ、かつ上下(Z軸)に自動でスライド可能であり、柱部材は、土台に対して鉛直線を軸として手動で回転可能に設けられており、かつ自動で水平方向にスライド可能に取り付けられ、ティーチング及び操作機器として、少なくとも1つの十字キー又はレバーと複数のボタンを有するゲームコントローラ6を備えていることからなる。
(もっと読む)
操作環境モデル構築システム、および操作環境モデル構築方法
【課題】作業ロボットの導入環境のモデル化負担を低減すること。
【解決手段】操作環境モデル構築システム100は、被操作体の計測により得られる立体像に対して幾何プリミティブを適応させて被操作体の幾何的特性を示す幾何情報を生成し、幾何情報の生成対象である被操作体の空間位置を示す位置情報を取得し、被操作体に対して作業ロボットにより行われるべき操作内容を示す操作情報を、生成された幾何情報及び取得された位置情報に対して関連付けて記憶する。被操作体に対して操作タグを仮想的に設定することができ、作業ロボットの導入環境のモデル化負担の低減を図ることができる。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
ロボットの制御方法およびロボット制御装置
【課題】ユーザ座標系がポジショナに搭載又はマニピュレータに把持されたワークの形状に合わせて設定されている場合、ワークの位置姿勢が変わるとユーザ座標系の再設定が必要になる。
【解決手段】ワークWの形状に応じた軸方向を有するユーザ座標系Cuの設定する際に、特徴点E1〜E3の位置教示に加えて、特徴点の位置座標値を記憶する座標系を、少なくともワーク座標系を含む複数の座標系の中から選択する。特に、ユーザ座標系Cuを、ポジショナP(またはマニピュレータMとは別のマニピュレータ)に搭載されたワークWの形状に応じて設定するときは、特徴点の位置座標値をワーク座標値で記憶する。このことによって、(b)のように、ポジショナPが回転してワークWの位置姿勢が変化したとしても、ユーザ座標系Cuが追従する。すなわち、ユーザ座標系を再設定することなく、そのまま利用することができる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
ロボット制御システム
【課題】予め定められた座標系でジョグ送りする場合は複数のキーの組合せ操作が必要なため操作が煩雑になる。
【解決手段】ツールの移動方向を定める方向指示キー41Aを備え、指示された移動方向および手動操作座標系に基づき、ツールをジョグ送りするロボット制御システム10である。ジョグ送り操作時に、手動操作座標系を構成する座標軸のうち1つを選択する。次に座標軸の回転角度を設定する。そして、手動操作座標系を座標軸中心に回転させ、回転後の手動操作座標系に従ってツールをジョグ送りする。上記回転角度は、ジョグダイヤル42によって設定しても良い。また、方向指示キー41のいずれか1つを押下したまま、ジョグダイヤル42によってリアルタイムに座標系を回転させながらアナログ感覚でジョグ送りすることもできる。軸方向をいつでも変更可能とすることによりジョグ送り操作時の煩雑さを解消する。
(もっと読む)
操作器の表示制御装置、及び操作器の表示制御方法
【課題】最低限の大きさの表示部しか備えられないであっても、作業者の操作性を向上させることのできる表示制御装置、及び表示制御方法を提供する。
【解決手段】ティーチングペンダント10は、画像を表示する液晶表示器14を備えている。制御部30は、ロボット70の各機能の実行に用いられる各ボタンを液晶表示器14に表示させる。制御部30は、ボタンのうち説明表示が要求されているボタンを主ボタンとして、主ボタンに関連する副ボタンを選択し、主ボタン及び副ボタンの説明を、液晶表示器14のうち主ボタン及び副ボタンが表示されていない部分に表示させる。
(もっと読む)
アクチュエータ及びアクチュエータシステム
【課題】コントローラの配置位置にかかわらず、ティーチングを容易に行うことを可能とするアクチュエータ及びアクチュエータシステムを提供する。
【解決手段】アクチュエータシステムAは、アクチュエータ10と、アクチュエータ10を制御するためのコントローラ20と、アクチュエータ10のプログラムを作成するためのティーチングを行うティーチングペンダント30と、を有する。そして、アクチュエータ10は、コントローラ20と、ティーチングペンダント30と、を接続する中継ユニット11を備える。これにより、アクチュエータ10から離れた位置に、コントローラ20が配置されている場合においても、作業者は、アクチュエータ10の動作を目視しやすい位置で、ティーチングを行うことができるようになる。
(もっと読む)
ロボット教示装置
【課題】イネーブルスイッチを備えるロボット教示装置において、ロボットの動作に関する物理量の調整を効率的に行うことのできる技術を提供する。
【解決手段】ロボット教示装置300は、所定の操作可能範囲内における操作量が大きくなるにつれ、ロボットを停止状態、作動状態、停止状態の順に切り換えるイネーブルスイッチ316と、前記操作可能範囲内のロボットが作動状態となる区間におけるイネーブルスイッチ316の操作量を検出する検出部と、ロボットが作動状態にある場合に、前記検出された操作量に応じて、ロボットの動作に関する物理量を調整する制御部と、を備える。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
ロボットの遠隔操作システム
【課題】連続的に作業指示を行うことができるロボットの遠隔操作システムを提供する。
【解決手段】本発明のロボットの遠隔操作システム1(1000)は、第1の撮像手段110(410)と、作業指示手段120(420)と、ロボット200と、を備える。作業指示手段は、第1の撮像手段の位置情報、作業対象物が含まれるように撮像された画像情報、作業対象物に対して実行させる作業指示情報をロボットに送信する。ロボットは、作業指示手段から受信した第1の撮像手段の位置情報に基づいて移動し、周辺情報取得手段250、260でロボットの周辺の情報を取得し、取得した周辺情報と作業指示手段から受信した画像情報との照合結果から作業対象物の位置情報を取得し、取得した位置情報に基づいて作業対象物に近づき、作業指示手段から受信した作業指示情報に基づく作業を作業対象物に対して実行する。
(もっと読む)
操作入力装置およびマニピュレータシステム
【課題】操作者が操作部を正常に操作できない状態となったときにそれを迅速に検知し、表示物の意図しない動きを防ぐ。
【解決手段】ディスプレイ4と、操作者Bの頭部Cに装着される頭部装着部5と、操作者Bの操作によりディスプレイ4上に表示された表示物2に対する操作信号が入力される操作部6と、頭部装着部5と操作部6との相対位置を検出する相対位置検出手段8,12と、該相対位置検出手段8,12によって検出された相対位置に基づいて、操作部6に入力された操作信号に従って表示物2の動作を制御する第1の制御モードと、操作部6に入力された操作信号に対して制限をかけて表示物2の動作を制御する第2の制御モードとを切り替えて表示物2を制御する制御部7とを備える操作入力装置1を提供する。
(もっと読む)
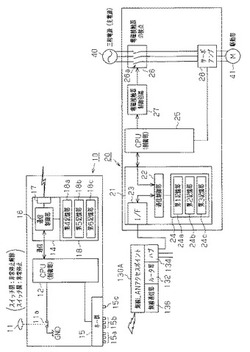
ロボットシステム
【課題】有線型の教示装置を引き続き使用しつつ無線通信機能を実現して導入コストを抑制できるとともに、ケーブルの取り回しの煩雑さを解消し、なおかつ作業者に無線化に伴う負担を強いることがないロボットシステムを提供する。
【解決手段】
ロボット1と、ロボット1の教示や操作に用いる教示装置3と、ロボット1および教示装置3と接続されてロボット1を制御するロボット制御装置2とを備え、教示装置3は、教示装置3とは別体であって、ケーブル41を通じて教示装置3に接続される無線化装置4を介してロボット制御装置2との間で無線通信を行う。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
操作装置と可動機械制御装置とを非接続状態としても可動機械を稼働させる場合において、接続状態に戻す際に、非常停止機能の安全性を確認するために可動機械を停止する必要があった。
【解決手段】
半導体スイッチ34,34Aは、教示操作装置50が非接続状態において、オン作動すると、リレーRY1,RY3を励磁して非常停止スイッチ回路SC1,SC2が外されたことによるロボットRの停止を無効化する。診断回路40,40Aは、半導体スイッチ34,34Aがオン作動している期間に、メーク接点RY1a,RY3aがオフ作動しない範囲で半導体スイッチ34,34Aの診断を行う。教示操作装置50を接続状態に戻す際に可動機械を停止することなく非常停止機能の安全性を診断することができる。
(もっと読む)
ロボットシステム
【課題】オペレータがペンダントを操作してロボット本体のマニュアル動作を実行させる際に、オペレータの主観によることなく、一意的にペンダントの向きとロボット座標系とを対応させて移動方向の指示操作を行う。
【解決手段】ロボットコントローラ3は、ペンダント4のカメラ17によりロボット本体2の撮影画像データを取込むと共に、ロボット本体2の現在の位置姿勢情報から、3Dモデルを作成する。3Dモデルを、カメラ17による撮影画像と最も類似性が高くなるまで視点移動により動かし、探し出された最も類似性の高い視点をペンダント視点とする。ロボット座標系と、ペンダント4のタッチパネル14の軸系とのズレ量を設定する。ペンダント4のタッチパネル14により指示操作される移動方向を、設定されたズレ量に応じてロボット座標系での移動方向に変換することでロボット本体2(手先)の移動方向に同期させる。
(もっと読む)
ロボット同期化装置及びその方法
【課題】ロボット同期化装置及びその方法を提供する。
【解決手段】本発明の一実施形態によるロボット同期化装置は、仮想ロボットを操作する命令を入力され、入力された操作命令に基づいて、実機ロボットの物理的なモデル及び動作が定義されたデータを基に仮想ロボットの動作をモデリングし、モデリングされた仮想ロボットを出力する。
(もっと読む)
裁断機
【構成】 裁断機は、裁断ベッドと裁断ヘッドとを備えた裁断機本体と、裁断機に固定のコントローラと、方向指示入力部を備えたハンディコントローラとを備えている。裁断機に対するハンディコントローラの位置、あるいはハンディコントローラの方向を検出し、検出した位置あるいは方向に従って、方向指示入力部の設定を切り替える。
【効果】 裁断機のいずれの側からハンディコントローラを操作する場合でも、手前と奧及び右と左の関係が作業者の感覚と一致する。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
1 - 20 / 151
[ Back to top ]