
Fターム[3C007LT14]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 位置の補正 (291) | 内部状態によるもの(例;製作誤差) (50)
Fターム[3C007LT14]に分類される特許
1 - 20 / 50
6軸ロボットの軸間オフセット検出方法
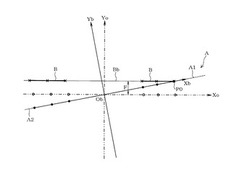
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
基板位置検出方法

【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
医療用マニピュレータ
【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
力制御ロボットのキャリブレーション装置と方法
【課題】ロボットの設置精度が低い場合でも、その設置誤差を考慮して、必要なパラメータをキャリブレーションすることができる力制御ロボットのキャリブレーション装置と方法を提供する。
【解決手段】3次元動作するロボットアーム1の手先に力センサ3を介してツール4が取り付けられている。ロボット制御装置14によりロボットアーム1を複数の姿勢に動作させて力センサ3の計測値と、前記計測値を取得するときの力センサの姿勢データとを取得し(S1,S2)、演算装置16によりツール重量、重力方向ベクトル、ツール重心位置ベクトルを含む複数のパラメータを算出する(S3,S4)。
(もっと読む)
ロボットシステムおよびロボット制御方法
【課題】
ロボットアーム先端の3次元空間の位置誤差および姿勢誤差を補正する。
【解決手段】
ロボットの動作領域内に予め定めた直方体領域について、オフラインにおける直方体領域の8頂点の理論座標値と、オンラインにおける前記8頂点の実測座標値とから、前記直方体領域内におけるオフラインでの座標値をオンラインでの座標値に補正する座標値補正係数を演算し、前記直方体領域内におけるオフラインでの姿勢をオンラインでの姿勢に補正する角度補正係数を演算し、前記直方体領域内のオフラインで教示された位置および姿勢を前記座標値補正係数と前記角度補正係数とを用いて補正し、補正した位置および姿勢を用いて前記ロボット先端の位置および姿勢を制御する。
(もっと読む)
ロボットの角度データ変換方法及びこの方法を実施するための制御装置
【課題】ロボット交換時におけるデータ設定の誤りを防ぐ。
【解決手段】交換前のロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換前ロボットの幾何学的誤差データを制御装置の主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換前ロボットのID情報とを照合し(S101)、次にロボットを制御装置から外して交換し(S102)、交換後ロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換後ロボットの幾何学的誤差データを主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換後ロボットのID情報とを照合し(S103)、交換前及び交換後のロボットの幾何学的誤差データを反映したツール先端位置間の誤差が十分小さくなるように動作プログラムに含まれる角度データを変換し、変換された角度データを含むように動作プログラムを上書き保存する(S104)、工程を備える。
(もっと読む)
ロボットの角度データ変換方法及び装置
【課題】 冗長自由度ロボットに対しても角度データを変換可能で、ツール先端位置誤差の補正と関節角度リミット回避や障害物回避との両立を可能とする。
【解決手段】
幾何学的誤差を各々考慮した交換前ロボット及び交換後ロボットのツール先端位置ベクトルを計算し(S301-303)、これらベクトル間の誤差ベクトルを計算し(S304)と、幾何学的誤差を考慮した交換後ロボットの角度データに対するヤコビ行列を計算し(S307)、誤差ベクトルとヤコビ行列の逆行列または擬似逆行列とに基づいて角度補正ベクトルを計算し(S308)、関節角度リミット回避及び障害物回避を考慮した評価関数を使って角度補正ベクトルを修正し(S309)、修正した角度補正ベクトルで交換後ロボットの角度データを補正する(S310)、各工程を備え、誤差ベクトルの絶対値(S305)が閾値未満となる(S306肯定判定)まで、処理を繰り返す。
(もっと読む)
水平多関節ロボットの座標値補正方法
【課題】高精度な水平多関節ロボットを実現する。
【解決手段】水平多関節ロボット10の座標値補正方法は、ガラスマスク80に設けられた基準マークP1,P2,P3位置をCCDカメラ40で画像認識して作用点の基準となるU軸中心を測定し、基準マークP1,P2,P3とU軸とが一致するまで第1アーム50と第2アーム60とを旋回させて、その移動量からロボット座標に対するガラスマスク80の傾きを算出し、ガラスマスク80の傾きを考慮して少なくとも2箇所の基準ロボット座標を算出し、前記基準ロボット座標に一致するまで前記U軸を旋回移動させてモデルポイントを作成し、そのときのロボット座標とモデルポイントとの座標差を算出し、この座標差を用いてアーム長誤差(ΔL1,ΔL2)と組み付け角度誤差(Δθ1,Δθ2)からU軸の座標補正値を算出し、座標補正値に基づきU軸の指令座標値を補正する。
(もっと読む)
ロボットの位置情報復元装置および位置情報復元方法
【課題】モータ交換等により無効となったセンサ信号による位置情報を容易に有効化する。
【解決手段】モータ駆動により支持部材31に対して回動可能な可動部材32を有するロボット1において、支持部材31と可動部材32との位置関係を表す視覚マーク30を設け、モータ交換の前後において、それぞれカメラ4により視覚マーク30を撮影するとともに、カメラ4からの画像信号に基づいてモータ交換の前後の視覚マーク30の位置関係が同一の位置関係となるようにサーボモータMを制御する。これらモータ制御後のセンサ信号に対応した軸角度θref-n,θref-n’に基づいて、モータ交換後のセンサ信号による軸角度θnを補正する。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
ロボットの関節機構の制御装置
【課題】ジンバルリンクを有するロボットの関節機構による動作を簡易なアルゴリズムで高精度に解析することができるロボットの関節機構の制御装置を提供する。
【解決手段】固定位置算出手段により、第1モータ191および第2モータ192のモータ角θ1およびθ2から、第1ロッド171および第2ロッド172の他端位置171b,172bを算出しておき、仮ロッド長算出手段12が、一端位置171a,172bの前回値を用いて、第1ロッド171および第2ロッド172の仮ロッド長L´を算出する。そして、ロッド不定位置決定手段16が、この仮ロッド長L´と実際のロッド長Lとの偏差であるロッド偏差ΔDを0に収束させることで、第1ロッド171および第2ロッド172の一端位置171a,172aを決定する。最終角度出力手段17が、一端位置171a,172aから、メインリンク150の姿勢角α,βや手180の姿勢角を算出して出力する。
(もっと読む)
非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置
【課題】測定対象物の位置・姿勢を直接測定して、精度の高い位置・姿勢の測定及び制御を可能にするとともに、測定対象物の位置・姿勢を非接触で測定することでモデル化を簡略にし、モデル化に起因した誤差を小さくすることを可能にした非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置を提供する。
【解決手段】エンコーダ10の位置検出器15と距離計16、17が取り付けられた測定装置2と、測定対象物9に取り付けられたエンコーダ10のスケール11とを備えてなる非接触型位置・姿勢測定装置Bを用い、距離計16、17によって位置検出器15とスケール11の間隔及び平行度を測定し、間隔と平行度が一定となるように測定装置2のマニピュレータ13を制御し、測定装置2の位置情報と距離計16、17の計測値とエンコーダ10の計測値とを用いて測定対象物9の位置と姿勢を測定する。
(もっと読む)
ロボットの精度調整方法およびロボット
【課題】ロボットの精度をその設置場所で調整する。
【解決手段】エンコーダが出力した信号値と、予め用意された該信号値と関節角度との対応関係とに基づいて制御されるロボットに対し、直交座標系を第1軸がリンクの回転中心線と一致するように定義し、該座標系の原点から距離DSのロボットの部分に第2軸方向の位置変化量を検出するセンサを取り付け、リンクを第2軸を基準として任意の角度回転させ、その後エンコーダの信号値EAを取得する。リンクを一方側に角度β回転させ、続いてリンクを角度−2β回転させ、角度−2β回転の開始から終了までのセンサが検出した位置変化量ΔPSを取得する。位置変化量ΔPS、距離DS、および角度βに基づいて、前記任意の角度の実際の角度αを算出し、角度αを関節角度θαに換算し、先に取得した信号値EAと関節角度θαとが対応関係になるように、前記信号値と関節角度との対応関係を修正する。
(もっと読む)
カッティングプロッタ
【課題】キャリッジを移動可能に支持するガイドレール等に曲がりが発生していても、当該曲がりによる切削加工の品質劣化を防止できるカッティングプロッタを提供する。
【解決手段】シート状の被加工媒体を支持する加工テーブルと、加工テーブルに支持された被加工媒体の上方に設けられ被加工媒体の切削加工を行うエンドミルと、加工テーブルの上方に設けられ、エンドミルを前後、左右、または上下に移動可能に支持するガイドレール31、Yバー32及び切削駆動機構と、エンドミルを前後、左右、または上下に移動させて被加工媒体を切削加工するように制御するコントロールユニット50とを備えたカッティングプロッタにおいて、ガイドレール31及びYバー32の曲がりを検出するキャリッジ形状測定機構100を備え、検出されたガイドレール31及びYバー32の曲がりに基づいて加工具の移動方向を補正する制御が行われる。
(もっと読む)
ワーク搬送ロボット
【課題】ロボット本体およびアーム相互間の成す角度を各々光学的に正確に検出することにより、最終的な搬送位置のズレを生じさせないようにしたワーク搬送ロボットを提供する。
【解決手段】ロボット本体と、該ロボット本体に対して順次関節部を介して相対回動可能に連接された複数のアームと、該複数のアームの先端側アームに相対回動可能に取付けられたリストブロックと、上記複数のアームの各々を回動作動する連係手段と、上記連係手段を所定の連係関係で駆動する駆動手段とを備えてなるワーク搬送ロボットであって、上記ロボット本体および複数のアーム間の各関節部には、ロボット本体およびアーム相互の相対的な回転角度情報を示す角度情報表示部42と、該角度情報表示部の角度情報を光学的に読み取る光学センサー51とを設け、上記各関節部の連結軸を介して相互に相対回動するロボット本体およびアーム相互の実際の回転角を検出できるようにした。
(もっと読む)
手術用マニピュレータ及び手術用マニピュレータシステム
【課題】 少ないアクチュエータの数でワイヤの張力調整を行うこと。
【解決手段】 手術用マニピュレータ11は、その先端側でピッチ方向に回転可能な支持体19と、ヨー方向にそれぞれ独立して回転可能となるように支持体19に支持された第1及び第2の先端プーリ21,22と、プーリ21,22にそれぞれ一体化された第1及び第2のブレード24,25と、第1のプーリ21に固定された第1及び第2のワイヤ51,52と、第2のプーリ22に固定された第3及び第4のワイヤ53,54と、第1〜第4のワイヤ51〜54を押し引きする第1〜第4のモータ56〜59とを備えている。第1及び第2のワイヤ51,52は、引張力が作用したときに、相反する方向に第1の先端プーリ21を回転させ、第3及び第4のワイヤ53,54は、引張力が作用したときに、相反する方向に第1の先端プーリ22を回転させる。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
ロボット及びその制御方法
【課題】ロボットの解体・点検作業を必要とするようなトラブルが発生する前に、ロボットの異常状態を検出すること。
【解決手段】本発明のロボットにおいては、ロボット制御手段40が、アーム駆動手段及び手首軸駆動手段を駆動してエンドエフェクタ25を所定の実位置に移動させ、エンドエフェクタ25が所定の実位置に到達した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出し、その検出結果に基づいて所定の実位置に対応する計測位置を算出して記憶し、異なる時点において取得された複数の計測位置の時系列データに基づいてロボットの状態を判定する。
(もっと読む)
位置補正装置、位置補正方法、位置補正プログラム及び位置補正システム
【課題】溶接トーチの位置ズレによる溶接ミスを防ぐことが可能な位置補正装置を提供する。
【解決手段】位置補正装置50は、溶接トーチ20を移動させるロボット10の駆動を制御し、溶接トーチ20の位置ズレを補正する装置であって、予め設定された補正基準位置座標に基づいてロボット10を駆動することによって、溶接トーチ20を補正基準位置に移動させるロボット制御部52と、検出装置40によって検出された、補正基準位置に移動した溶接トーチ20の座標が入力される座標入力部53と、入力された座標に基づいて、溶接トーチ20の位置ズレを補正する補正部54と、を備え、ロボット制御部52は、補正基準位置において、溶接トーチ20が実際に溶接を行う溶接姿勢と同一姿勢となるようにロボット10を駆動し、補正部54は、溶接姿勢における溶接トーチ20の位置ズレを補正する。
(もっと読む)
1 - 20 / 50
[ Back to top ]