
Fターム[3C007KS36]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 距離、接近 (394)
Fターム[3C007KS36]に分類される特許
1 - 20 / 394
ロボットハンド及びロボット装置
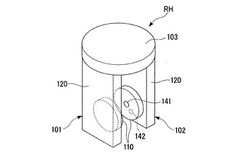
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
ロボットハンド及びロボット装置

【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
立体的表示方法
【課題】3次元データについて、特殊な表示装置等を用いることなく、ワークの傾きや重なりを認識することが可能な立体的表示方法を提供する。
【解決手段】ワーク1の3次元データと、3次元データについて所定の視点から視認した場合における2次元データを作成する視覚化装置20と、2次元データの表示が可能である表示装置21と、を準備し、観察者が3次元データを視認する視点と、3次元データを回転させる際の最大回転角である最大角度及び最小回転角である最小角度と、3次元データを回転させる際に中心軸となる回転中心軸とを決定し、回転中心軸を基準として前記3次元データを最小角度と最大角度の間で回転させた場合の複数の回転角度において、視点から3次元データを視認した場合における2次元データを、視覚化装置20によって複数作成し、表示装置21に複数の2次元データを表示する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
物品搬送装置
【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
ロボット及びその制御方法
【課題】簡易な構成により作業時の安定性を確保できるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、ロボット本体11、アーム12、台車13、センサ14を備える。アーム12は、ロボット本体11に連結され、関節機構及び伸縮機構のうち少なくともいずれか一方を有する。センサ14は、ロボット本体11の周囲に存在する物体を検知する。ロボット1は、アーム12が稼働する場合、台車13によりセンサ14が検知した物体に接近し、ロボット本体11の一部を当該物体に当接させる。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボット制御装置及びロボットの制御方法
【課題】仕切り板の配置にずれがあるパレットについても、手先との干渉を極力回避しながら作業を継続できるロボット制御装置を提供する。
【解決手段】ロボットの手先がパレットのマスの内部に挿入されると距離センサで検出される距離から周辺を囲む仕切り板の正規位置からのズレ量を検出し(S8)、パレットの外枠部分は予めフラグ「OK」を設定し(S1)、ズレ量が「ゼロ」,「マイナス」なら(S9:YES)当該仕切り板に隣接するマス側にフラグ「OK」を(S10)、ズレ量が「プラス」なら(S9:NO)当該仕切り板に隣接するマス側にフラグ「NG」を設定する(S11)。各マスのうちフラグ「NG」の設定がないものにつきフラグ「OK」の数を計算し(S2)、フラグ「OK」の数が「2」以上で最大のマスからワーク3の取出しを行ない(S6)、「2」以上のマスが存在しなければ(S4:NO)ワーク3の取出しを中止する。
(もっと読む)
バラ積みピッキング装置および方法
【課題】メッシュボックス等の容器にバラ積みされた複数のワークから、人による重量物のハンドリング作業なしにワークを1つずつピッキングすることができ、かつ容器内のワーク全体を高い位置精度で計測することができ、距離センサと容器及びワークとの干渉を無くすことができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置および方法を提供する。
【解決手段】ハンド14によりハンドに距離センサ16を取り付け(S1)、ハンドを移動して、距離センサ16によりバラ積みされたワーク全体の3次元形状データをハンド14で計測し(S2)、かつ計測した3次元形状データからハンド14で把持可能なワーク1の位置と姿勢を認識し(S4)、ハンド14によりハンドから距離センサ16を取り外し、ハンド14により把持可能なワーク1を順に把持して搬送先に搬送する(S6)。
(もっと読む)
ダブルアーム型ロボット
【課題】独立して2組の多関節アームの高さを変化可能なダブルアーム型ロボットを提供する。
【解決手段】第1及び第2の多関節アーム12、第1の多関節アーム11の一端が回動可能に連結される第1のアーム支持部16と、第2の多関節アーム12の一端が回動可能に連結される第2のアーム支持部17と、第1及び第2のアーム支持部17の第1及び第2の多関節アーム12と反対側の一端を鉛直方向に移動可能に保持しており、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12をそれぞれ回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12のハンド部23,33をそれぞれ回動させる第1及び第2の関節回動部と、第1及び第2のアーム支持部16,17を基柱14に対してそれぞれ独立して移動させる第1及び第2の上下駆動部とを備える。
(もっと読む)
マニピュレータ制御装置
【課題】物体表面に対してマニピュレータを適切に作用させる。
【解決手段】直線を含む曲線を有する物体表面上の複数点の位置測定を行う測定手段と、上記物体表面に物理的作用を施すマニピュレータと、上記測定手段による測定データを基に上記マニピュレータを制御する制御手段とからなる。物体表面上の任意の位置測定点の近傍の複数の位置測定点を用いて円弧近似を行う演算部を備え、該演算部は上記円弧近似を行う位置測定点の組合せを前記円弧近似の相関係数が最も高い組合せとして選択し、上記制御手段は演算部で演算された円弧近似によって得られる校正曲線を基にマニピュレータを制御する。
(もっと読む)
溶接マニピュレータ教示装置
【課題】レーザ光が照射された溶接ワークの撮像画像に基づく仮想ワイヤ距離Lを表示することで、溶接ワイヤの曲げ修正の手間をなくし、教示作業の精度向上、容易化を図る。
【解決手段】本発明に係る溶接マニピュレータ教示装置1は、溶接マニピュレータ2の溶接ノズル3に備えられる溶接ワイヤ4を溶接ワークWの溶接線Sに沿わす溶接動作を、溶接マニピュレータ2に教示する。溶接マニピュレータ2に、溶接ワイヤ4のワイヤ軸WJ方向又はこのワイヤ軸WJを横切る方向に沿ってレーザ光Kを溶接ワークWへ照射する投光器5と、投光器5のレーザ光軸LJを横切る方向からレーザ光Kが照射された溶接ワークWを撮像するカメラ6とを配備した光学機構7が設けられ、カメラ6の撮像画像Gと、撮像画像Gに基づいて計算された溶接ノズル3から溶接ワークWまでの仮想ワイヤ距離Lとを表示する表示手段8を有する構成となっている。
(もっと読む)
1 - 20 / 394
[ Back to top ]