
Fターム[3C007LT13]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 位置の補正 (291) | 慣性、重量、温度等を補償するもの (42)
Fターム[3C007LT13]に分類される特許
1 - 20 / 42
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
力制御ロボットのキャリブレーション装置と方法
【課題】ロボットの設置精度が低い場合でも、その設置誤差を考慮して、必要なパラメータをキャリブレーションすることができる力制御ロボットのキャリブレーション装置と方法を提供する。
【解決手段】3次元動作するロボットアーム1の手先に力センサ3を介してツール4が取り付けられている。ロボット制御装置14によりロボットアーム1を複数の姿勢に動作させて力センサ3の計測値と、前記計測値を取得するときの力センサの姿勢データとを取得し(S1,S2)、演算装置16によりツール重量、重力方向ベクトル、ツール重心位置ベクトルを含む複数のパラメータを算出する(S3,S4)。
(もっと読む)
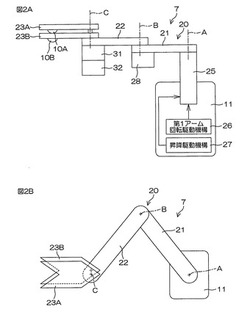
産業用ロボット
【課題】水平方向におけるハンドおよびアームの位置調整が可能であっても小型化することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向に移動可能に支持する柱状部材7とを備えている。柱状部材7は、支持部材6を保持する柱部18と、柱部18を保持する柱部17とを備えている。柱部17、18は、鉛直方向に対して互いに逆方向へ傾斜している。柱部18は、その傾斜方向への支持部材6の相対移動が可能となるように支持部材6を保持し、柱部17は、その傾斜方向への柱部18の相対移動が可能となるように柱部18を保持している。
(もっと読む)
ロボットアーム位置補正パラメータの同定装置及び方法、並びにそれを用いたロボットコントローラ及びロボット制御方法
【課題】ロボット個体毎に適用可能な、自動処理による簡便なロボット位置補正パラメータ同定方法及び装置を提供する。
【解決手段】本発明は、各関節部のモータと、モータに連結された減速機と、減速機に連結されるロボットアームとを備えるロボットにおいて、手先位置の軌跡誤差を補正するために、各モータへの角度指令に加算される補正値のパラメータを同定する装置であり、該モータへのトルク指令が最大となるリンク角度において最大値をとるトルク指令と同一周期の正弦波の位相に基づいて補正値の位相パラメータを同定し、且つ、同定された位相パラメータ及び任意の振幅パラメータを用いて計算される補正値と角度指令との合計に対する順運動学計算から得られるロボットの手先位置と現在の手先位置との差分につき動作時間内での積分値を計算し、該積分値が最小となる振幅パラメータを補正値の振幅パラメータとして同定する手段を備える。
(もっと読む)
位置制御方法、ロボット
【課題】ロボットのアームが変形する場合にもアームを位置精度良く制御する方法を提供する。
【解決手段】手部16の位置を制御する位置制御方法にかかわる。手部16の移動と手部16の移動量の検出とを並行して行い、手部16を目標とする場所に接近させる制御を行う第1移動工程と、手部16の移動と手部16が位置する場所の検出と目標とする場所の検出とを並行して行い、手部16を目標とする場所に移動させる制御を行う第2移動工程と、を有する。
(もっと読む)
ロボット制御装置
【課題】逆システムで演算のために用いられるイナーシャ値を、曲率半径の小さな弧状軌跡部分でも、軌跡精度を高くすることができるような値に定める。
【解決手段】曲率半径の小さな弧状軌跡に沿ってロボットが動作するとき、当該弧状軌跡を対象に、各アームのサンプリングタイム毎のイナーシャJa_nと、次のサンプリングタイムまでの移動距離d_nとを乗じて、その積の和を、各サンプリングタイムから次のサンプリングタイムまでの移動距離の総和で除した値を平均イナーシャ値Ja_aveとし、この平均イナーシャ値を用いて逆システムで修正目標位置を演算するようにしたので、軌跡精度が向上する。
(もっと読む)
ロボット装置
【課題】 低コストで信頼性が高く正確なロボット関節部におけるたわみ補正、力制御等ができるロボット装置を提供すること。
【解決手段】 基台側リンク1に備えた駆動モータ11を駆動制御する制御装置と、この駆動モータの動力を入力軸52、固定軸53、出力軸54の3要素を有する減速機5を介して先端側リンク2に伝達する関節部3を備え、この関節部3は、前記基台側リンク1に筐体が固定され、検出部で前記減速機5の入力軸52の角度情報を検出する第一エンコーダ12と、前記先端側リンク2に筐体21が固定され、検出部22で前記減速機5の入力軸52の角度情報を検出する第二エンコーダ23とを備え、前記制御装置は、前記第二エンコーダ23で検出した前記入力軸52の角度情報に基いて前記駆動モータ11を駆動制御するよう構成されている。
(もっと読む)
ロボットのオフライン教示装置、ロボットのオフライン教示方法、及びロボットシステム
【課題】マニピュレータ、周辺装置、ワークに重力たわみが発生してもオフライン教示段階で事前に補正する。
【解決手段】本発明に係るロボットのオフライン教示装置20は、与えられた全教示点Piについて、ロボットマニピュレータ11、周辺装置13,14、ワーク15の重力たわみを考慮した補正教示点P'(i)を算出するステップと、補正後の移動経路を計算するステップと、補正後の移動経路における重力たわみ量を算出して、経路途中で重力たわみ量が予め定められた許容値を超えた場合に、経路途中に新たな教示点を挿入するステップとを含む、教示点挿入処理を実行する。
(もっと読む)
搬送装置
【課題】搬送対象物を高い位置精度で搬送することが可能な搬送装置を提供する。
【解決手段】搬送装置1000は、ベース部4と、第1アームレバー5と、第2アームレバー6と、保持部7とを有する。第2アームレバー6と保持部7との間の関節部67には、第2アームレバー6に対して保持部7を3自由度で動かすことが可能なアクチュエータ100が設けられている。例えば、搬送装置1000は、アクチュエータ100を駆動させることにより、基板Wを、水平を維持したまま搬送することが可能である。このため、基板Wの位置精度を確保することができる。
(もっと読む)
ロボット制御装置
【課題】力覚センサを使用せずに、外力をより高精度に推定し、安定した力制御を実現できるロボット制御装置を提供する。
【解決手段】先端位置と位置指令値との誤差を算出する誤差算出部112と、誤差から関節角差分を算出する関節角差分算出部113と、関節角差分からトルク指令値を算出するトルク指令値算出部114と、アクチュエータ115の駆動トルクを推定する駆動トルク推定部107と、駆動トルク及びトルク指令値との差を外部トルクとして算出する外部トルク算出部108と、関節軸角度に基づいてヤコビ行列を算出するヤコビ行列算出部105と、ヤコビ行列及び外部トルクから外力を算出する外力算出部109と、コンプライアンスモデル及び外力から位置指令値に対する修正量を算出する修正量算出部110とを備える。
(もっと読む)
産業用ロボット
【課題】搬送対象物の重量が変動しても、ハンドに搭載される搬送対象物の傾きを適切に補正することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1は、搬送対象物2が搭載されるハンド3と、搬送対象物2が搭載されたときのハンド3の撓みによる搬送対象物2の傾きを補正する傾き補正機構17とを備えている。傾き補正機構17は、駆動源となる傾き補正用モータと、傾き補正用モータの出力軸に連結される偏心回転部材と、偏心回転部材に下端側が取り付けられるリンク部材と、リンク部材の上端側が取り付けられる取付部材とを備えている。傾き補正機構17は、偏心回転部材の回転に伴ってリンク部材とともに上下動する取付部材によって、支点部36を回動中心として搬送対象物2の傾きを変化させる方向にハンド3を回動させている。
(もっと読む)
アーム位置調整方法及び装置並びにロボットシステム
【課題】
アームのたわみ等による位置のずれをより精度良く解消できるようにした、アーム位置調整方法及び装置並びにロボットシステムを提供する。
【解決手段】
回転駆動するアクチュエータ20を有する関節部とこれに連結されるフレーム部材とを有するアームと、アクチュエータ20を制御する制御装置とを有するロボットにおいて、関節部の実際の角度を取得し、制御装置から関節部に与えられる指令角度と関節部の実際の角度とのずれ量を求め、アームの関節部に作用する関節トルクを求め、求めた関節トルクと求めたずれ量とに基づいて関節部のばね定数を算出し、算出したばね定数に基づいて、制御装置から関節部に与えられる指令角度を補正する。
(もっと読む)
医療用ロボット、および医療用ロボットのパフォーマンス要求事項を充足する方法
本発明は、医療用ロボット(R)、および医療用ロボット(R)のパフォーマンス要求事項を充足する方法に関する。ロボット(R)は、複数の軸(1〜6)と制御装置(17)とを有する。医療用工具(21〜24)は、ロボット(R)の取付装置(18)に取り付けられ、ロボット(R)の作業領域(30)は、そのロボット(R)がそれら医療用工具(21〜24)のパフォーマンス要求事項を充足するように、特に信頼度の高い技術で制御装置(17)によって設定される。 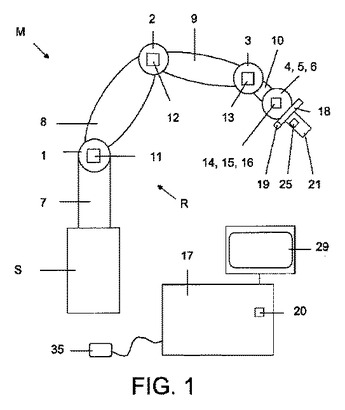 (もっと読む)
(もっと読む)
搬送用ロボットの制御方法
【課題】基板を載せる搬送用ハンドのズレ量を検出して、搬送用ハンドが基板を収納するカセット等の他の周辺機器に衝突したり、搬送用ハンド自身が破損することを未然に防止する搬送用ロボットを提供すること。
【解決手段】本発明の搬送用ロボットは、ワークを搬送するための搬送用ロボットの制御方法において、前記搬送用ロボットのアーム先端に配置される搬送用ハンドを備え、前記搬送用ハンドに取り付けられた加速度センサと、前記加速度センサに接続されたコントローラとからなり、所望の位置にワークを搬送するために、前記搬送用ハンドを移動させるときの加速度の設定値を前記コントローラに予め記憶させておき、実際に前記搬送用ハンドがワークを搬送するときの加速度と前記初期状態のときの加速度とを比較して、前記比較したときの加速度の差分をリアルタイムで検出して搬送用ハンドの位置を補正する。
(もっと読む)
マニピュレータシステム
【課題】高い自由度が得られ、操作者が先端動作部に加わる外力等をより確実に感知する。
【解決手段】マニピュレータは、トリガレバー32を含む操作部14と、エンドエフェクタ104、及びエンドエフェクタ104の向きを変えるヨー軸及びロール軸を含む先端動作部12と、操作部14と先端動作部12を連結する連結シャフト48とを有する。操作部14のアクチュエータブロック30にはヨー軸及びロール軸を駆動するモータ40及び41と、トリガレバー32の操作を機械的に伝達して、エンドエフェクタ104を駆動するグリッパ操作量補正部42が設けられている。コントローラ45は、ヨー軸及びロール軸の姿勢角度によるエンドエフェクタ104の干渉量を演算する。グリッパ操作量補正部42は、コントローラ45の作用下に、プッシュロッドを進退させ、干渉量を補償するようにトリガレバー32による操作量を補正する。
(もっと読む)
搬送ロボットシステム
【課題】簡易な構成で、アームのたわみによる教示位置のずれ量を補正できる搬送ロボットシステムを提供する。
【解決手段】ワークを載置保持するハンド12と、前記ハンド12を変位可能に構成されるアーム15・16と、前記ハンド12に対するワークの基準載置位置と実際の載置位置との差分を検出するアライメント装置と、前記アーム15・16の実際の位置と教示位置との差分を補正する教示位置補正手段と、を有する搬送ロボットシステムにおいて、前記ハンド12に備えられる加速度センサー24と、搬送過程において前記加速度センサー24によって検出される実加速度と予め指示された教示加速度との差分を算出する加速度差分算出手段と、を具備し、前記教示位置補正手段は、前記加速度差分に基づいて実位置を教示位置を補正する搬送ロボットシステム。
(もっと読む)
加工ロボットの制御装置
【課題】関節軸のたわみに影響されることなしに、ロボットの位置を正確に補正する。
【解決手段】加工ロボット(1)に取付けられたツール(18)の作用部(19)をワーク(20)に接触させてワークを加工するようにした加工ロボットの制御装置(10)は、ツールの作用部とワークとの間に作用する力またはモーメントを検出する検出手段(15)と、検出手段により検出された力またはモーメントを加工ロボットの関節軸の力またはモーメントに変換する変換手段(22)と、変換手段により得られた加工ロボットの関節軸の力またはモーメントに基づいて、加工ロボットの関節軸におけるたわみを算出するたわみ算出手段(25)と、たわみ算出手段により算出されたたわみを補償するように、加工ロボットの関節軸における位置指令または速度指令のうちの少なくとも一方を補正する補正手段(28)とを備える。
(もっと読む)
軌道走行式作業用機械の教示点補正装置
【課題】理論値の補正を教示作業者が行うことなく、またマニピュレータの手先に半導体センサを搭載することなく教示点の補正を可能にすることにある。
【解決手段】複数の軌道支持装置2により適宜の間隔を存して支持された軌道1を走行し、かつ作業機械制御装置9により制御される作業機械6の動作時における位置姿勢の教示点を補正する軌道走行式作業用機械の教示点補正装置において、軌道1を支持する各軌道支持装置2の軌道支持点に作用する外力及び変形を検出する検出装置7と、この検出装置7の検出情報と作業機械制御装置9より得られる位置情報を用いて位置姿勢補正量を演算し、この位置補正量により作業機械6の教示点を補正して作業機械制御装置9に与える位置姿勢補正装置10とを備える。
(もっと読む)
1 - 20 / 42
[ Back to top ]