
Fターム[3D041AA79]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931) | 制御の解除 (46)
Fターム[3D041AA79]に分類される特許
1 - 20 / 46
運転支援装置
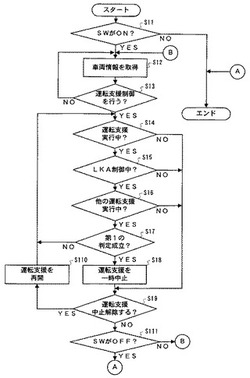
【課題】LKA制御が中止したことをドライバーに警告音や表示により知らせていた従来の方法と比較し、LKA制御が中止したことをドライバーにより気付きやすい方法で報知することのできる運転支援装置を提供する。
【解決手段】車両の走行状況を検出する走行状況検出手段と、車両のドライバーの運転を支援するために複数の制御を行う制御手段と、予め定められた時間、車両のドライバーが当該車両のハンドルから手を離したか否かを判断する判断手段と、判断手段が車両のドライバーは予め定められた時間ハンドルから手を離したと判断した場合、複数の制御のうち少なくとも2つ以上の制御を中止する中止手段とを備える。中止手段は、判断手段が車両のドライバーは予め定められた時間ハンドルから手を離したと判断した場合に車線維持制御および当該車線維持制御と異なる制御を中止することを特徴とする。
(もっと読む)
走行制御装置

【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
車両用パワートレーン制御装置
【課題】駆動系保護のために行われる出力トルク制限の解除可否を適切に判定する車両用パワートレーン制御装置を提供する。
【解決手段】走行用動力源の出力トルクを制御する車両用パワートレーン制御装置100を、出力トルクを要求トルク入力手段の操作量に関わらず所定の制限トルク以下に制限する出力トルク制限手段と、出力トルク制限の解除操作が入力される解除操作入力手段107と、タイヤのグリップ余力を判定するグリップ状態判定手段110とを備え、出力トルク制御手段は解除操作が入力されかつ要求トルク入力手段の操作量が所定値以上である場合に、所定のトルク制限解除期間にわたって出力トルク制限を解除するとともに、グリップ余力の不足を判定した場合は出力トルク制限の解除を禁止する構成とする。
(もっと読む)
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車両用自動変速機の制御装置
【課題】インターロック状態の締結要素を解放するときに車両を減速させて、締結要素の解放を行い易くする。
【解決手段】複数の摩擦係合要素を油圧により選択的に締結して変速段を切り換える自動変速機の制御装置であって、摩擦係合要素のうちの締結させた締結要素のインターロック状態を検知するインターロック検知手段(S1)と、車速を検知する車両状態検知手段(S3)と、インターロック検知手段がインターロック状態を検知したときに、車両状態検知手段により検知される車速を判断し、車速が規定車速以下の場合に、エンジントルクをダウンさせるトルクダウン制御手段(S5)と、を含んで構成される。
(もっと読む)
車両の制御装置
【課題】故障時の車両加速を確実に防止し、且つ、故障検出信頼性向上、開発コスト削減の要求も満たす。
【解決手段】車両暴走に至る可能性のある故障が検出されたときに、エンジン11から車軸へのトルク伝達をカットして、故障時の車両加速を防止しながら車両を惰性走行させる。トルク伝達がカットされている期間にフェイルセーフ処理に移行すべき故障が発生しているか否かを判定し、当該故障が発生していると判定されれば、フェイルセーフ処理に移行してエンジン11の出力トルクを抑制した後にトルク伝達手段をトルク伝達可能な状態に戻してエンジン11の出力トルクを抑制して退避走行を可能とする。
(もっと読む)
車両の制御装置
【課題】エンジンを搭載した車両において、低コスト化の要求を満たしながら、運転者の誤操作による事故を防止又は軽減できるようにして、安全性を向上させる。
【解決手段】車両停止後の発進時に変速機12の進行方向切換状態が車両停止直前と同一状態でアクセル開度が増大したときにエンジン11の出力トルクを制限するトルク制限制御を実行する。これにより、車両が前進(又は後進ギア)で駐車スペースに進入して停止した後、運転者が誤って変速機12を前進ギヤ(又は後進ギア)にした状態でアクセルペダルを踏み込んだ場合に、車両の急発進を防止する。更に、車両停止直前の減速中にアクセル開度が増大したときにもトルク制限制御を実行する。これにより、車両が駐車スペースに進入して停止する直前の減速中や道路が渋滞中で停止直前の減速中に運転者がブレーキペダルと間違えてアクセルペダルを踏み込んだ場合に、車両の急発進を防止する。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
車両の駆動力制御装置
【課題】 後輪車輪速センサの異常時に対して、トランスミッションの保護および車両のドライバビリティの確保を両立させる。
【解決手段】 少なくとも後輪車輪速センサにより検出された後輪車輪速を用いて低摩擦係数路面を判定し、低摩擦係数路面が判定されるとフュエルカットやシフトチェンジの制限を行ってトランスミッションの保護を図るものにおいて、(a)後輪車輪速センサが異常であること(ステップS114)、(b)シフトレンジがリバースレンジからドライブレンジに操作されてから所定時間が経過したこと(ステップS112)、(c)変速段が3速以上になったこと(ステップS113)の各条件のうち、(a)の条件が成立した場合、あるいは(b)の条件および(c)の条件の少なくとも一方が成立した場合に、異常の可能性がある後輪車輪速を用いた低摩擦係数路面の判定を禁止し、トランスミッションの出力軸回転数から算出した車輪速で後輪車輪速を代用する。
(もっと読む)
車両用追従走行制御装置
【課題】 車両用追従走行制御装置において、自車が先行車の発進に追従して自動的に発進する機能を備えていると運転者が誤認するのを防止する。
【解決手段】 停止した先行車Vbに追従して停止しようとした自車Vaの減速中に先行車Vbが発進した場合、自車Vaが先行車Vbに追従してそのまま加速すると、運転者は自車が自動発進機能を備えていると誤認する可能性がある。そこで先行車Vbの停止位置に仮想先行車Vb′を設定することで、実際の先行車Vbが発進した場合でも、停止中の仮想先行車Vb′に追従して自車Vaを一旦停止させる。その結果、運転者が発進スイッチを操作して発進意思を示すまで自車Vaは発進することがなくなり、自車が自動発進機能を備えていると運転者が誤認するのを防止することができる。
(もっと読む)
変速制御装置およびそれを備えた自動二輪車
【課題】手動モード運転と自動モード運転とを切換可能な自動二輪車において、リンプホーム性を向上させる。
【解決手段】変速制御装置50は、有段のドグクラッチ式のシフト機構43と、シフト機構43のギアポジションを変更するシフトアクチュエータ70と、クラッチ44と、クラッチアクチュエータ60と、運転者によって操作され、シフトアクチュエータ70およびクラッチアクチュエータ60によるシフト機構43のギアポジションの変更を指示するシフトスイッチ72と、運転者によって操作され、手動モード運転と自動モード運転とを切り換えるモード切換スイッチ71と、ECU90とを備えている。ECU90は、所定の故障時に、自動モード運転を規制しかつ手動モード運転を許可する運転許可部93を有している。
(もっと読む)
走行制御装置及び走行制御プログラム
【課題】車両の走行状況に応じて適切に走行制御を再開する。
【解決手段】目標車軸トルク生成部52は、車速維持演算部51により演算された目標加速度を実現するための目標車軸トルクとして、車両の走行に対する走行抵抗を加味したフィードフォワード成分が含まれた目標車軸トルクを算出する。制動調停部58は、目標車軸トルク生成部52から入力される目標車軸トルクと、ブレーキドライバモデル57により演算された運転者のブレーキ操作量に対応する要求制動車軸トルクのうち、減速量が大きい方のトルクを選択して制動要求トルク実現部59へ出力する。また、要求制動車軸トルクが目標車軸トルクを上回っている(減速量が大きい)状態では、ブレーキオーバライド信号をFBトルク演算部62へ出力する。制動要求トルク実現部59は、制動調停部58から入力した車軸トルクを実現するための制御信号をブレーキECU40へ出力する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、ACC制御の実行中に、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に、先行車が存在するときは、車間制御ECU20及びブレーキ制御ECU42は先行車の減速度に応じて自車両を減速させる。これにより、運転者が居眠り等の状態にないにも関わらず、運転者の意図に反して速度が低下することが少なくなり、安全性を確保しつつ運転者に与える違和感を軽減することが可能となる。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】シフトポジションがニュートラルポジションに設定された状態で運転者による操作がなされたときにハイブリッド自動車をより適正に制御する。
【解決手段】ハイブリッド自動車20では、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際にアクセル開度Accが閾値A2以上であることを含む条件が成立したときには、解除条件(ステップS3106,S3107)が成立するまで、アクセル開度Accに応じた要求トルクTrqと緩変化制約としての時定数τとに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定され(ステップS3108)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される。
(もっと読む)
車両用走行制御装置
【課題】運転者による頻繁なスイッチ操作を不要とし、燃費性能の向上、及び、運転者による駆動力の増加要求に対するレスポンスの向上の両立を図ることが可能な車両用走行制御装置を提供すること。
【解決手段】自車両の周辺環境に関する周辺環境情報に基づいて、運転者による駆動力の増加要求の可能性の有無を推定する駆動力増加要求推定手段56を備え、駆動力増加要求の可能性が有ると推定される場合に、駆動力の増加要求に備えてスタンバイ制御を実行し、駆動力増加要求の可能性が無いと推定される場合に、スタンバイ制御を抑制する。これにより、運転者によるスイッチ操作を不要として、燃費性能向上制御のON/OFFを自動的に切り換え、燃費性能の向上と、駆動力増加要求に対するレスポンスの向上との両立を図ることができる。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】車両の走行を適切に支援できる車間維持支援装置および車間維持支援方法を提供する。
【解決手段】定車間制御状態にある場合に所定の条件の少なくともいずれか1つが成立すると、制御装置3は、定車間制御状態から減速支援制御状態に遷移するよう各部を制御するように構成した(状態遷移G)。すなわち、検出された自車両の走行環境に基づいて、または、検出したドライバの操作に基づいて、定車間制御を解除するが、減速支援制御は解除しないように構成した。したがって、定車間制御によって車両が加速されることを防止して、車両の減速を行う減速支援制御を継続できる。これにより、ドライバの意図しない車両挙動を防止しつつ、減速を支援する走行シーンを拡大できるので、走行環境やドライバの操作に応じて適切に車両の走行を支援できる。
(もっと読む)
車両の走行制御装置
【課題】自車両の設定車速を走行環境に適した車速に変更することができる車両の走行制御装置を提供する。
【解決手段】車両の走行制御装置1は、ECU2と、対向車両の車速を検出するレーダセンサ3とを備えている。ECU2は、レーダセンサ3によって検出された対向車両の車速に基づいて、自車両の設定車速を決定し、その設定車速に応じてエンジン・AT制御ECU6及びブレーキ制御ECU7を制御することで車両の駆動・制動制御を行う。
(もっと読む)
運転走行支援装置
【課題】運転者に運転能力が低下していることを気付かせ、運転能力が低い状態での運転を減少させる運転走行支援装置を提供する。
【解決手段】運転走行支援装置10は、運転者の覚醒状態又は飲酒状態を検出する運転者状態検出部11と、前記運転者状態検出部11により検出された覚醒状態又は飲酒状態に基づいて、前記運転者の状態を判定する運転状態判定部12と、前記運転状態判定部12により判定された前記運転者の状態に基づいて、アクセル、ブレーキ、ステアリング、車間距離制御手段及び車線維持手段の少なくとも1つの制御特性を変更するように制御する車両制御部13と、を備えている。
(もっと読む)
追突される可能性に備えて駆動制御を行う車輌
【課題】車輌の信号待ちや渋滞での一時停車中に駆動力低減制御が行われることは天然資源の節約と大気保全にとって有意義であるが、後続車により追突されそうなときには発進の機敏性が求められることに鑑み、天然資源の節約と大気保全に最大限に寄与しつつ、そのようなときの車輌の発進の機敏性を損なわないよう一時停車に対し改善された駆動制御を行う。
【解決手段】車輌が信号待ちや渋滞で一時停車している間に駆動力低減制御を行っているとき、後続車に追突される可能性の予測に基づいて、駆動力低減制御の少なくとも一部を解除し、追突されそうになったとき機敏な発進で逃げられるようにする。
(もっと読む)
1 - 20 / 46
[ Back to top ]