
Fターム[3D041AA71]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931)
Fターム[3D041AA71]の下位に属するFターム
急発進防止 (39)
緊急発進可能 (9)
誤操作時の安全対策 (62)
後進時の安全対策 (23)
速度制限 (171)
ペダル、レバーの作動規制 (28)
インターロック規制 (6)
制御の解除 (46)
故障診断、警報 (143)
Fターム[3D041AA71]に分類される特許
61 - 80 / 404
路外逸脱防止装置
【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
車両の運動制御装置

【課題】違和感が少なく、安全性能向上を可能とする車両の運転制御装置を提供する。
【解決手段】四輪の駆動力と制動力を独立に制御可能な車両の運動制御装置において、車両の横運動に連係した前後加減速制御指令に基づいて、四輪のうちの左右輪に略同一の駆動力及び制動力を発生する第1のモード(G−Vectoring制御)と、車両の横滑り情報から算出した目標ヨーモーメントに基づいて、四輪のうちの左右輪に異なる駆動力及び制動力を発生する第2のモード(横滑り防止制御)と、を有し、目標ヨーモーメントが予め定めた閾値以下のときは第1のモードが選択され、目標ヨーモーメントが閾値よりも大きいときは第2のモードが選択される。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】ブレーキに対して過度な負荷が加わることなく、ブレーキ装置により発生する振動や騒音も抑制し、ステアリング制御とブレーキ制御とによりドライバに対して現状の走行状態を的確に伝達しつつ、適切に車両の路外逸脱を防止する。
【解決手段】白線からの逸脱量に応じ白線からの逸脱を防止する第1のブレーキ制御量ABL0を、障害物に対する逸脱量に応じ障害物に対する逸脱を防止する第2のブレーキ制御量ABS0を設定し、白線からの逸脱を防止する第1のステアリング制御量ASL0を、第1のブレーキ制御量ABL0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定し、障害物に対する逸脱を防止する第2のステアリング制御量ASS0を、第2のブレーキ制御量ABS0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定する。そして、これらを基に、ブレーキ制御量AB、ステアリング制御量ASを算出する。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
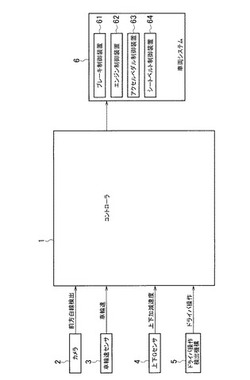
無人車両遠隔操作システム
【課題】操作者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部により取得した測距データに基づいて、走行可能エリアを抽出するエリア抽出手段10aと、無人車両の走行状態を取得する走行状態取得手段10bと、取得した無人車両の走行状態と、抽出した走行可能エリアとに基づいて、走行のための操作限界を示す操作限界情報を生成する操作限界情報生成手段10cとを無人車両に設ける一方、生成した操作限界情報を表示部に表示させる操作限界情報表示手段を遠隔操作装置に設けている。
(もっと読む)
状態推定装置
【課題】状態推定装置において、移動体に加速度が加わっている場合であっても、乗員の状態を推定可能とすること。
【解決手段】状態推定処理では、加速度センサから取得した加速度から加速度変化量を、解析処理にて導出した脈波伝播速度からPTT変化量を導出する(S150)。予め用意された状態対応関係群の中から、乗員によって入力された分類情報に一致する分類情報を有した状態対応関係に、導出された加速度変化量及びPTT変化量を照合する(S160)。このとき、照合された加速度変化量及びPTT変化量に最も類似する情報からなる第1対応関係に対応付けられた血管硬さが、乗員の血管硬さ、ひいては乗員の状態として推定される。
(もっと読む)
ハイブリッド車両
【課題】1モータ2クラッチ式のハイブリッド車両の発進制御において、HCM10が正常時であれば、内燃機関1は、HCM10からの目標トルクに基づいて自身の制御を行い、モータジェネレータ3が内燃機関1の出力を吸収することで第2クラッチ2をわずかにスリップさせ、耐久性を考慮した発進を実現している。本願では、CAN通信が失陥し、かつ、モータジェネレータ3が異常である場合の車両発進時の制御においても、第2クラッチの耐久性を確保しつつ、退避走行を可能にすることを目的とする。
【解決手段】CAN通信不良によりECM11がHCM10から孤立し、かつ、モータジェネレータ3が異常時において、ECM11は、第2クラッチ5がわずかにスリップしながら車両が発進できるように第2クラッチ5の締結トルク(車速)に応じて内燃機関1を制御する。これにより、耐久性を考慮した発進を実現できる。
(もっと読む)
4輪独立駆動車両の制御装置
【課題】インホイールモータのいずれか1つにフェイルが発生し、その出力トルクが減少する状況であっても、安定した走行を継続させることが可能な4輪独立駆動車両の制御装置を提供すること。
【解決手段】駆動力源として力行機能と回生機能とを有する電動機と、摩擦力により車輪を制動するブレーキ装置とを備え、前後左右の4輪のトルクをそれぞれ独立に制御可能な4輪独立駆動車両の制御装置において、前記4輪のいずれか1輪にフェイルが生じた際に、前記電動機が力行制御される場合は、前記車両全体の総駆動トルクを制限し、前記電動機が回生制御される場合は、前記車両全体の総制動トルクを前記フェイルが生じていない通常状態に維持するフェイルセーフ手段(ステップS3,S5)を設けた。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両制御システム
【課題】自車の進路上の障害物を回避する際に、ドライバの保舵状態の違いによって車両挙動制御装置の制御が影響を受けることを抑制して、障害物回避能力を向上させる。
【解決手段】操舵角に基づいて車両の挙動を制御するEPSコントローラ1、VSAコントローラ2、RTCコントローラ3、及び左右駆動力配分コントローラ4と、自車の進路上の障害物を検知するレーダー装置18と、障害物を回避するドライバの操作を判別して各コントローラを制御する障害物回避制御部5とを有し、この障害物回避制御部が、ドライバの保舵状態が変則的か否かを判別して、保舵状態が変則的である場合には、障害物回避制御中に各コントローラの制御値が増大補正されるように制御する構成とする。
(もっと読む)
衝突安全装置
【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
車両の走行制御装置および車両の走行制御方法
【課題】車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減するとともに、回避軌道への誘導を適切に行う。
【解決手段】リスク演算部は、選択された回避軌道を処理対象として、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。また、制御抑制部は、演算されるリスクに応じて、走行制御部による走行制御を抑制する。また、操舵反力調整部は、選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、ロック機構の誤解放状態に起因するモータジェネレータの過回転の発生を防止する。
【解決手段】ハイブリッド車両(10)の制御装置(100)は、走行モードとして無段変速モードが選択される場合には、ロック機構(400)が解放状態となるように、且つ、走行モードとして固定変速モードが選択される場合には、ロック機構が係合状態となるように、ロック機構を制御するロック制御手段(110)と、走行モードとして固定変速モードが選択されている場合において、モータジェネレータの回転速度が所定回転速度以上変化したときには、内燃機関(200)の機関回転速度を抑制する回転速度抑制制御を行う回転速度抑制手段(130)とを備える。
(もっと読む)
燃費走行制御時の補助制御装置
【課題】惰行制御時のエンジン回転数の低下に伴うエンジン騒音の変化を低減し、惰行制御時にドライバーが感じる違和感の低減を図った燃費走行制御時の補助制御装置を提供する。
【解決手段】走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数をアイドル回転数に落として惰行制御する燃費走行制御を行う走行体に搭載される燃費走行制御時の補助制御装置であって、前記惰行制御でエンジン回転数をアイドル回転数に落としたときに、その惰行制御前のエンジン騒音を発生させるエンジン騒音発生手段13を備えたものである。
(もっと読む)
車両用衝突回避装置
【課題】 自車および物体の予測される衝突の態様に応じて的確な回避制御を行う。
【解決手段】 物体検知手段M1が他車を検知し、走行状態検出手段M2が自車の走行状態を検出すると、相対関係算出手段M3が自車に対する物体の相対関係を算出する。衝突可能性判定手段M4が前記相対関係に基づいて自車が他車に衝突する可能性を判定し、衝突可能性が高いと判定された場合には更に他車との衝突が予測される自車の衝突部位と、自車の移動方向および他車の移動方向が成す交差角と、自車が他車に衝突すると予測される衝突予測時刻とを算出する。衝突回避制御手段M5は、衝突予測時刻以前に前記衝突部位および前記交差角に基づいて自車の姿勢を変化させて衝突を回避するので、自車の他車に対する衝突を効果的に回避することができる。
(もっと読む)
61 - 80 / 404
[ Back to top ]