
Fターム[3C030CC03]の内容
自動組立 (6,729) | 輸送機械の組立・分解 (611) | 自動車 (578) | 艤装物品の車体への組付 (164) | ドア、ガラス、天井 (46)
Fターム[3C030CC03]に分類される特許
1 - 20 / 46
ドア治具
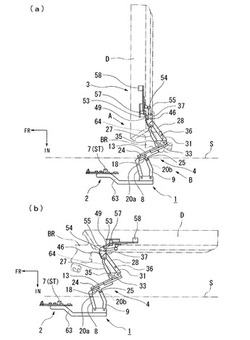
【課題】スライドドアを車体に対して各種作業に適した状態で位置決め保持可能とし、かつ搬送ライン周辺の作業スペースの縮小を図ることができるドア治具を提供する。
【解決手段】第一アーム8及び第二アーム9の一端は、車体側ベース部2のブラケットに回動軸を異にして回転自在に接続され、第一アーム8及び第二アーム9の他端は、ピボット部材13の一側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の一端は、ピボット部材13の他側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の他端は、ヒンジ部材37に回転軸を異にして回転自在に接続され、スライドドア側ベース部3は、ヒンジ部材37に連結軸46を介して回転自在に支持される。
(もっと読む)
成形天井材用接着剤塗布装置

【課題】設置面積を縮小することができる、成形天井材用接着剤塗布装置を提供する。
【解決手段】接着剤塗布ステーション4において、成形天井材2の下端部が保持機構12に保持されるとともに、成形天井材2の他方面2Bが第1支持部材25に支持されることにより、成形天井材2は、他方面2B側に傾倒した姿勢に配置される。そして、その状態で、塗布ロボット3により、成形天井材2の一方面2Aに接着剤が塗布される。その後、保持機構12による成形天井材2の保持が解除されるとともに、第1支持部材25による成形天井材2の支持が解除されると、成形天井材2は、その下端部が接着剤塗布ステーション4に残ったまま、自重により左側にさらに傾倒して、第2支持部材28にもたれ掛かる。その後、押圧部材30により、成形天井材2の下端部が接着剤塗布ステーション4から搬出ステーション5に移動される。
(もっと読む)
加工システム及び加工方法
【課題】組み付け部品の破損を防止すること。
【解決手段】把持機24が取り付けられたロボット23は、ロアサッシュ32を把持し、当該ロアサッシュ32をドア31まで移動させる。締め付け部25が取り付けられたロボット22は、ボルトをドア31まで移動させ、ドア31及びロアサッシュ32の各々に設けられたボルト穴にボルトを挿入して締め付ける。ロボット制御装置12は、ロボット22,23のうち少なくとも一方の動作の制御として、ロアサッシュ32がドア31に当接した当接状態になった後に、ロアサッシュ32とドア31との所定の関係が一定に保たれる倣い制御、具体的には力覚センサ64により検出される押し付け量が一定に保たれる倣い制御を実行する。
(もっと読む)
組付治具を備える治具装置
【課題】治具装置において、組付対象物に組み付けられる物品の組付位置の設定精度の向上を図り、かつ治具装置の設計の自由度を大きくする。
【解決手段】位置決め部材20,30は、回動中心線L1,L2を中心に回動可能に基台10に設けられ、位置設定部材40,50は、基準点P1(,P2)に対応する基準点対応部位Q1,Q2を有するスケール43,53と、基準点対応部位Q1,Q2に当接するダイヤルゲージ47,57とを備える。基準点対応部位Q1,Q2は、回動中心線L1,L2を中心とすると共に回動中心線L1,L2と基準点P1(,P2)との距離を半径とした仮想円上に位置する。ダイヤルゲージ47,57は、基準点対応部位Q1,Q2に当接した状態で回動中心線L1,L2を中心に回動する位置決め部材20,30の回動位置を変更可能である。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
組立て装置
本発明は、車両ボディ(14)を加工するための産業ロボット(24)を備える組立て装置(20)に関する。この産業ロボット(24)は、車両ボディ(14)に接続することによって、コンベヤベルト(12、18)が車両ボディ(14)を送る搬送方向(16)に一緒に移動することができる。この産業ロボットは、どのような搬送状況においても、全ての方向でワークピースに対して正確な位置を保っている。輸送プラットフォーム(22)は産業ロボット(24)の輸送に用いられ、産業ロボット(24)が車両ボディ(14)から連結解除されている場合、この輸送プラットフォーム(22)は搬送装置(12、18)とは無関係に、レール接続なしに移動可能である。好ましくは、輸送プラットフォーム(22)に構成部品リザーバを接続することができ、それによってこの構成部品リザーバは輸送プラットフォーム(22)によって一緒に動かされる。この産業ロボット(24)は特に小さな積載量で設計できることから、低コストの組立て装置(20)が実現可能である。 (もっと読む)
ワーク取付け装置
【課題】ワークを車体に自動で取付けることができるワーク取付け装置を提供することを課題とする。
【解決手段】ワーク取付け装置10は、センサ180で検出した開口171の端部172とルーフガラス151の端部173との位置ずれ量、及びセンサ190で検出した開口171の端部181とルーフガラス151の端部182との位置ずれ量に基づき、制御手段200でルーフガラス151の位置及び姿勢を修正するために回転機構60及び移動機構110を制御する。
【効果】車体11の端部とルーフガラス151の端部との位置ずれが自動で解消された後、ルーフガラス151を車体11に取付ける。したがって、ルーフガラス151を車体11に自動で取付けることができるワーク取付け装置10を提供することができる。
(もっと読む)
車両のドアハンドリング治具および車両のドアハンドリング方法
【課題】本発明は、1つの治具で、ドアをドア搬送装置から車体の所定位置に搬送することを可能にする車両のドアハンドリング技術を提供することを課題とする。
【解決手段】車両のドアハンドリング治具20は、治具本体31に傾動自在に設けられドアの下端部36を受ける第1ワーク受け部40と、治具本体31からドアの下方へ挿入可能に設けられ、第1ワーク受け部40が待機位置へ移動されたときに第1ワーク受け部40に代わってドア13を受ける第2ワーク受け部43と、治具本体31に傾動自在に設けられ、ドアの車両長手方向の位置決めをなす長手位置決め部46と、ドアの側部37を車両の幅方向で挟むドアクランプ部51と、ドア13を吸着保持する吸着パッド52と、を備えている。
(もっと読む)
自動車ルーフ組付装置
【課題】従来のルーフ組付装置では、4車種以上の多車種に対応できない問題点や、生産過程によるバラツキのためルーフ位置を微調整しなければならない課題があった。
【解決手段】自動車ボディにルーフをセットするルーフセットマテハンロボット2と、接合部溝幅計測用ガイド10及び接合部溝幅計測用センサー11を備えた複数のルーフ位置決めロボット1と、ルーフ位置決めロボット制御装置4と、スポット溶接ロボット3とを有し、複数のルーフ位置決めロボット1の各々の接合部溝幅計測用センサー11は、複数の接合部溝Mの幅溝を、それぞれの接合部溝幅計測用ガイド10との間で計測し、幅溝の測定値をルーフ位置決めロボット制御装置4に送信し、順次この方法を繰り返すことでルーフを適正な位置にセットしてからスポット溶接ロボットによってルーフとボディを溶接する自動車ルーフの組付装置による。
(もっと読む)
ドア建付け方法及びヒンジ締結構造
【課題】作業者による手作業での建付けに頼ることなく誰にでも簡単且つ短時間でドアを車体に対して建付け可能とする。
【解決手段】ボルト42とナット43が固定されたボルトプレート44をフロントドア7のヒンジ取付け部40の一面40bに設け、ヒンジ取付け部に形成した貫通孔41A、41Bを通して各ボルトを他面40a側へ突出させ、他面側からヒンジ取付け部に貫通する孔部53を通してボルトプレートのナット43にロックボルト45を螺合してボルトプレートをフロントドアに仮止めし、ボルトの先端をボディー1に固定したヒンジ8に設けたボルト取付け孔52に挿入し締結ナット54で締結する。そして、複数の貫通孔のうち1箇所の貫通孔41Aを基準孔とし、それ以外を逃がし孔として、基準孔に貫通するボルト42を中心軸とし、ドアサッシュ部を固定基準としてフロントドアを建付けた後、ロックボルトを本締めしてボルトプレートを固定する。
(もっと読む)
ドア取り外しシステムおよびドア取り外し方法
【課題】ドアをボディから確実に取り外しできるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステムは、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステムは、ドア11を把持して搬送可能な双腕ロボットと、ナットランナ71と、双腕ロボットおよびナットランナ71を制御する制御装置と、を備える。制御装置は、双腕ロボットによりドア11を把持し、ナットランナ71のソケットをボルト12に嵌合して、ナットランナ本体によりソケットを所定回転数だけ回転させ、ソケットの後退距離xを測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。
(もっと読む)
車両パネル部品の組付方法及び組付治具
【課題】投資コストを抑制しつつ、作業者への負担を軽減することのできる車両パネル部品の組付方法を提供する。
【解決手段】搬送ライン7を搬送される車体6に、各車両ドア3、4を組付治具12a、12bを介して接触させて、各車両ドア3、4を車体6の搬送速度に同期させながら搬送して組み付けるので、投資コストを抑制しつつ、作業者への負担を軽減することができる。
(もっと読む)
ワーク取付システムおよびワーク取付方法
【課題】汎用性が高くかつサイクルタイムを短縮できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、第1取付ロボット5と、第2取付ロボット6と、これらを制御する制御装置7と、を備える。制御装置7は、第1取付ロボット5のCCDカメラにより、サンルーフ部材3の位置およびインナパネル2Aの位置を位置情報として算出する工程と、この位置情報に基づいて、第1取付ロボット5によりサンルーフ部材3を把持して搬送し、このサンルーフ部材3をインナパネル2Aに位置決めする工程と、第1取付ロボット5によりサンルーフ部材3をインナパネル2Aに仮固定する工程と、既に算出した位置情報に基づいて、第2取付ロボット6によりサンルーフ部材3をインナパネル2Aに本固定する工程と、を実行する。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
ワーク艤装方法及びワーク艤装設備
【課題】ドア艤装作業にロボットを導入することができる技術を提供することを課題とする。
【解決手段】ドアの艤装設備10は、メインコンベア12と、このメインコンベア12で搬送される台車13と、メインコンベア12に平行に配置されるサブコンベア15と、メインコンベア12上のドアをサブコンベア15の入口16へ移動する第1の移載装置51と、サブコンベア15に臨んで配置され、サブコンベア15上のドア14に艤装を施すロボット50と、サブコンベア15の出口17から艤装が施されたドア14をメインコンベア12へ戻す第2の移載装置52とからなる。
【効果】通常はロボット50でドアの艤装を実施する。ロボット50に異常が発生したときにはメインコンベア12上で人手で艤装を行う。ロボット50に異常が発生しても、ドアの艤装作業を継続することができる。そのため、安心してロボットを導入することができる。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
吸着装置
【課題】小型で騒音の小さい吸着装置を提供する。
【解決手段】モータ200と、モータ200に入力端が連結されたクランク機構300と、シリンダ400と、吸気室505に通じる吸気路504が形成されており、吸気路504の端部に、吸気室505内の負圧が作用すると開放され、正圧が作用すると閉鎖される吸気用チェック弁502を有するシリンダヘッド500と、クランク機構300の出力端に連結されてシリンダ400内を上下動するピストン603によってシリンダヘッド500の吸気室505内の圧力を変化させる構成とされており、ピストン603に形成された排気路613の端部に、吸気室505内の負圧が作用すると閉鎖され、正圧が作用すると開放される排気用チェック弁602を有するダイヤフラムポンプ600と、シリンダヘッド500に設けられたバキュームパット700と、を備えている。
(もっと読む)
バックドア組付装置およびバックドア組付方法
【課題】同一の組立ラインにおける2種以上の車種の混流生産に対応して、車種ごとに異なる形状のバックドアを対応する車両に組み付けることができるバックドア組付装置を提供する。
【解決手段】本発明のバックドア組付装置20は、組立ラインを移送される車両4にバックドア10を組み付けるために用いられるバックドア組付装置であって、助力装置21、組付治具31、および接続手段25を有する。助力装置21は、組立ラインを移送される車両4に同期して移動する。組付治具31は、バックドア10に装着され、当該バックドア10の車種ごとの形状差を吸収する、接続手段25は、バックドア10に装着された組付治具31の共通部位32を助力装置21に着脱可能に接続する。
(もっと読む)
ウインドシールド取り付け装置及び使用方法
車両のウインドシールドを交換する際に技術者1人で使用するためのウインドシールド取り付け装置である。装置は、車両の側窓に貼り付け可能な第1組立体と、車両に設置されようとしているウインドシールドに貼り付け可能な第2組立体を含んでいる。第2組立体は、第1組立体に連結し、第1組立体に対して軸回転するように適合されている。 (もっと読む)
ボルト取り外し方法
【課題】ボルトの最大締め付けトルクがナットランナの最大出力トルクを超えた場合でも、このボルトを取り外すことができるボルト取り外し方法を提供すること。
【解決手段】ボルト取り外し方法は、ロボットアーム33と、このロボットアーム33の先端に取り付けられたナットランナ71と、を有する単腕ロボットにより、ドアに取り付けられたボルトを取り外す。このボルト取り外し方法は、ナットランナのソケット711をボルトに嵌合させる手順と、ナットランナ71のソケット711を中心としてロボットアーム33を回動させることにより、ボルトの締め付けトルクのうち高トルク範囲を弛緩させる手順と、ナットランナ71を駆動して、ボルトの締め付けトルクのうち低トルク範囲を弛緩させる手順と、を備える。
(もっと読む)
1 - 20 / 46
[ Back to top ]