
Fターム[3D041AA71]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931)
Fターム[3D041AA71]の下位に属するFターム
急発進防止 (39)
緊急発進可能 (9)
誤操作時の安全対策 (62)
後進時の安全対策 (23)
速度制限 (171)
ペダル、レバーの作動規制 (28)
インターロック規制 (6)
制御の解除 (46)
故障診断、警報 (143)
Fターム[3D041AA71]に分類される特許
81 - 100 / 404
車両の制御装置
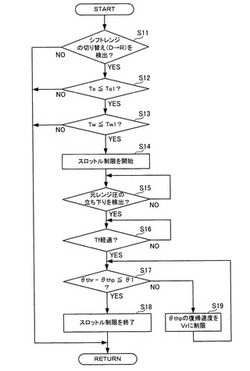
【課題】内蔵型のシフト・バイ・ワイヤ方式の車両においてもシフトレバーの操作時に駆動力の抑制を実行することができ、入力操作と異なる車両の挙動を防止することができるとともに、車両の挙動に対して違和感を覚えさせることを防止することができる車両の制御装置を提供する。
【解決手段】CPUは、シフトレンジの切り替えを検出し(ステップS11でYES)、油温Toが油温To1以下であって水温Twが水温Tw1以下である場合に(ステップS12およびS13でYES)、スロットル制限を開始する(ステップS14)。CPUは、元レンジ圧の立ち下がりを検出した時刻から待機時間Tfが経過した場合に(ステップS16でYES)、θthr−θthpがθ1以下であれば(ステップS17でYES)スロットル制限を終了し(ステップS18)、θthr−θthpがθ1より大きければ復帰速度をVrに制限する(ステップS19)。
(もっと読む)
駆動装置

【課題】有段変速機の変速段を変更する際にバッテリへの過大な電力の供給をより確実に抑制する。
【解決手段】変速機の変速段が変更中でないときには第1のキャリア周波数Fhiを用いてPWM信号を設定してモータを駆動するインバータをスイッチング制御し(S110,120,140)、変速機39の変速段が変更されている最中には第1のキャリア周波数Fhiよりも低い第2のキャリア周波数Floを用いてPWM信号を設定してインバータをスイッチング制御するため(S110,130,140)、変速段の変更中はモータの電流の脈動(リプル電流)を大きくして損失を増加させてモータの消費電力が不足するのを防止するから、モータからのパワーが減少した場合であってもバッテリに過大な電力が供給されるのを抑制することができる。
(もっと読む)
車載無段変速機の制御装置
【課題】無段変速機を搭載した車両にあって、内燃機関の最大吸気量が減少した状態においても車両走行性能の低下を抑制することのできる車載無段変速機の制御装置を提供する。
【解決手段】ECU31は、吸気量を調量するリフト量可変機構19の吸気バルブの最大リフト量が所定リフト量(異常時最大リフト量)以上とならない異常が生じたとき、その異常に起因する機関トルクの低下を抑制すべく、異常時最大リフト量が小さいときほど低い値に設定される上限回転速度にてCVT23の入力軸回転速度Ninが制限されるようにその変速比を制御するようにした。
(もっと読む)
車両のオートクルーズ装置
【課題】加速中に前方車両が直前に車線変更した場合や、低速走行の前方車両が直前に車線変更した場合でも、車速の急変を生じないオートクルーズ制御となす。
【解決手段】S11で通常のオートクルーズ用の基本加減速度ABを計算する。S12では、隣接車線走行中の左右前方車両が自車線へ車線変更する可能性(車線変更度PL,PR)を演算する。S13では、左右前方車両と自車との間における時間的車間距離(自車が前方車両に到達するまでの時間)TYL,TYRを演算する。S14では、左右前方車両の車線変更度PL,PR、および、左右前方車両との間の時間的車間距離TYL,TYRから、左前方車両を考慮した場合の加速度上限値ALと、右前方車両を考慮した場合の加速度上限値ARとを求め、両者のうちの小さい方を最終的な加速度上限値Aとする。S17では、ABを自車が発生するようアクセルペダルやブレーキ装置を駆動する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
車両の周辺地上高を検出して作動する安全装置及び周辺地上高検出装置
【課題】 車体の大きな揺れを惹起し得る車両の車輪の脱輪の可能性を事前に検知し、脱輪の予防或いは脱輪時の乗員の早期保護を可能にする装置を提供すること。
【解決手段】 本発明の装置は、走行中の車両の周囲の地面の画像を逐次取得する手段と、少なくとも二つの地面の画像に於いて写っている同一の像の移動量から車両の周辺地上高を算出する手段と、周辺地上高に基づいて車輪が脱輪する可能性の有無を判定する手段とを含み、周辺地上高と現在走行中の路面の高さとの差が所定の高さを越える領域と車両との距離が所定の距離より短くなったときに車輪が脱輪する可能性が有ると判定する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
走行環境認識装置および車両制御装置
【課題】 道路形状を精度よく予測できる走行環境認識装置および車両制御装置を提供する。
【解決手段】 車両制御装置は、自車前方走行路の状態を検出する走行路状態検出部9と、走行路状態検出部9の検出結果から少なくとも走行路上の物体の存在を認識する物体認識部10と、物体認識部10の認識結果に基づいて自車前方走行路の道路形状を予測する道路形状予測部8と、自車の走行軌跡を予測する走行軌跡予測部2と、道路形状予測部8により予測された道路の道路端と走行軌跡予測部2により予測された軌跡との交点を演算する交点演算部3と、交点演算部3により演算された交点を目標地点(衝突点)として車両の速度を制御する車両制御部5と、を備える。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、クラッチ出力軸36と、エンジンクラッチ35と、電動モータ22と、後車輪21と、差動装置23と、制御部と、を備える。クラッチ出力軸36は、エンジン2の駆動力を伝達する。エンジンクラッチ35は、エンジン2とクラッチ出力軸36との間に配置される。差動装置23は、クラッチ出力軸36からの出力と前記電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度及びエンジンクラッチ35の作動を制御する。そして、機体の前進時において、制御部は、クラッチ出力軸36からの出力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
車両のロックアップクラッチの制御装置
【課題】ロックアップクラッチの制御中にアクセルペダルからの足離しが行われたことによって、ロックアップクラッチを解放する際に生じるショックを防止する。
【解決手段】本発明はロックアップクラッチと、ロックアップクラッチの容量を制御するコントローラを有し、コントローラは、アクセルペダルからの足離しによって容量指令値PL(c)を、予め設定した第1所定値P1まで低下させると共に、当該第1所定値P1に低下させた状態を所定時間t0まで保持するように制御し、当該所定時間t0の経過後は、容量指令値PL(c)を、第1所定値P1よりも大きく且つ足離し時の容量P0よりも小さな第2所定値P2まで上昇させるように制御し、その後は、容量指令値PL(c)を徐々に低下させると共に、これに連動して、時間t1中のエンジントルクTeが第1所定値P1よりも大きくなるようにエンジンを制御する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ9が、ステレオカメラ2a,2b、加速度センサ3、ヨーレートセンサ4、車輪速センサ5a,5b,5c,5d、及び操舵角センサ6から入力された情報に基づいて、操舵操作入力の時系列データδSR*に関する評価重みwfを相対的に変更する。これにより、車両1の外界環境や車両状態に応じた適切な操舵操作量が算出されることにより、回避制御に対し運転者が感じる違和感を低減できる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
作業車
【課題】変速ペダルの操作で変速アクチュエータにより無段変速装置の変速比を変更する構成を有し、変速アクチュエータに動作異常が生じた場合であっても、走行安定性を確保することができる作業車を提供する。
【解決手段】無段変速装置21と、変速ペダル16の操作量に基づいて無段変速装置21の変速比を変更する変速アクチュエータ60と、ブレーキ機構23と、クラッチ機構22と、ブレーキペダル17の操作でブレーキ機構23の作動とクラッチ機構22の入切を同時に切り替える機械式連動機構と、ブレーキ機構23を作動状態にするブレーキ入り部材75と、クラッチ機構22を切状態にするクラッチ切り部材76と、変速ペダル16の非操作時にブレーキ入り部材75によりブレーキ機構23を作動状態にさせると同時に、クラッチ切り部材76によりクラッチ機構22を切状態にさせる制御装置80とを備える。
(もっと読む)
作業車輌
【課題】燃料ストップソレノイドを有するエンジンとHSTを変速させる変速用電動アクチュエータと左右の旋回用電動モータと作業クラッチ用電動アクチュエータと制御装置とを備えた作業車輌において、所定エラー発生時にはエンジンの強制停止により走行安全性を高めると共にエンジン負荷状態に拘わらず前記エンジンの強制停止を可能とする。
【解決手段】制御装置は、エンジンの強制停止を行うフェール制御の実行に際し、変速作動側センサ又は変速出力側センサからの信号に基づき車輌が前進走行中であり且つ作業クラッチ操作側センサ又は作業クラッチ作動側センサからの信号に基づき作業部が駆動中である場合にはエンジン高負荷状態であると判断し、作業クラッチ機構が動力遮断状態となるように作業クラッチ用電動アクチュエータを作動させてから所定時間経過後に燃料ストップバルブへの通電を行ってエンジンを強制的に出力停止状態とする。
(もっと読む)
運転支援装置
【課題】介入制御により確実に障害物を回避できる範囲において、可能な限り運転者による操作を尊重して運転者の違和感を低減することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU2は、障害物検出部22と、制御進路算出部23と、判断部24と、介入制御実行部25とを備えている。障害物検出部22は、自車両周辺の障害物領域を検出する。制御進路算出部23は、運転者による操作を所定の時間許可した後に介入制御が実行された場合に自車両が取り得る介入制御進路を算出する。判断部24は、障害物検出部22から送出された障害物領域及び制御進路算出部23から送出された介入制御進路から、障害物領域に対して重複しない介入制御進路が所定数以下であるか否かを判断する。介入制御実行部25は、介入制御進路が所定数である場合に、介入制御進路に沿った介入制御を実行させる。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】車両制御コントローラ14が、制動力制御を開始した後の運転者のアクセルペダルの誤操作を検出し、運転者のアクセルペダルの誤操作が検出された場合、運転者のアクセルペダル操作を抑制する。これにより、加速意図がない運転者のアクセルペダル走査を抑制できるので、回避制御に対して運転者が感じる違和感を低減することができる。
(もっと読む)
電動パワーステアリング装置
【課題】リヤトーコントロール装置が故障した場合に、操舵反力を付与し得る電動パワーステアリング装置の制御を適正にしてヨーモーメントの打ち消し易くする。
【解決手段】ステップ1で故障信号Sfの入力によってリヤトーコントロール装置11の故障が判定され(Yes)、ステップ6で左右の後輪5l,5rのトー角δrl,δrrが非対称と判定された場合(No)、故障時用のヨーレイト反力成分マップを参照してヨーレイト反力成分Tbγを正常時よりも大きく設定し(ステップ7)、故障時用の操舵角反力成分マップを参照して操舵角反力成分Tbθを正常時よりも小さく設定する(ステップ8)。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】車両制御コントローラ14が、回避経路の設定可能範囲の大きさに基づいて、回避制御に対する運転者の車両操作の寄与度を決定し、操舵角プロフィールと寄与度に応じてブレーキアクチュエータ12と操舵アクチュエータ13を制御することにより、回避経路に沿って車両1が走行し、且つ、運転者の車両操作が寄与度に応じた抑制度合いになるように操舵角,アクセル開度,及び制動液圧を制御する。これにより、回避経路の範囲の大きさ及び回避制御に対する運転者の回避操作の影響を考慮して回避制御が実行されるので、回避制御に対し運転者が感じる違和感を低減することができる。
(もっと読む)
連結車両、連結車両における連結圧力制御方法ならびにプログラム
【課題】連結車両において、連結部の高い信頼性を確保すること。
【解決手段】牽引車2は、動力源としてエンジン10を備え、ドーリ5、5aは、動力源として電動機11、11aを備えると共に当該電動機11、11aの電源としての電池12、12aを備え、エンジン10、電動機11、11aを連携動作させる連携制御部13、13a、13bを備え、この連携制御部13、13a、13bは、牽引車2、第1の被牽引車4、第1のドーリ5、第2の被牽引車4aの連結部に加わる圧力が所定値以下または所定値未満になるようにエンジン10、電動機11、11aを連携動作させる。
(もっと読む)
81 - 100 / 404
[ Back to top ]