
Fターム[3C007NS03]の内容
マニピュレータ、ロボット (46,145) | ワークの状態 (1,085) | 作業対象物が移動するもの (132) | 回転/揺動台によるもの (43)
Fターム[3C007NS03]に分類される特許
1 - 20 / 43
ピッキング用部品供給装置、および部品ピッキング装置
【課題】
部品供給装置に多数の部品を山積み状態でストックしても、容易かつ確実に部品の山積み状態を変えることが可能な山積み部品供給装置を提供する。
【解決手段】
前記収容容器の底面を構成する容器底部と、収容容器の壁面を形成する円筒形状であって、当該円筒形状の軸を回転軸として前記容器底部に対して相対回転可能な収容容器本体と、前記前記収容容器本体に所定の回転動作をさせる容器本体駆動部と、を備えた。
(もっと読む)
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ

【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
ロボット制御装置
【課題】マニピュレータA、BおよびポジショナPを並行起動して、2パスのアーク溶接作業を実行させるロボット制御装置において、教示データをマニピュレータAとポジショナPの組合せ、またはマニピュレータBとポジショナPの組合せにより独立して作成する場合、一方の教示データに対して教示点の編集操作を行ったときに他方の教示データにも同様の編集操作を行う必要がある。
【解決手段】教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された複数の制御対象を教示対象として設定する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。教示データ自動修正部9は、一方の教示データに対する編集操作が行われたときに、編集操作の内容に応じて他方の教示データを自動的に修正する。教示工数の低減及び教示ミスの防止が期待できる。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
回転板位置調整装置及び方法
【課題】構造が簡易で、回転板の微小変位に対応可能な、回転板位置調整装置及び方法を提供する。
【解決手段】吸着搬送装置51と認識カメラ7と制御装置10とを備えた回転板位置調整装置50において、上記吸着搬送装置に備わり回転板2の吸着動作を行う吸着ヘッド1は、ヘッド本体101と、上記回転板を吸着する金属製の吸着パッド102と、上記ヘッド本体と上記吸着パッドとを接合し、かつ上記回転板の姿勢に上記吸着パッドが倣うように変形する接着部103とを備えた。
(もっと読む)
ポジショナを備えたロボットシステム
【課題】本発明では、ロボットとポジショナを用いてフットプリントを小さくするロボットシステムを提供する。
【解決手段】作業対象物10と、前記作業対象物10に対して作業するロボット5、6と、前記作業対象物10を位置決めするポジショナ7、8とを備え、前記ポジショナ7、8の枠体24上に前記ロボット5、6を備えたものである。
(もっと読む)
揺動装置
【課題】モータの質量に関わらず、応答性の高い揺動装置を提供する。
【解決手段】揺動装置10は、ベース12と、揺動テーブル14と、複数のリンク機構20と、当該リンク機構20を駆動するモータ26と、リンク機構20と揺動テーブル14との間に介在する連結部材と、を備える。リンク機構20は、モータの駆動に応じて、その上端位置がリンク機構面内で変化するものの、リンク機構面の位置およびリンク機構面の角度は不変である。連結部材は、スライド機構22と、X,Y,Z軸回りの回動を許容する回転ジョイントと、を有しており、揺動テーブル14がリンク機構20に対して回動およびスライドすることを許容する。そして、かかる構成とすることで、モータ26をベース12に固定設置(位置固定)することが可能となる。そして、結果として、リンク機構20、ひいては、揺動装置10の応答性を向上することができる。
(もっと読む)
ロボットのオフライン教示装置、ロボットのオフライン教示方法、及びロボットシステム
【課題】マニピュレータ、周辺装置、ワークに重力たわみが発生してもオフライン教示段階で事前に補正する。
【解決手段】本発明に係るロボットのオフライン教示装置20は、与えられた全教示点Piについて、ロボットマニピュレータ11、周辺装置13,14、ワーク15の重力たわみを考慮した補正教示点P'(i)を算出するステップと、補正後の移動経路を計算するステップと、補正後の移動経路における重力たわみ量を算出して、経路途中で重力たわみ量が予め定められた許容値を超えた場合に、経路途中に新たな教示点を挿入するステップとを含む、教示点挿入処理を実行する。
(もっと読む)
溶接線選定方法
【課題】溶接線候補を含む多くの線分から構成される3次元CADデータに基づいて、溶接線を迅速に抽出する。
【解決手段】溶接線作成方法は、溶接線を形成する部材の2面のうち、基準となる面(第1の面)を指定するステップ(S110)と、溶接線を形成する部材の2面のうち、他方の面(開先面である第2の面)を指定するステップ(S120)と、稜線を抽出するステップ(S130)と、溶接可能となる稜線区間を選択するステップ(S140)と、溶接可能な稜線を統合し溶接線情報を作成するステップ(S150)と、開先形状に応じて、溶接線情報を修正するステップ(S160)とを含む。
(もっと読む)
位置補正装置、位置補正方法、位置補正プログラム及び位置補正システム
【課題】溶接トーチの位置ズレによる溶接ミスを防ぐことが可能な位置補正装置を提供する。
【解決手段】位置補正装置50は、溶接トーチ20を移動させるロボット10の駆動を制御し、溶接トーチ20の位置ズレを補正する装置であって、予め設定された補正基準位置座標に基づいてロボット10を駆動することによって、溶接トーチ20を補正基準位置に移動させるロボット制御部52と、検出装置40によって検出された、補正基準位置に移動した溶接トーチ20の座標が入力される座標入力部53と、入力された座標に基づいて、溶接トーチ20の位置ズレを補正する補正部54と、を備え、ロボット制御部52は、補正基準位置において、溶接トーチ20が実際に溶接を行う溶接姿勢と同一姿勢となるようにロボット10を駆動し、補正部54は、溶接姿勢における溶接トーチ20の位置ズレを補正する。
(もっと読む)
結び目をつくるロボット装置およびその制御方法
【目的】2つの作業用アームの二次元平面内における動きのみで結び目をつくる。
【構成】回転テーブル40上に広げた包装用シートS上に被包装物Oj を置き,被包装物をシートSでくるんでできる2つの緒部を2つの作業用アームで把持して起立させ,かつ若干内側に寄せて近づけ,その状態で回転テーブルを回転させて交差部をつくり,一方の緒部先端を交差部下方の通し空間に挿入し,両緒部先端を互いに離れる方向に引っ張ることにより,結び目が形成される。
(もっと読む)
溶接制御装置、その溶接制御方法および溶接システムならびに溶接制御プログラム
【課題】鉄骨構造物の溶接の際、溶接ロボットと鉄骨構造物との衝突が発生せず、オペレータの安全性が確保されると共に、溶接作業の自動化が可能となる溶接制御装置、その溶接制御方法および溶接システムならびに溶接制御プログラムを提供する。
【解決手段】溶接装置1を制御するために用いられる溶接制御装置8において、あらかじめ登録された複数の計測プログラムのパターンの中から、鉄骨構造物の形状に応じた計測プログラムを選定し、選定された計測プログラムを溶接装置1に送信する計測プログラム選定手段8Aと、送信された計測プログラムによってセンサ7で計測された計測データを受信し、その計測データの検出位置の座標を変換して鉄骨構造物の寸法データを算出するデータ算出手段8Eと、寸法データに基づいて、あらかじめ登録された溶接プログラムを修正し、修正された溶接プログラムを溶接装置1に送信する溶接プログラム修正手段8Fとを備える。
(もっと読む)
顕微鏡用観察装置
【課題】試料とマニピュレータとの相対的な位置を変えることなく、試料が載置されている試料台を容易に移動することが可能な顕微鏡用観察装置を提供すること。
【解決手段】顕微鏡用観察装置10は、少なくとも一つの可動軸を有する基台20と、基台20上に配置され、かつ基台20の有する可動軸と異なる少なくとも一つの可動軸を有する試料台30とを有する。試料を操作するためのマイクロマニピュレータ50を、連結部材40を介して基台20に取り付けて、基台20の可動軸による動作をマイクロマニピュレータ50の動作と連動させるとともに、試料台30の可動軸による動作をマイクロマニピュレータ50の動作と連動させないようにした。
(もっと読む)
オフライン教示データの作成方法及びロボットシステム
【課題】ロボット、特に当該ロボットを搭載したスライダの適切な教示データを自動的かつ効率的に作成する。
【解決手段】ロボットの据付ベースを移動させるスライダを動作させながらワークに対して連続した作業を行なうロボットシステムにおいてスライダ位置を決定する方法は、初期位置等を設定するステップ(S100〜S103)と、ロボット原点を通る探索平面内にて離散的に設定された格子点が、ワーク上の作業位置に合致するようにスライダの位置を設定して、そのスライダの位置における各格子点の評価値を算出するステップ(S106)と、評価値が最高値である格子点が溶接点になるように、スライダの位置を決定するステップ(S109)とを含む。探索平面は作業位置を中心として回転させることで、最適なスライダの位置を設定できる。
(もっと読む)
ロボットの教示方法
【課題】ロボットとポジショナの同期を行う溶接等の作業の教示において、適切なポジショナ同期の教示点を自動的に作成する。
【解決手段】ポジショナ2の動作開始位置から動作終了位置までの動作時間を予め求めるポジショナ2の動作を含む区間におけるワーク100に対する作業速度からポジショナ動作に要するワーク100に対する作業軌跡の長さを求める(S2−5)。ポジショナ2の動作開始位置から前記動作終了位置までのワーク100に対する作業軌跡の長さが、ポジショナ動作に要する作業軌跡の長さ以上となるような連動開始位置及び連動終了位置を設定する(S2−6)。
(もっと読む)
ロボット洗浄装置
【課題】複雑な形状の被洗浄物であっても効率よく洗浄及び乾燥が可能なロボット洗浄装置を提供する。
【解決手段】先端に高圧液体及び高圧気体を噴射する噴射装置111を有するロボットアームと、被洗浄物61を支持する支持冶具12Bと、支持冶具12Bを回転させる支持冶具回転モータ13と、噴射装置111及びロボットアーム11及び支持冶具回転モータ13の動作を制御する制御部17と、を備え、制御部17が入力されたプログラムに従ってロボットアーム11と噴射装置111と支持冶具回転モータ13の動作を制御して被洗浄物の洗浄と乾燥とを行う。
(もっと読む)
産業ロボットシステムにおける複数軸の制御方法および産業ロボットシステム
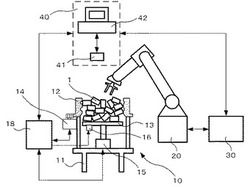
本発明は、ロード領域およびプロセス領域を含む作業セルと、人がロード領域に入ったときを検出する検出器(6)と、作業セル内に位置するマニピュレータと、工作物を保持するとともに、マニピュレータが工作物を加工する間に少なくとも1つの軸周りで工作物の方向を変化させるように構成されている少なくとも1つのポジショナと、1つの軸周りで可動であるとともに、コマンドを受け取ると、マニピュレータまたはポジショナをロード領域とプロセス領域との間で移動させるように構成されているステーション交換器とを備える産業ロボットシステムに関する。各軸にはモータ(M1−M3)と駆動ユニット(53−55)とが設けられる。軸コントローラ(50)は、ポジショナおよびステーション交換器の軸に停止を命令する第1のタスクと、ポジショナおよびステーション交換器の軸の動きを可能にする第2のタスクとの間で実行を切り換えるように構成されている。安全コントローラ(58)は、人がロード領域に入っていることを検出すると、ステーション交換器またはポジショナが動いているかどうかを監視するとともに、監視される軸のいずれかが動いていることが検出される場合、動いている軸の駆動ユニットを使用不能にする信号を生成するように構成されている。 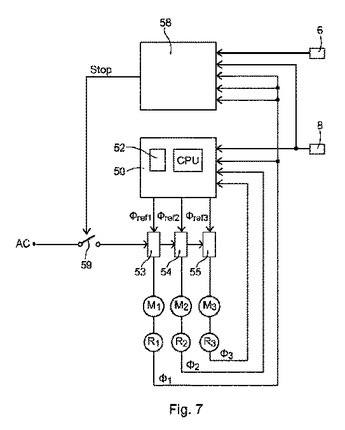 (もっと読む)
(もっと読む)
部品取出し設備
【課題】部品点数が少なく簡便な構造をもち、設備の信頼性が高く、設備費用を抑えることができる部品取出し設備を提供する。
【解決手段】部品台車11に、回転可能に回転支柱27を立て、この回転支柱27に部品棚28を設け、回転支柱27を回すことにより、取出し対象の部品をロボット16に臨ませ、部品Wをロボット16で取出すようにした部品取出し設備において、部品台車11に、ロボットアーム22の先端を係止する第1係止部31が設けられ、回転支柱27又は部品棚28に、ロボットアーム22の先端を係止する第2係止部32、32が設けられ、第1係止部31により部品台車11を移動させ、第2係止部32、32により回転支柱27を回転させるようにした。
(もっと読む)
作業装置
【課題】簡潔な機構で小型電子機器などの組立作業に適した作業装置を提供する。
【解決手段】パラレルリンク型機構部1のベース5に設けられた3つのアクチュエータ6により、平行リンク機構11を介して可動部10を駆動する。ベース5に設けられた回転型アクチュエータ7により、伸縮自在の伝達シャフト17を介して可動部10に設けた回転軸16を駆動する。基台3には直交する2軸の回りに回動し、ワークを取り付ける2軸傾斜テーブル部2を有する。回転軸16にエンドエフェクタ19を取り付ける。パラレルリンク型機構部1で可動部10の位置を制御し、2軸傾斜テーブル部2でワークの姿勢を変えて、ワークに対するエンドエフェクタに対する位置、姿勢を制御する。可動部は軽量である。又、エンドエフェクタはワークに対してその姿勢を大きく変化でき、回転できるから、ねじる動作も可能となり小型電子機器の組立作業が容易となる。
(もっと読む)
1 - 20 / 43
[ Back to top ]