
Fターム[3C007LT07]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 倣い制御 (34)
Fターム[3C007LT07]に分類される特許
1 - 20 / 34
加工ロボットの軌道追従装置と方法
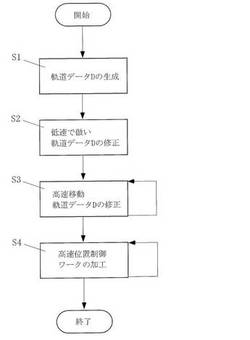
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの追従遅れなしに、高精度の加工をすることができる加工ロボットの軌道追従装置と方法を提供する。
【解決手段】(A)ワークのCADモデルから軌道データを生成して記憶装置に記憶し、(B)加工前に、軌道データに沿って、加工速度より低速の倣い速度で、ワークを加工することなくワークを倣い、その動作位置から軌道データを修正して目標軌道を設定し、(C)次いで、目標軌道に基づき、ワークと接触させることなく加工速度で加工工具を位置制御して、軌道データを再修正する学習を繰返して加工に使用する目標軌道データとして記憶し、(D)加工時に、学習後の軌道データに基づき、加工速度で加工工具を位置制御してワークを加工する。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
パワーアシスト装置
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
粗倣い制御を行うロボットの制御装置
【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
マニピュレータ制御装置
【課題】物体表面に対してマニピュレータを適切に作用させる。
【解決手段】直線を含む曲線を有する物体表面上の複数点の位置測定を行う測定手段と、上記物体表面に物理的作用を施すマニピュレータと、上記測定手段による測定データを基に上記マニピュレータを制御する制御手段とからなる。物体表面上の任意の位置測定点の近傍の複数の位置測定点を用いて円弧近似を行う演算部を備え、該演算部は上記円弧近似を行う位置測定点の組合せを前記円弧近似の相関係数が最も高い組合せとして選択し、上記制御手段は演算部で演算された円弧近似によって得られる校正曲線を基にマニピュレータを制御する。
(もっと読む)
溶接用ロボット
【課題】溶接用ロボットの姿勢を変更しても画像センサが邪魔にならないようにする。
【解決手段】溶接用ロボット1において、アーム部15の先端に手首部16を介して溶接ツール17を取り付ける。手首部16に移動手段26を取り付けると共に移動手段26を介して画像センサ25を取り付け、この移動手段26を、画像センサ25を溶接ツール17に対して移動させる構造とする。また、移動手段26を、画像センサ25を手首部16の軸芯に沿って移動させる構造とする。或いは、移動手段26を、画像センサ25を手首部16の軸芯回りに移動させる構造とする。移動手段26を、画像センサ25を手首部16の軸芯に対して垂直方向に移動させる構造とする。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながら加工する場合において、工具の切れ味が変化してもワークの加工寸法への影響が小さく、かつ工具の交換頻度を下げることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 外力を計測する力センサ15と、工具12と、工具を3次元空間内で移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。ワークの加工開始時(B)に、工具12の送りを停止して、所定の押付け力及び工具の動作速度で工具12をワーク1に押付け、工具12がワーク1に所定の深さまで切り込むまでの加工速度を計測する。次いで、ワークの加工時(C)に、前記加工速度から工具の送り速度、押付け力、又は工具の動作速度を補正してワーク1を加工する。また、工具が劣化し、加工速度が予め設定した限界加工速度に達したら、加工後に工具を交換する。
(もっと読む)
高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラム
【課題】 高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラムを提供すること。
【解決手段】制御装置600は、ロボットのワークの位置、姿勢、力制御値、およびモーメント制御値についての目標値を取得して格納する目標値格納部626と、目標位置および目標姿勢を読出し、切換え行列を適用して力を反映させ、さらに滑り摩擦や慣性力などの外力の除去を含む位置姿勢制御部628とを含み、自由空間と、拘束空間との間の制御力・運動の非干渉化を含む位置姿勢制御部628および力・モーメント制御部630とによって制御出力統合部634からロボットの関節に対する制御信号を生成させている。これらによって,高速高精度なロボットアームの点接触、線接触、面接触のすべての接触作業に適用する位置、姿勢、力及びモーメントの制御技術を提供する。
(もっと読む)
ロボット制御装置
【課題】ワーク形状を検出するセンサによって作業ツールを倣い補正するときに、進行方向に発生する位置誤差を抑制することができるロボット制御装置の提供。
【解決手段】予め設定された教示軌道および移動速度を入力として作業ツールTを移動させるための計画補間点Knを算出する補間点算出手段13を備え、ワークWの形状を認識するセンサLSからの入力に基づいて計画補間点Knを補正するための修正補間点Snを算出し、作業ツールTを修正補間点Snに順次移動させるロボット制御装置RCにおいて、補間点算出手段13は、作業ツールTが修正補間点Snに到達するたびに、教示軌道方向の移動量比率およびこの移動量比率に基づく修正移動速度を算出する。さらに、修正移動速度および教示軌道の残移動量を入力として計画補間点Knを再算出することによって、作業ツールTの進行方向に発生する位置誤差を抑制する。
(もっと読む)
ワーク加工装置とその制御方法
【課題】鋳鉄等の硬い材質のワークを加工する場合に、衝撃的な加工反力が発生しても加工精度を維持しかつ工具の破損等を防止することができるワーク加工装置とその制御方法を提供する。
【解決手段】3次元的に移動可能なロボットハンド4に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられワーク1の外面を倣う倣い部材15を有する倣い治具14と、倣い治具に取り付けられワークを加工する加工工具16と、倣い治具のワーク外面に対する倣い治具押付力Fallを予想される加工反力Rの最大値よりも大きい値に力制御する加工制御装置20とを備える。倣い部材14でワーク1の外面を倣いながら倣い治具14をワークの外面に沿って移動し、加工工具16によりワーク1を加工する。
(もっと読む)
ロボットの制御装置
【課題】
作業ツールが作業中にレーザセンサを利用する倣い有効区間と作業ツールが作業中にレーザセンサを利用しない倣い無効区間において、倣い有効区間では位置姿勢制御を行い、倣い無効区間では教示姿勢となるように姿勢制御の切替えができるロボットの制御装置を提供する。
【解決手段】
溶接ロボットの制御装置はワークの形状を認識するレーザセンサを備える。レーザセンサを利用する倣い有効区間では、センサの検出結果に基づく目標位置姿勢に基づいて位置姿勢倣い制御を行うロボット制御部RCを備える。ロボット制御部RCは、倣い有効区間に隣接する前記センサを利用しない倣い無効区間では、倣い無効区間の教示点における教示データに含まれる教示姿勢となるようにロボットの姿勢制御を行うとともに、倣い有効区間の終了点の実位置と、前記目標位置姿勢の位置との差に基づいて位置制御を行う第1位置姿勢制御を行う。
(もっと読む)
ロボット装置
【課題】ハンド部での多点接触による動作を可能とし、多点接触による押付力の力制御をより容易に行なうロボット装置を提供する。
【解決手段】アーム部20とハンド部30とアーム制御部200とを備えたマニュピレータ10において、ハンド部30は、掌部40と、指部50と、掌部40の押付力を検出するタクタイルセンサ42と、指部50の押付力を検出するタクタイルセンサ53と、指部50の掌部40に対する位置・姿勢を検出する力覚センサ51とを有し、アーム制御部200は、掌部40の押付力と、指部50の押付力と、指部50の掌部40に対する位置・姿勢とに基づいて、アーム部20の制御目標を設定する。これによりハンド部30における各種情報をフィードバックしてアーム部20の制御が行なわれ、ハンド部30での多点接触による動作を可能とし、多点接触による押付力の力制御をより容易に行なえる。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
エアチャック装置
【課題】内部に侵入した電解加工機の電解液等が結晶化して堆積してしまうことを抑制可能なエアチャック装置を提供する。
【解決手段】ハウジング10は、内部に可動部30および伝達部41、42を収容している。可動部30は圧縮空気の作用により往復に摺動し、摺動方向の駆動力は伝達部41、42によって所定方向の駆動力として把持部51、52に伝達される。把持部51、52はこの駆動力によって互いに近づく、または遠ざかるように移動し、間に対象物を把持する。ハウジング10は、外部から伝達部収容空間120へ霧状の水を供給可能な給水ポート20を備える。これにより、給水ポート20から供給する霧状の水によって内部への電解液の侵入を抑制し、電解液の結晶を溶解することができるので、電解液等が結晶化して内部に堆積してしまうことを抑制することができる。
(もっと読む)
ロボット設置方法及びロボット生産システム
【課題】専用の治具やツールを用意する必要がなく、短時間で高精度の教示作業を完了することができるロボット設置方法及びロボット生産システムを提供する。
【解決手段】ワーク40を含む領域の撮像を行い得られた画像に基づいてワーク40の位置を検出し、画像から検出されたワーク40の位置に応じて搬送ロボット30をワーク40に向けて移動し、搬送ロボット30によりワーク40を把持しようとしたときに搬送ロボット30の把持ハンドとワーク40とが当接した場合に搬送ロボット30が受ける力に基づく演算を行い把持ハンド32をワークに倣わせてワーク40に密着させてワーク40の位置を検出し、検出されたワーク40の位置に基づいて搬送ロボット30を制御する。
(もっと読む)
ロボット生産システム
【課題】専用の治具やツールを用意する必要がなく、短時間で高精度の教示作業を完了することができ、正確な位置合わせが不要となされ、生産ラインへの設置作業が容易であり、生産ラインへ設置した状態と生産ラインから外した状態との間を配置変更自在とすることができるロボット生産システムを提供する。
【解決手段】搬送ロボット30が配設された配置変更自在な第1の作業テーブルT1と、第1の作業テーブルT1を設置した際にこの第1の作業テーブルT1の位置の所定位置に対する位置ずれ量を検出する位置ずれ検出手段となるカメラ33と、カメラ33による検出結果に基づいて搬送ロボット30の動作の基準となる教示データを補正する位置ずれ補正手段となる制御部51を備えた。
(もっと読む)
シーラー塗布装置
【課題】アウターフランジ端の形状が変化してもシーラーノズルの位置を変更する必要がなく、ロボットのティーチング工数を低減できるシーラー塗布装置を提供する。
【解決手段】ヘミング加工されたアウターパネル11及びインナーパネル12のうちのアウターパネルの外縁であるアウターフランジ端14にシーラーを塗布する装置であって、ロボット5と、ロボットにフローティング機構4を介して取り付けられたシーラーガン3と、シーラーガンに取り付けられたシーラーノズル2と、シーラーノズルの位置決めをするための位置決めガイド6と、シーラーノズルの高さを調整するためのアジャストボルト10とを備えてなり、位置決めガイドがアウターフランジ端に沿って当接されながら移動する際に、シーラーノズルのセンター部が常にアウターフランジ端に位置するように位置決めガイドとシーラーノズルとが配置されている。
(もっと読む)
1 - 20 / 34
[ Back to top ]