
Fターム[3D041AA71]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 安全性、フェイルセイフ (931)
Fターム[3D041AA71]の下位に属するFターム
急発進防止 (39)
緊急発進可能 (9)
誤操作時の安全対策 (62)
後進時の安全対策 (23)
速度制限 (171)
ペダル、レバーの作動規制 (28)
インターロック規制 (6)
制御の解除 (46)
故障診断、警報 (143)
Fターム[3D041AA71]に分類される特許
21 - 40 / 404
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
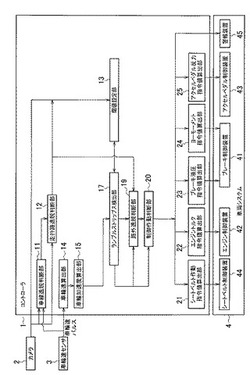
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両制御装置

【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
走行制御装置
【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
惰行制御装置
【課題】惰行制御終了時にタイヤがロックしてしまうなどの危険なモードを回避することが可能な惰行制御装置を提供する。
【解決手段】走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数をアイドル回転数に落とす惰行制御を行う惰行制御装置において、惰行制御中に変速の操作を禁止する変速禁止手段6を備えたものである。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
ハイブリッド車両
【課題】 蓄電装置の残容量が上限又は下限に近いことによって電動機による回転数合わせができないときでも、蓄電装置の損傷を発生させないように変速又はプレシフトをして、走行に影響を与えないハイブリッド車両を提供する。
【解決手段】 制御手段21a1は、蓄電池1の蓄電量が所定の上限値以上又は所定の下限値以下の場合に、モータMGを停止して、第1クラッチC1又は第1噛合機構SM1の摩擦力によって第1入力軸34の回転数を第1入力軸34の駆動ギアの回転数に近づける、或いは、第1入力軸34の回転抵抗力によって第1入力軸34の回転数を低下させることにより、第1入力軸34の回転数と第1入力軸34の駆動ギアの回転数との差を所定値以下にしてから、第1噛合機構SM1によって第1入力軸34の駆動ギアを第1入力軸34に連結するように制御する。
(もっと読む)
障害物回避装置
【課題】自車両周辺の障害物を高精度に認識しながら、当該認識された障害物および/または当該認識の信頼性に応じて、適切なタイミングで衝突回避システムを作動させる障害物回避装置を提供する。
【解決手段】本発明の障害物回避装置は、障害物を検知する複数の検知手段と、複数の検知手段によって検知された障害物に関する情報に基づいて、複数の検知手段によって検知されたそれぞれの検知結果に相関性があるか否かを判定する相関性判定手段と、相関性判定手段によって判定された判定結果に応じて、衝突回避システムを制御する障害物回避制御手段とを備え、障害物回避制御手段は、相関性判定手段によって相関性があると判定された場合、相関性がないと判定された場合に作動させるタイミングより早いタイミングで衝突回避システムを作動させることを特徴とする。
(もっと読む)
衝突回避支援装置
【課題】 運転者の衝突回避行動に応じた適切な衝突回避支援を実現できる衝突回避支援装置を提供する。
【解決手段】 衝突回避支援装置は、自車速Vを検出する車速センサ1と、障害物のX方向(自車進行方向に対し横切る方向)への動きである障害物移動状態(移動速度Vp)を検出するレーザレーダ4、カメラ5および画像処理装置6と、自車速Vと障害物移動状態(移動速度Vp)とに基づいて、制動回避制御と操舵回避制御の重み付けを設定する重み付け設定部11aと、を備える。
(もっと読む)
ドライバ状態検出装置
【課題】ドライバの意識喪失状態をより早い段階で検出することができるドライバ状態検出装置を提供する。
【解決手段】本発明に係るドライバ状態検出装置1では、ドライバの操舵特性であるモデルパラメータを予め算出し、車線と車両の偏差に対して、そのドライバが本来操作すると考えられる推定舵角を算出する。その推定舵角と実舵角とのずれに基づいて見かけ上の目標コースを算出し、意識喪失判定に用いる。見かけ上の目標コースが車線中心から単調に外れた場合には、それは意識喪失状態であると判断する。また、モデルパラメータが小さい場合に発生する誤判定を回避するために、自車両の進行方向の延長線上に見かけ上の目標コースがある場合にのみ意識喪失判定を行う。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車両の退避走行制御装置
【課題】車両走行中の緊急時に車両を安全な場所まで退避走行させる際の安全性・ドライバビリティを向上させる。
【解決手段】運転者が操作可能な位置に退避走行スイッチ11を設ける。車両走行中に何等かの緊急事態が発生して運転者が車両を停車させた方が安全だと感じたときに、運転者が退避走行スイッチ11をオン操作すると、退避走行用リレー20と電子スロットル用リレー21がオフされて、車両走行モードが退避走行モードに切り替えられる。これにより、電子スロットル装置18の電源をオフして、スロットル開度を退避走行用スロットル開度まで閉じることで、エンジン17の出力を低下させて、車両駆動力を抑制し、車両を退避走行させる。退避走行中も、エンジン17の運転を継続することで、パワーステアリング装置及びブレーキ装置を運転者がハンドル操作可能で且つ退避走行中のブレーキ力を確保する。
(もっと読む)
車両の駆動力制御装置
【課題】何らかの原因によってアクセルペダルが戻らない事態に陥っても駆動力を十分に低減できる車両の駆動力制御装置を提供する。
【解決手段】アクセルペダル及びブレーキペダルの両方の踏み込みに基づいてフェールセーフ制御が必要であるか否かを判定するフェールセーフ判定部(110)と、アクセル操作量に基づいてエンジンを制御するための制御用アクセル操作量を設定し、フェールセーフ制御が必要であるときに制限された制御用アクセル操作量に基づいてエンジン出力を制限するエンジン制御部(130〜160)と、トランスミッションの変速比を設定する基本変速モードとその基本変速モードに比較して大きい変速比が選択される駆動力重視変速モードとを備え、フェールセーフ制御が必要であるときに駆動力重視変速モードを禁止して基本変速モードに制限して制御用アクセル操作量に基づいて変速制御するトランスミッション制御部(200)と、を備える。
(もっと読む)
車両の駆動力制御装置及び駆動力制御方法
【課題】無用な変速制御を回避してドライバーに違和感を感じさせない車両の駆動力制御装置及び駆動力制御方法を提供する。
【解決手段】アクセルペダル及びブレーキペダルの両方の踏み込みに基づいて、フェールセーフ制御が必要であるか否かを判定するフェールセーフ判定部(110)と、アクセル操作量に基づいて、エンジンを制御するためのエンジン制御用アクセル操作量を設定し、フェールセーフ制御が必要であるときに、制限されたエンジン制御用アクセル操作量に基づいてエンジン出力を制限するエンジン制御部(130〜160)と、フェールセーフ制御が必要であるときに、エンジン制御部(130〜160)がエンジン出力を制限するのに遅れて、制限されたエンジン制御用アクセル操作量に基づいて変速制御するトランスミッション制御部(170,200)と、を備える。
(もっと読む)
自動車運転支援装置および自動車
【課題】大きな力で自動車操縦機器を一定位置または角度で保持する必要がある状況であっても、アクチュエータのエネルギー消費を抑制し、機器の寿命を確保すると共に、装置の小型化を図る。
【解決手段】自動車の運転を支援する自動車運転支援装置であって、駆動力を発生するアクチュエータと、前記アクチュエータが発生した駆動力を一方向にのみ伝達する不可逆機構と、前記不可逆機構から伝達される駆動力を伝達しまたは切断する切り替え機構と、前記駆動力切断機構が前記不可逆機構から伝達される駆動力を伝達するときに、自動車操縦機器へ前記駆動力を伝達する駆動力伝達機構と、を備える。
(もっと読む)
運転支援装置
【課題】本発明は、リスク回避の確実性の向上が可能な運転支援装置を提供することを目的とする。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために運転支援を実施する装置であって、運転者の視線を検出するドライバ状態検出部4と、運転者が対象物を注視しているか否かを判定する注視判定部13と、各運転支援形態における制御介入度を調整する制御介入度調整部20と、運転支援形態及び調整された制御介入度に基づき、運転支援のための制御を実施する運転支援制御部15とを備え、制御介入度調整部20は、注視判定手段により運転者が対象物を注視していると判定されなかった場合に、注視していると判定された場合と比較して制御介入度を大きくする。
(もっと読む)
運転支援装置、及びその方法
【課題】複数の注意対象が存在する場合には、常に運転支援制御の内容を変更する処理をすることのできる運転支援装置、及びその方法を提供する。
【解決手段】車両の周囲の状況を示す状況情報を取得する取得手段と、予め定められた設定値にしたがって車両の走行状態の制御をする制御手段と、制御手段によって走行状態の制御が開始される前に、取得手段によって、予め定められた2種類以上の状況を示す状況情報が取得されたとき、設定値を変更する変更手段とを備える。
(もっと読む)
21 - 40 / 404
[ Back to top ]