
Fターム[3C007MS14]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 異常、危険発生後の処置 (116)
Fターム[3C007MS14]に分類される特許
1 - 20 / 116
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
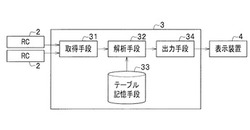
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
ロボット位置検出装置及びロボットシステム

【課題】移動中のロボットから検出される該ロボットの位置に対してその精度を高めることが可能なロボット位置検出装置及びロボットシステムを提供する。
【解決手段】位置算出部60は、トリガー信号が入力されるトリガー信号入力部61と、エンコーダーから出力された位置データが通信時間の分だけ遅れて入力される位置データ入力部62と、入力された位置データを取得してトリガー信号検出時におけるロボットの位置を算出するデータ処理部63とを備えている。データ処理部63は、トリガー信号が検出される前に取得した第1の位置データとそのタイミング、及び、トリガー信号が検出された後の第2の位置データとそのタイミングを用いてロボットの位置を線形補間し、トリガー信号が入力されたタイミングよりも通信時間だけ後の位置をトリガー信号検出時におけるロボットの位置として算出する。
(もっと読む)
ロボット制御装置、教示装置及びロボットシステム
【課題】
教示装置と通信が確立していないときに、障害が発生したロボット制御装置側から教示装置に対して通信確立を要求するため、複数のロボット制御装置の中から作業者が、障害が発生しているロボット制御装置との通信を迅速かつ正確に確立することができるロボット制御装置、教示装置及びロボットシステムを提供する。
【解決手段】
ロボット制御装置20の通信制御部22は障害が発生したときに、特定のティーチペンダント10と無線通信が確立していない場合、特定のティーチペンダント10に関する接続先情報を宛先にした通信確立要求を出力する。第3記憶部24cは返信された特定のティーチペンダント10に関する送信元の固有の送信元情報を記憶する。通信制御部22は通信確立要求応答があった後、送信元情報を宛先として、返信したティーチペンダント10に対して交信を行う。
(もっと読む)
ロボット制御装置及びロボット制御方法
【課題】主電源が停電した後に復旧した際に、簡便な制御で、ロボット本体が迅速に作業を再開できるようにする。
【解決手段】演算器は、ロボット本体の一連の作業を予め複数の作業区分に分割し、主電源の電力供給によって、順次、ロボット本体に作業区分毎に作業を実行させる(S21〜S25)。演算器は、主電源が停電したときに、補助電源の電力供給によって、複数の作業区分のうち、主電源が停電した時点での作業区分の作業を終えるまでロボット本体に作業を継続させる(S27)。演算器は、主電源が停電した時点での作業区分の作業を終えたときに、主電源の停電が復旧するまでロボット本体による作業を停止させる(S28)。演算器は、主電源の停電が復旧したとき、ステップS27の処理にてロボット本体に行わせた作業区分の次の作業区分からロボット本体に作業を再開させる(S30,S31,S22)。
(もっと読む)
連結移動装置
【課題】移動体が目標地点へ移動している途中で、バッテリー残量が低下しても、当該移動体が継続して移動できるようにする。
【解決手段】連結移動装置10は、不整地上を移動する複数の移動体3と、これらの移動体3を連結し電力を伝達可能な線状体5とを備える。複数の移動体3が、線状体5で連結された状態で移動する。各移動体3は、不整地上を移動するための移動手段と、給電されることにより該移動手段を駆動する駆動装置と、移動用エネルギーを蓄積し該エネルギーを用いて駆動装置に給電する給電装置と、を有する。各移動体3の給電装置は、他の移動体の給電装置から線状体5を介して電力を受けられるようになっている。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
組立ロボットとその制御方法
【課題】画像センサを用いずに、ワークと中間部材の嵌合状態を判断することができる組立ロボットとその制御方法を提供する。
【解決手段】外力を計測する力センサを有しワークを把持するロボットハンドと(S1)、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアームと、ロボットアームを制御しワークに嵌合された中間部材を対象物に嵌合させる組立作業を実行するロボット制御装置とを備える(S2)。ロボット制御装置により、組立作業中のワークの位置と計測された外力から組立作業の成功又は失敗を判断し(S3)、組立作業が失敗であるときに、ワークを組立作業前の位置へ戻し(S4)、次いで、中間部材が嵌合不能な固定部材5に対して固定部材を仮想的に対象物とみなして組立作業を再実行し(S5)、再実行中のワークの位置と計測された外力からワークと中間部材の嵌合状態を判断する(S6)。
(もっと読む)
ロボット
【課題】外部の物体への衝撃の緩和に起因するロボットの作業量の低下を抑制することが可能なロボットを提供する。
【解決手段】このロボット100は、第1アーム部13と、第1アーム部13に対して折れ曲がり可能に接続されている第2アーム部14とを含むアーム12と、第1アーム部13側に設けられ、第1アーム部13および第2アーム部14を含むアーム12を駆動するモータ11とを備える。そして、通常時には、第2アーム部14が第1アーム部13に対して折れ曲がらずに、アーム12が駆動されるとともに、外部の物体200と衝突した時には、第2アーム部14が第1アーム部13に対して折れ曲がり、第2アーム部14がアーム12の移動方向と逆方向に移動することにより、外部の物体200への衝撃を緩和するように構成されている。
(もっと読む)
ロボットアームの制御装置、制御方法、及び制御用プログラム
【課題】高価なセンサ等を用いることなく物体が挟まれた位置を正確に検出し、挟み位置に応じてトルクを最適に制御できるようにする。
【解決手段】関節角度の検出値θが目標値θrに追従するように生成される基本トルクT0に安全モータトルクプロフィールPsによる制限を適用することにより安全モータトルクTsを演算する。θに対するTsの変化に基づいてリンク機構21への物体の挟み込みを検出する。物体の挟み込みが検出された場合に関節部から物体までの挟み位置xを推定する。挟み位置xに応じてPsを設定する。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
産業用ロボットの回転関節用配線装置
【課題】ロボットの高速動作に良好に追随しつつ主配線の断線についての事前検出ができ、しかも断線原因の解明に有効に寄与できるようにする。
【解決手段】主配線14−1、14−2及び断線事前検出用配線14−3は、FPCから構成されている。断線事前検出用配線14−3は主配線14−1、14−2と厚み方向で並ぶように設けられ、主配線14−1、14−2よりも僅かに早く断線するように設定されている。さらにこの断線事前検出用配線14−3は反転部Tでの位置が主配線14−1、14−2より外側としている。この結果、主配線14−1、14−2に発生したマイクロクラックが該断線事前検出用配線14−3に拡大された形態で現出する。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
外力検出インタフェースの故障検知方法
【課題】エンドエフェクタを力覚センサで可動体に固定した外力検出インタフェースの力覚センサの故障を検出する方法を提供する。
【解決手段】剛性を有するエンドエフェクタ10が力覚センサ25、26によって可動体30に拘束され、エンドエフェクタ10に作用する外力が力覚センサ25、26の応答値から算出される外力検出インタフェースの力覚センサの故障検出方法であって、応答チャンネルの数が冗長性を有する力覚センサ25、26でエンドエフェクタ10を可動体30に拘束し、正常な力覚センサの応答値ベクトルが取り得る超平面に外力検出時の力覚センサ25、26の応答値ベクトルを拘束したときの超平面上の理論値と、当該応答値ベクトルとの偏差を求め、この偏差の大きさに基づいて、誤った応答値を応答する力覚センサのチャンネルを特定する。また、誤差を含むセンサ応答値から正しい外力を推定することもできる。
(もっと読む)
操作入力装置およびマニピュレータシステム
【課題】操作者が操作部を正常に操作できない状態となったときにそれを迅速に検知し、表示物の意図しない動きを防ぐ。
【解決手段】ディスプレイ4と、操作者Bの頭部Cに装着される頭部装着部5と、操作者Bの操作によりディスプレイ4上に表示された表示物2に対する操作信号が入力される操作部6と、頭部装着部5と操作部6との相対位置を検出する相対位置検出手段8,12と、該相対位置検出手段8,12によって検出された相対位置に基づいて、操作部6に入力された操作信号に従って表示物2の動作を制御する第1の制御モードと、操作部6に入力された操作信号に対して制限をかけて表示物2の動作を制御する第2の制御モードとを切り替えて表示物2を制御する制御部7とを備える操作入力装置1を提供する。
(もっと読む)
ロボットシステム
【課題】ロボット自体に異常がない状態でロボットを停止させた場合に、ロボットをその停止位置から所定の待機位置まで戻す動作を行う際における衝突のリスクを軽減する。
【解決手段】通常動作が行われる際、角度指令生成部27は、各モータMに対する回転角度指令を比較的短い生成周期毎に生成し、その生成した回転角度指令の一部を比較的長い出力周期毎に制御部26に出力する。角度指令記憶部28は、角度指令生成部27が生成した回転角度指令の全てを順次記憶する。遡り動作が行われる際、角度指令生成部27は、角度指令記憶部28に記憶されている回転角度指令を新しいものから古いものへと順に読み出すとともに、それら読み出した回転角度指令を遡り角度指令として出力周期毎に出力する。制御部26は、各軸の回転角度を遡り角度指令に一致させるようにモータMによる各軸の駆動をフィードバック制御する。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
ロボットアームおよびその修復方法
【課題】 人と協調して作業するロボットアームで、安全確保した上で、ロボットアームを小型化できるようにする。
【解決手段】 熱可塑性樹脂マトリックス部による硬質なロボットアーム表層部に検知対象物が近接することを出力電圧変化として検出し、この出力電圧のレベルによってロボットアーム表層部を加熱軟化させ、検知対象物と接触した際の安全を確保する。
(もっと読む)
ロボット制御装置
【課題】 ロボットの停止制御をなるべく維持しつつ、ロボットを予め定めた時間内に確実に停止させることができるロボット制御装置を提供する。
【解決手段】ロボット2の動作速度を検出する速度検出器16a,24と、ロボット2の動作を制御するロボット制御器12と、ロボット制御器12がロボット2の停止制御を開始した後、速度検出器16a,24で検出されたロボット2の速度と第1所定時間で最高速度から0へ減少する比較速度とを比較する速度比較器16cと、速度比較器16cによる比較の結果、ロボット2の速度が比較速度を超えた場合に、ロボット2への電力供給を遮断する電力供給遮断器16d,18とを備えている。
(もっと読む)
ロボット制御システム
【課題】 簡単な構成で、ティーチング作業時の安全性の確保を長期間維持することができるロボット制御システムを提供する。
【解決手段】電力供給スイッチ16は、複数のロボット2a,2b,2cのそれぞれを動作させる複数のサーボアンプ11a,11b,11cに電力供給する共通の電源供給路4に設けられ、複数のサーボアンプ11a,11b,11cへの電力供給を一括して実行又は遮断する。複数の監視ユニット13a,13b,13cは、ロボット2a,2b,2c毎に設けられ、当該ロボット2a,2b,2cの動作を監視する。監視ユニット13a,13b,13cは、選択器14で選択されなかったロボット2a,2b,2cが動作したことを検出した場合に、電力供給スイッチ16に全てのサーボアンプ11a,11b,11cへの電力供給を一括して遮断させる。
(もっと読む)
1 - 20 / 116
[ Back to top ]