
Fターム[3C269SA19]の内容
Fターム[3C269SA19]に分類される特許
21 - 40 / 56
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
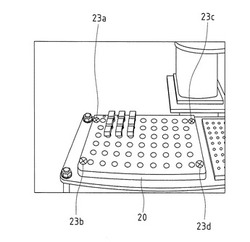
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
ロボットティーチング装置

【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワーク、スポット溶接ガン及び多関節ロボットの剛性に依存することなく、溶接ワークの対向電極側表面位置を正確に検出する。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガンの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、可動電極を溶接ワーク表面に接するように位置決めした後、サーボモータで可動電極を対向電極に接近させる方向に移動させると同時に、多関節ロボットを用いて対向電極と溶接ワークとを接近させる方向に同じ速度で相対移動させながら、可動電極の移動速度及び加速度の少なくとも一方を監視することにより、対向電極と溶接ワークとの接触を検出し、このときの対向電極の位置から溶接ワークの対向電極側表面位置を検出する。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
加工制御装置、レーザ加工装置およびレーザ加工システム
【課題】加工ヘッドの適切な移動速度を短時間で設定できるとともに加工不良を低減することができる加工制御装置を得ること。
【解決手段】レーザを照射することによりワークの3次元レーザ加工を制御する加工制御装置において、ワーク上に設定される加工位置でのワークの面方向と加工ヘッドの加工ノズル方向とがなす角度に基づいて、加工位置での角度に応じた加工ヘッドの移動速度を加工位置毎に設定する移動速度設定部33と、設定された移動速度に従ってワークへの制御指示を出力して3次元レーザ加工を制御する制御指示部35と、を備える。
(もっと読む)
ロボットの制御装置
【課題】ロボット座標上での位置および姿勢を計算しなくとも、実際のロボットの動作時に、教示点を通過する移動軌跡を生成でき、しかも、アームがひっくり返るといった事態を避けるためのロボットの形態チェックをしなくとも済む。
【解決手段】各アームの軸値(回転角)が決まればロボット先端の位置および姿勢は一義的に定まる。これにより、実際にロボットを動作させる際に、前もって連続移動軌跡を求め、求めた連続移動軌跡上の各点のアームの回転角を、教示点でのアームの回転角と比較して教示点に最も近い近傍点を探索する。近傍点が教示点から離れていた場合、教示点を補正し、補正後の教示点を用いて再度連続移動軌跡を軸値で求める。実際にロボットを動かすときには、軸値で求めた連続移動軌跡によりロボットの動作を制御する。
(もっと読む)
プログラム作成・教示装置及び方法
【課題】複雑な流れを持つロボットプログラムであっても、短時間で位置データの教示が可能なプログラム作成・教示装置及び方法を得ること。
【解決手段】作成したロボットプログラムを解析して、その中で使用される位置変数を抽出する工程(ステップS11)と、抽出した位置変数の中から、値を教示する必要のある位置変数を教示対象変数として選出する工程(ステップS12)と、ロボットプログラムの処理の流れに基づいて、教示対象変数を使用する命令が実行される順序に応じたグラフ構造で教示対象変数を配列させる工程(ステップS13)と、教示対象変数の教示受付時に、グラフ構造での配列に従って教示対象変数を順次表示する工程(ステップS14)とを有する。
(もっと読む)
ロボットのオフライン教示方法
【課題】ティーチングデータの作成を容易とするロボットのオフライン教示方法を提供する。
【解決手段】ロボットのオフライン教示方法は、複数の仮想教示点を設定するステップ(STEP2)、始点と終点とを含む一部の仮想教示点において仮想ツールの姿勢を設定するステップ(STEP3〜7)、一部の仮想教示点間の補間動作を実行するステップ(STEP8)、補間動作実行時の仮想ツールの位置及び姿勢を所定間隔毎に補間動作点として記憶するステップ(STEP9)、他の仮想教示点毎に、記憶された補間動作点のうち所定の選択基準を満たす補間動作点を選択するステップ(STEP11,12)、他の仮想教示点毎に、選択された補間動作点の姿勢データを読込み、読み込んだ姿勢データを他の仮想教示点の姿勢データとして記憶させるステップ(STEP13〜16)を有する。
(もっと読む)
ロボットツールの制御方法
【課題】ロボットシステムを制御する方法は、ロボットシステムの移動可能な機構に支持されたツールを用意する工程と、ホルダに支持されたワークを用意する工程と、ワークの画像を生成する工程と、該画像から、ワークの特徴に関するデータを抽出する工程と、該画像から抽出されたデータを用いて、ワークに沿った連続的3次元経路を生成する工程と、該経路に沿ってツールを移動させる工程と、を含む。  (もっと読む)
(もっと読む)
ロボットシステム
【課題】組立嵌合作業の教示の負担を軽減すると共に、嵌合作業の精度を向上させ作業を効率化でき、教示作業時と再生運転時の環境の変化に対するロバスト性を上げることが可能なロボットシステムを提供する。
【解決手段】ロボットコントローラ102は、暫定的に教示されたワーク把持点および嵌合点、ワーク把持点と嵌合点との間の経由点の各位置と、ワーク把持点および嵌合点におけるエンドエフェクタ104の姿勢と、ロボット101周辺に存在する障害物の位置とから障害物を回避して嵌合を行う作業プログラムを生成し、教示データ記憶部1023に記憶させる姿勢演算部1024を備える。
(もっと読む)
ロボット装置及びロボット装置教示方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び傾きのずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、マニピュレータ1の所定箇所を作業台102上に設けられた位置基準部7に当接させ合致させることによって、位置合わせのための教示動作を行う。
(もっと読む)
作業ロボットと、ティーチング方法
【課題】作業ロボットを設置する作業の効率の低下を抑制し、効率よくティーチングできる、作業ロボット及びティーチング方法を提供することを課題とする。
【解決手段】ロボットアーム10に装着される溶接機20aを、ワークWkに対して作業可能な位置に配置したときの溶接トーチ24のヘッド位置情報をコントローラ30に教示する。そして、コントローラ30は、教示されたヘッド位置情報を、ワークWkの作業部位を示す作業位置情報として、ティーチングデータを作成することを特徴とする作業ロボットとした。
(もっと読む)
産業用ロボットの位置教示装置、動作プログラム作成装置、産業用ロボットの位置教示方法およびプログラム
【課題】容易且つ直感的に位置情報を教示することができる産業用ロボットの位置教示装置を提供する。
【解決手段】位置教示装置の画面上で、組立工程の単位であるセルリスト71から任意のセルベースを、配置図表示領域53にドラッグアンドドロップすると、そのセルベース10に対応した配置図が生成され表示される。次に、ロボットの移動目標となる「接続ユニット」や「給材ユニット」などのユニットをユニットリストから配置図の候補配置点にドラッグアンドドロップすると、そのユニットイメージが前記配置図に重畳して表示される。これを繰り返してユーザによるロボットを用いたセルのレイアウト設計がなされる。最後に、ユニットの位置情報を伴うデータを位置教示装置から産業用ロボットに送信することで、各ユニットの位置情報を教示する。
(もっと読む)
ロボット制御装置
【課題】円弧経路を形成している教示点を修正する際に、手動操作に適した座標系を自動的に設定して操作を容易にする。
【解決手段】操作手段からの方向指示入力に従ってロボットに取り付けた作業ツールTを移動させて円弧経路Kを形成する教示点A〜Cを位置修正するロボット制御装置において、作業ツールTの現在位置Dから円弧経路Kの中心軸線Krに対して垂線Svを下ろして垂線長Stおよび交点Spを算出するとともに、中心軸線Krの方向に基づいて決定される第1の座標軸Xsおよび垂線Svの方向に基づいて決定される第2の座標軸Ysを有する手動操作座標系Cmを設定する。そして、操作手段からの方向指示入力に従って、作業ツールに、第1の座標軸方向Xsへの移動、または第2の座標軸方向Ysへの移動、または交点Spを中心とし垂線長Svを半径とする円弧経路方向への移動を行わせる。
(もっと読む)
レーザ溶接方法、この溶接方法によって形成された溶接物、およびレーザ溶接システム
【課題】レーザ溶接の工程時間を短縮する。
【解決手段】レーザ照射装置を停止させる際に、移動途中の減速域A2−A3で溶接点へ向けてレーザ照射を開始し、レーザ照射を継続させつつレーザ照射手段を停止させ、停止後の区間A3−A4で所定の加工パターンの溶接を行い、さらに増速区間A4−A5でもレーザ照射を継続する。
(もっと読む)
多関節ロボットの測定姿勢ティーチング方法とティーチング治具
【課題】 光学系センサを用いてワークを測定する多関節ロボットに、測定姿勢を正確に教示することができる技術を提供する。
【解決手段】 多関節ロボット10にロッド部38を有するティーチングツール24を装着し、ロッド部38の先端に設けられる先端具50がワーク26の測定位置に接触するように、多関節ロボット10を動作させ、そのときの多関節ロボット10の姿勢を多関節ロボット10に記憶させることで、光学系センサを装着してワーク26を測定する際の測定姿勢を多関節ロボット10に教示する。多関節ロボット10に装着されたティーチングツール24のロッド部38は、多関節ロボット10に装着される光学系センサの測定軸に沿って伸びるとともに、先端具50は、多関節ロボット10に装着される光学系センサの測定距離範囲内に位置している。
(もっと読む)
創薬用自動ティーチング装置及び方法
【課題】短時間で行え、計測精度が高精度であり、安全性が高い創薬用ピッキング機構の創薬用自動ティーチング装置及び方法を提供する。
【解決手段】創薬用ピッキング機構が、測定用治具400を把持するとともに、位置を認識させる収納セル112の4つの隔壁に囲まれた領域内に測定用治具400を挿入して4つの隔壁方向に移動させて、測定用治具400が隔壁110の上部に当接する位置を計測し、X軸方向の移動から得られた2つのX座標値とY軸方向の移動から得られた2つのY座標値を求め、前記2つのX座標値の平均と前記2つのY座標値の平均とを収納セル112の中心位置とする位置計測機能を有することによって、前記の課題を解決する。
(もっと読む)
教示装置
【課題】部品と治具間の取付け上の互いの寸法公差が厳密に規定されていても目視で教示作業を行うために生じる教示位置の公差外れや部品や治具の破損を防止すると共に、部品を所定の力で押し付けながら組立作業を行う場合の力パラメータを数値で手入力する必要がない教示装置を提供する。
【解決手段】回転体の回転量を被操作対象の移動量とする操作部と、回転体の回転量及び回転方向を検出するセンサ120と、センサの検出値に基づいた被操作対象の移動量を指示する操作量指示部151と、被操作対象の特定方向の移動を規定する移動軸を選択する操作軸選択スイッチ140と、当該被操作対象が移動した位置を保存することを指示する教示ボタン130と、被操作対象が受ける反力を操作者に力覚提示するためのアクチュエータ110とを備えた教示装置である。
(もっと読む)
力表示方法及び力表示装置
【課題】ロボットに適切な教示を行うことで教示後の実際のロボットの作業中にハンドリング対象となる部品を破損させることのない力表示方法及び力表示装置を提供する。
【解決手段】被操作対象を特定方向の操作量だけ操作し、この操作に伴って被操作対象の受ける反力を操作者にフィードバックさせる教示装置における力表示方法であって、被操作対象の移動方向を規定する各軸に発生する反力を各軸ごとに計測する第1のステップと、各軸に発生して計測した反力の、予め設定された最大許容力に対する割合値を各軸ごとに計算する第2のステップと、計算した割合値をこれに対応する大小関係を表す記号に変換する第3のステップと、変換した記号を表示する第4のステップと、を有している。
(もっと読む)
情報処理装置、情報処理方法
【課題】 ロボットの動作教示において、操作者にとって直感的に指示が行える技術を提供すること。
【解決手段】 操作入力部200は、ロボット500における可動部分の移動方向を制御するためにユーザが操作する操作盤から、制御対象の可動部分を移動させる方向を示す方向指示を取得する。操作者位置取得部300は、ユーザの視点の位置を取得する。操作座標変換部400は、視点の位置から方向指示による方向への移動ベクトルを、ロボット500を基準として定義される座標系における移動ベクトルに変換する。そして、操作座標変換部400は、変換後の移動ベクトルに従って、制御対象の可動部分を移動させる為の指示を、ロボット500に対して出力する。
(もっと読む)
21 - 40 / 56
[ Back to top ]