
Fターム[3C030CC01]の内容
自動組立 (6,729) | 輸送機械の組立・分解 (611) | 自動車 (578)
Fターム[3C030CC01]の下位に属するFターム
艤装物品の車体への組付 (164)
車体搬送設備 (28)
艤装物品の組立 (292)
Fターム[3C030CC01]に分類される特許
41 - 60 / 94
構造物組立て制御方法および構造物組立て制御装置
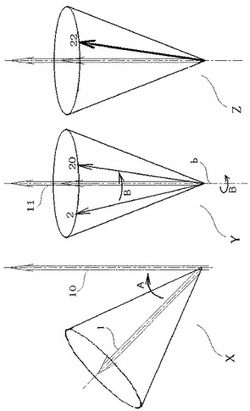
【課題】建造物・移動体(自動車・船舶・航空機)といった構造物の自動組立て、宇宙空間でのドッキングやステーションなどの宇宙構造物建設にて、時間短縮や組合せ部材同士の衝突・干渉をさける適切かつ有効な組立て制御技術を提供する。
【解決手段】構造部品姿勢データのベクトルが同一直線にない第1姿勢ベクトル1、10、第2姿勢ベクトル2、20で、結合する2つの構造部品姿勢データのベクトル的な差を減ずる方向に一方の構造部品を移動A、Bし結合させて組み立てる。その制御ステップにて、第1ベクトル11を軸とした回転Bによる移動制御を行う構造物組立て制御技術。
(もっと読む)
ワーク着座検知装置とそれを用いたロケート装置およびワーク着座検知方法

【課題】光電センサタイプのワーク着座検知装置と同等の機能を有しながらも、そのコストダウンを図ったワーク着座検知装置を提供する。
【解決手段】下端に近接センサ34のヘッド部34aを臨ませたガイドチューブ37の上端にドッグ38を上下動可能に支持させるとともに、ガイドチューブ37内に検知プレート40を上下動可能に配置し、検知プレート40の上下に互いに拮抗する圧縮コイルスプリング41,42を配置する。検知プレート40のストロークS2はドッグ38のストロークS1よりも小さく設定してある。ドッグ38にワークが当接することによりそのドッグ38の動きに検知プレート40を追従変位させて、ドッグ38に対するワークの着座を近接センサ34にて間接的に検知する。
(もっと読む)
車種切替用部材自動装着装置
【課題】小さい力で簡単・確実に磁石を切離し得るようにする。
【解決手段】直線的に移動することにより、車種切替用部材12を脱着位置から装着位置へと反転させる切替用部材反転装置21を設けると共に、切替用部材反転装置21に、車種切替用部材12と磁石18との磁気吸着保持状態を解除可能な機械的増力装置38を取付けるようにしている。
(もっと読む)
組立ライン制御システム
【課題】組立ライン制御システム、特に自動車組立ラインの保管・ロット制御システムを提供する。
【解決手段】組立ライン制御システム、より具体的には、車両組立ラインの保管・ロット制御システムが開示されている。製造組立ラインに通信ネットワークが重ねられる。この組立ラインは、いくつかのリーダと処理ステーション104を組込んで、リーダと処理ステーションのすぐ近くを通過する車両のID、および車両のビルド・インストラクション、ステータス、位置、条件、欠陥と修理の履歴などを決定し、確認する。この情報は、コンピュータデータベースに格納される。これらの車両、在庫ステータス、生産スケジュールなどに関して格納された情報に基づいて、製造プロセスを通る車両のルーティングが決定され、実施される。
(もっと読む)
自動嵌合方法及びそれを用いた回動量調整方法、回動量調整装置
【課題】車両のホイールアライメント調整などを行うに際し、ソケット等により構成される嵌合部の、カムボルト等により構成される被嵌合部に対する位置ずれを広い範囲で吸収(許容)することができるとともに、シンプルな構成により装置の軽量化・省スペース化・低コスト化を図る。
【解決手段】嵌合部を有するツール10(嵌合部材)を、自動的に動作するロボット3(移動手段)により、前記嵌合部が弾性変位可能となるように支持し、ツール10をロボット3によって移動させることにより、前記嵌合部をカムボルト2(被嵌合部材)の被嵌合部に嵌合させる自動嵌合方法であって、ロボット3による動作は、前記嵌合部を、前記被嵌合部に付勢当接させた状態で、前記嵌合部の前記被嵌合部に対する嵌合方向に垂直な面である移動面上にて、前記弾性変位を含め略円状あるいは略楕円状の探り軌跡を描くように移動させる探り動作を含む。
(もっと読む)
移動するワークピース用の加工システム、及び該加工システムを位置決めするための方法
加工システム(10)が、産業用ロボット(16)によって、移動するワークピース(12)の加工を行い、産業用ロボット(16)を、ワークピース(12)及び/又は移動可能なワーク担持ユニット(14)に一時的に固定結合させることができ、産業用ロボット(16)は、非結合動作位置(42)で、能動的に作用する駆動ユニット(20)によってワークピースとは無関係に移動させることができる担持デバイス(18)によって担持され、結合動作位置(44)で、浮動軸受システム(22)によって、担持デバイス(18)に対して浮動に取り付けられる。この場合、駆動ユニット(20)は、産業用ロボット(16)の結合動作位置(44)では、担持デバイス(18)に対して能動的に作用せず、担持デバイス(18)は、産業用ロボット(16)が結合されているとき、浮動軸受システム(22)により、移動するワークピース(12)及び/又は移動するワークピース担持ユニット(14)によって少なくとも一時的に付随移動されるものとする。さらに、対応する加工システム(10)の、移動ワークピース(12)に結合させることができる産業用ロボット(16)に関する位置決め方法が提供される。 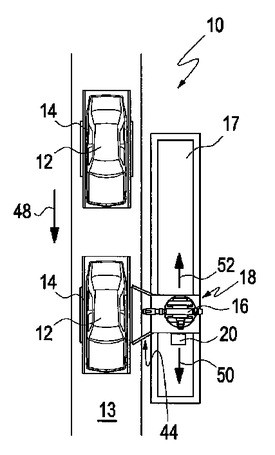 (もっと読む)
(もっと読む)
部品ピッキングシステム及び部品ピッキング方法
【課題】部品のピッキング効率を向上させる。
【解決手段】無人搬送車1の走行経路4は、ピッキングエリア内においてループ状に設定される。部品棚21〜25は、複数の組立ラインそれぞれに対応して複数、備えられると共に、ループ状の経路4の外周囲に配置される。部品を組立ラインに送るための卸位置21b,22b,25bは、ループ状の経路上に、複数の組立ラインそれぞれに対応して設定される。無人搬送車1のループ状の経路を、各組立ラインへの部品供給状況に応じて、少なくとも1の部品棚及び卸位置を通過する経路を含む別のループ状の経路4a,4b,4cに変更する走行経路変更手段を備える。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】ワークの種類が増えた場合でも作業者による手作業をすることなくワークの移し替え作業を容易に行うことができ、且つサイクルタイムを最小に抑えることのできるワーク移し替え装置を提供する。
【解決手段】第1エリアA1に第1のパレット4A〜4Dと第1ハンドリングロボット1を配置し、第2エリアA2に第1のパレット4E〜4Hと第2ハンドリングロボット2を配置すると共に、これら第1エリアA1と第2エリアA2の間に第2のパレット5Bを配置する。そして、何れかのロボット1が第2のパレット5Bにワーク3A〜3Hを移し替える際に、そのロボット1に向けて第2のパレット5Bを回転させるようにする。一方のロボット1による第2のパレット5Bへの移し替えが終了したら、他方のロボット2に向けて第2のパレット5Bを回転させる。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】作業者による手作業をすることなくワークの移し替え作業を自動化すると共に作業エリアを省スペース化することのできるワーク移し替え方法を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレット4A〜4Hからハンドリングロボット1にて所定のワーク3A〜3Hを取り出した後、組み立て生産順番となるように第2のパレット5A〜5Cに移し替えて順次配列させる作業を繰り返し行うワーク移し替え方法において、2以上の第1のパレット4A〜4Hを配置させた回転テーブル2A〜2Dを、ハンドリングロボット1がアクセスし得るエリアの周囲に複数配置し、その回転テーブル2A〜2Dを回転させて取り出すべき所定のワーク3A〜3Hが配置された第1のパレット4A〜4Hを、ロボット側に向けて配置させた後に、前記ワーク取り出し手段11で所定のワーク3を取り出す。
(もっと読む)
同期搬送装置
【課題】設備投資の低減を図ることができ、かつ高精度の取り付けが可能な同期搬送装置を提供する。
【解決手段】同期搬送装置1は、オーバーヘッドコンベア2の下方に設けられ、ハンガ5の軌道に平行して延びる搬送路6と、ワーク3に対して所定の製造作業を行う作業機43を搭載し、オーバーヘッドコンベア2の搬送速度に同期して搬送路6上を走行する同期搬送台車7とを備え、同期搬送台車7が、ハンガ5に支持されたワーク3の下方に位置したとき、ワーク3底部の搬送方向の前後側の何れか一方におけるハンガ5の支持状態を維持して他方を押し上げ且つその押し上げ位置のワーク3底部を着座させて支持する着座手段44を備えた。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】ワークの種類が増えた場合でも作業者による手作業をすることなくワークの移し替え作業を容易に行うことのできるワーク移し替えシステムを提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレット4A〜4Hから第1,第2ハンドリングロボット1,2にて所定のワーク3A〜3Hを取り出した後、組み立て生産順番となるように第2のパレット5A〜5Cに移し替えて順次配列させる作業を繰り返し行うワーク移し替えシステム。ワークの種類が増えた場合、第3ハンドリングロボット22と、この第3ハンドリングロボット22がアクセスする複数台の第1のパレット4I〜4Lと、ロボット2,22間に配置されるワーク仮置き台6Bをパッケージ23として追加する。ワーク3の種類がさらに増えた場合は、パッケージ23をさらに追加することで対応する。
(もっと読む)
ピッキングランプ装置
【課題】 従来のピッキングランプ装置を用いたままでも利用可能であり、作業者Bのストレスを解消できると共に指示ランプを消すためのスイッチング動作の要らない作業工程数を減少させたピッキングランプ装置を提供する。
【解決手段】 部品取出し指示ランプ4の点灯により取出すべき部品を指示可能なピッキングランプ装置1において、外部からの指示により点灯する指示ランプ4を設けると共に、指示ランプ4の点灯を解除可能な光電センサー3を設けてなる装置本体1と、指示ランプ4の点灯を解除させるよう光電センサー3を作動させる反応手段5とからなる。
(もっと読む)
ワーク搬送装置及びワーク搬送装置におけるワーク把持方法
【課題】適正な力でワークをクランプすることができるワーク搬送装置を提供する。
【解決手段】図(a)において、作業者は第1レバー47を図反時計方向に回す。ドライバ部材46が反時計方向に回されたため、下部ローラ45は上昇する。この結果、(b)に示す下部ローラ45は第4カム溝39から離れる。歯部はラックに完全に噛み合った状態を維持する。このため、想像線で示す第2スライダ27は左右に移動する心配はない。(a)で、位置決めされた第2スライダ27を支点にして、上部ローラ44でカムプレート33を図左へ強制移動させる。
【効果】後部把持部材を確実にドアに押し付けることができる。挟持したドアに、揺れや加減速に起因する水平力が作用したとしても、後部把持部材がずれる心配がないため、ドアを確実に且つ安定して搬送することができる。
(もっと読む)
生産管理システム及びその方法
【課題】部品情報の二重登録を防止して、製造物の部品情報をより正確に管理できるシステムを提供することを目的とする。
【解決手段】生産工程2で製造物3に組み付けられる部品4を製造物3と関連付けて管理する生産管理システム100であって、前記部品4の部品情報を入力し、入力された部品情報P1等の製造物情報をデータベース74に記憶して、製造物3の個体情報を示す識別情報ごとに格納し、部品情報が入力された際に、同一の部品情報が前記データベース74に既に記憶されているか否かを検索して、入力された部品情報P1と同一の部品情報が、前記データベース74に既に記憶されていると判断された場合に、入力された部品情報P1及び/又はデータベース74に既に記憶されている部品情報P2の正誤確認を指示し、その結果に基づいて、誤入力された部品情報を修正して正しい部品情報を入力するように構成する。
(もっと読む)
ワーク位置決め装置およびワーク位置決め方法
【課題】コストを削減でき、省スペース化が可能なワーク位置決め装置およびワーク位置決め方法を提供する。
【解決手段】ワーク位置決め装置1は、複数のワークの中の少なくとも1つの第1ワークW1に対する保持位置を変更可能な、NC制御される多軸のNC軸を有する第1ワーク位置決め機構4A、4Bと、複数のワークの中の第1ワークW1と異なる少なくとも1つの第2ワークを保持し、保持された第2ワークを、第1ワーク位置決め機構4A、4Bに保持された第1ワークW1に対して位置決め可能な構造を有する第2ワーク位置決め機構5と、を有する。
(もっと読む)
ラックカバーの取付構造
【課題】ラックカバーをラックの側面に取り付ける際に、ラックに対して新たな取付用のねじ孔などの取付部の追加工を不要とする。
【解決手段】ピニオン43に噛み合うラック40をラックレール41に取り付ける際の位置決めを行うノックピン207を、ラック40の貫通孔40eおよびラックレール41の位置決めピン挿入孔41bに挿入し、ノックピン207の端部にねじ孔207aを設ける。ラック40は、ラックレール41に対し、ラック40内に頭部を埋め込んだ六角穴付ボルトにより固定する。ラック40の側部表面に、ラック40とピニオン43との噛み合い部211を覆うラックカバー203を被せる。ラックカバー203は、ノックピン207のねじ孔207aを利用して皿ねじ209で固定する。
(もっと読む)
加工ステーションと車体を製造する方法
【課題】車体タイプの簡単に場所と時間を節約する転換や僅かな構成公差による車体部材の接合を可能とする柔軟な取付けステーションを自由に使用できること。
【解決手段】交換可能な張り枠を備える固定ステーションと、非使用時には交換可能な張り枠がその中にしまわれ、使用時には交換可能な張り枠が取り出される少なくとも1つの張り枠マガジンと、交換可能な張り枠が張り枠マガジン用の輸送手段としての少なくとも一つのロボットとを備えて、加工ステーションと異なるタイプの車体を製造する。交換可能な張り枠、特に車体側面部材用の張り枠は、複数の独立したセグメント張り枠に分割され、この際に他の車体タイプへ転換するために、それぞれ一つのセグメント張り枠がロボットにより固定ステーションから張り枠マガジンへ輸送され、そのマガジンにしまわれ、他のタイプのセグメント張り枠を張り枠マガジンから取り出され、固定ステーションへ輸送される。
(もっと読む)
ワーク搬送装置
【課題】ハンドと固定治具の間でワークの双方向の受け渡しが容易に可能なワーク搬送装置を提供する。
【解決手段】本発明に係るワーク搬送装置1は、ワークWに設けられるロケート孔5に挿入可能であって、進退動可能な固定治具用ロケートピン6を有する固定治具2と、前記ロケート孔5に前記固定治具用ロケートピン6が挿入される側の反対側から挿入可能であって、進退動可能なハンド用ロケートピン8を有し、前記固定治具2に対して移動可能なハンド4と、前記ハンド4にワークWを保持するための保持手段11と、前記固定治具用ロケートピン6およびハンド用ロケートピン8を選択的に進退動させる選択手段と、を有することを特徴とする。
(もっと読む)
ガラス位置決め供給方法及びその装置
【課題】ガラス板の位置決め作業を軽減してガラス板の搬送や供給を効率良く行うことができ、しかも、構造を簡単として飛躍的なコストの低減が可能となるガラス位置決め供給方法及びその装置を提供する。
【解決手段】大略矩形状のガラス板Wを起立状態で位置決めし且つガラス板Wを出し入れ自在に支持するガラス支持手段8を備える移動自在のガラス保持台4に、ガラス板Wを投入して保持させる。続いて、ガラス板Wを位置決め支持したガラス保持台4を、所定のガラス供給位置Bに移送手段5により移送する。次いで、移送されたガラス保持台4を、所定のガラス供給位置Bにおいて保持台固定手段6により停止させて解除自在に固定する。
(もっと読む)
ガラス保持装置
【課題】ガラス板の位置決め作業を軽減してガラス板の搬送や供給を効率良く行うことができ、しかも、構造を簡単として飛躍的なコストの低減が可能となるガラス保持装置を提供する。
【解決手段】ガラス板Wを起立状態で収容するフレーム2と、フレーム2の底枠2aに設けられて起立状態のガラス板Wをその一側縁が下方となるように傾斜させてガラス板Wの下縁を支持する第1支持手段3と、フレーム2の起立する一側枠2bに設けられてガラス板Wの一側縁を支持する第2支持手段4とを備える。第1支持手段3は高低差を有して配設されてガラス板Wの下縁に当接する複数のローラ部材5,6を備え、第2支持手段4はガラス板Wの一側縁に当接するローラ部材11を備える。各ローラ部材5,6,11はガラス板Wの端縁が挿入自在の支持溝5a,6a,11aが全周に形成されている。
(もっと読む)
41 - 60 / 94
[ Back to top ]