
Fターム[3D041AC04]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | 推進装置、エンジン (1,823) | アクセルペダル、レバー (183)
Fターム[3D041AC04]に分類される特許
1 - 20 / 183
車両用運転操作支援装置
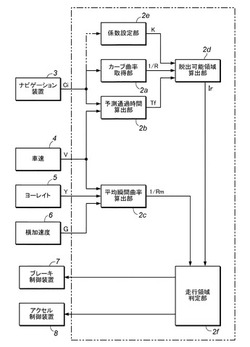
【課題】実車位置とナビゲーション装置上の自車位置とにずれが生じていた場合でもカーブを脱出する際の加速操作に対する違和感を運転者に与えることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からカーブ情報を取得し、カーブ情報からカーブを抜け出るための脱出可能領域を設定し、車速V・ヨーレイトY・横加速度Gから走行状態を取得し、カーブの長さと車速とから通過時間を求め、走行状態から平均瞬間曲率を求め、平均瞬間曲率を積分して自車が脱出可能領域にある場合には速度抑制制御を解除する。ナビゲーション装置のみでカーブ走行時の運転操作支援を行う場合のずれを防止することができ、運転操作支援としてカーブ走行自に減速制御する場合に、運転者がカーブ脱出のために加速操作しようとした場合に減速制御を続けてしまうという違和感を運転者に与えることを防止し得る。
(もっと読む)
自動制動装置

【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車両制御装置
【課題】見通しの悪いブラインドコーナーにおいて、適切な低燃費速度パターンを生成する車両制御装置を提供する。
【解決手段】本発明に係る車両制御ECU2(車両制御装置)は、車両1がこれから走行する走行経路に関する情報である目標走行経路情報を取得する目標走行経路情報取得部21と、目標走行経路情報に基づいて進行方向の見通し距離を算出する見通し距離算出部22と、見通し距離に基づいて上限速度を設定する上限速度設定部23と、上限速度に基づいて速度パターンを生成する速度パターン生成部24と、を備える。
(もっと読む)
車両用駆動力制御装置
【課題】 走行用駆動源の出力を微量とした状態で車両を移動させるための車両用駆動力制御装置を提供する。
【解決手段】 微量出力モードが選択されていると判定され、かつ、ブレーキペダルが操作されたと判定されたときに、車両を移動させるために必要とする出力(必要出力)を決定し、エンジンの出力が必要出力となるようにエンジンを自動制御する微量出力モードを実行するので、エンジンの出力を微量とした状態で車両を移動させることができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
車両の制御装置
【課題】クラッチの耐久性を向上可能な車両の制御装置を提供すること。
【解決手段】アクセルヒルホールド時に、クラッチを開放し、ブレーキ制御手段によって車両停止状態を維持する締結要素保護制御を、アクセルペダル開度に基いて設定された要求トルクが勾配負荷トルク相当値に基づいて設定された上限トルクと下限トルクの範囲内か否かで判断し、要求トルクが上限トルクと下限トルクの範囲外となったときは、締結要素保護制御を解除する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び制御対象車輪の全てについてのトラクション制御の両者が同時に行われる場合に、駆動要求が満たされない不満を運転者が感じる虞れを低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回補助制御の実行中にトラクション制御によって全ての制御対象車輪の前後力が低減される状況に於いては、旋回補助制御による旋回内輪の前後力の低減量を小さくし、或いは旋回補助制御による旋回内輪の前後力の低減を中止する。これにより旋回内輪の前後力の低減量が減少する量にて車両全体の駆動力が増大される。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
衝突回避装置
【課題】自車両と当該自車両周辺に検知された障害物との衝突が回避されて、自動制動システムによる自動ブレーキ制御を解除しようとする際に、運転者によるアクセル操作の意思を尊重しつつ、自車両と当該自車両周辺に検知された障害物との衝突が回避された直後に自車両が急発進しないようにする衝突回避装置を提供する。
【解決手段】本発明の衝突回避装置は、自車両周辺の障害物を検知し、当該障害物との衝突を回避する衝突回避システムを備えた衝突回避装置であって、自車両周辺の障害物を検知する障害物検知手段と、衝突回避システムによってブレーキを制御するブレーキ制御手段と、ブレーキ制御手段によって自車両のブレーキを制御した後、当該障害物との衝突を回避したか否かを判定する衝突回避判定手段と、当該障害物との衝突を回避したと判定された場合、予め設定された制限駆動力を超えてエンジン駆動力を上昇させないエンジン駆動力制御手段とを備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
惰行制御装置
【課題】車両振動の影響による惰行制御の終了を防止できる惰行制御装置を提供する。
【解決手段】惰行制御判定マップ2へのクラッチ回転数とアクセル開度のプロット点が惰行制御可能領域内にあって、アクセルペダル操作速度が所定範囲内にて、かつクラッチ回転数とアクセル開度のプロット点が惰行制御しきい線をアクセル開度減少方向に通過したとき、クラッチを断すると共にエンジン回転数を低下させて惰行制御を開始し、アクセルペダル操作速度が所定範囲外となったか又はプロット点が惰行制御可能領域外に出たとき惰行制御を終了する惰行制御実行部3と、アクセルペダル操作加速度が車両振動判定値範囲外のときには、惰行制御実行部3による惰行制御開始・終了の判定を無効とし、アクセルペダル操作加速度が車両振動判定値範囲内のときは、惰行制御実行部3による惰行制御開始・終了の判定を有効とする振動影響除去部4とを備える。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
惰行制御装置
【課題】乗り心地を向上させ、ドライバーの不快感を低減することが可能な惰行制御装置を提供する。
【解決手段】惰行制御中は惰行許可フラグをオフにし、惰行制御中でなく、かつ惰行制御終了条件が成立したときに惰行許可フラグをオンにする惰行許可フラグ制御部6を備え、惰行制御実行判定部5は、惰行許可フラグがオンであるときのみ惰行制御を開始するようにされる。
(もっと読む)
惰行制御装置
【課題】惰行制御中のアクセル開度の変化幅が大きい運転者に対してもアクセル開度の変化幅が小さい運転者と同等に惰行制御が実施できる惰行制御装置を提供する。
【解決手段】アクセル開度の変化幅を学習し、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が大きいときには惰行制御可能領域CAを拡大させ、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が小さいときには惰行制御可能領域CAを縮小させる惰行制御可能領域調節部4を備える。
(もっと読む)
運転操作支援装置、運転操作支援方法
【課題】停車状態を維持するための制動力を運転者のアクセル操作に応じて解除して車両を発進させる際に、車速コントロールの操作性を向上させる。
【解決手段】アクセル操作量Saが第一の閾値th1以下のときには、最終制動力指令値FBを保持制動力指令値FBPKBとし、アクセル操作量Saが第一の閾値th1を超えるときには、アクセル操作量Saが大きいほど、保持制動力指令値FBPKB未満の範囲で最終制動力指令値FBを小さくする(ステップS109)。一方、アクセル操作量Saが第二の閾値th2以下のときには、駆動力指令値FAはクリープトルクTcに設定し、アクセル操作量Saが第二の閾値th2を超えると、アクセル操作量Saが大きいほど、クリープトルクTcよりも大きな範囲で駆動力指令値FAを大きくする(S112)。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
1 - 20 / 183
[ Back to top ]