
Fターム[3D041AD10]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | アクセルペダル、レバーの踏込量、操作量 (1,357)
Fターム[3D041AD10]の下位に属するFターム
踏込み速さ、操作速さ (22)
Fターム[3D041AD10]に分類される特許
121 - 140 / 1,335
走行制御装置
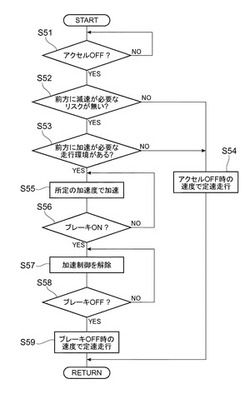
【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
車両の制御装置

【課題】時系列の目標滑り量に基づくロックアップクラッチ13のスリップ制御をする場合でも、ロックアップクラッチ13の温度の過剰な上昇を回避してその信頼性を確保する。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、目標加速度に基づきロックアップクラッチ13の作動状態でエンジン11の出力を制御するエンジン出力制御部21と、ロックアップクラッチ13の目標滑り量を時系列で設定する目標滑り量設定部24と、目標滑り量に基づいてロックアップクラッチ13のスリップ制御を実行する変速制御部(スリップ制御手段)22と、設定した目標滑り量に基づくスリップ制御が行われたときのロックアップクラッチ13の到達温度を事前に予測するクラッチ温度予測部25と、を備える。予測到達温度が所定温度よりも高くなるときには滑り量が小さくなるように目標滑り量を変更する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の制御装置
【課題】時系列で設定した目標加速度に対する追従制御を行う際に、ロックアップクラッチ13の作動時とロックアップクラッチ13の作動不可時との間の挙動差を抑制乃至無くす。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、実加速度が目標加速度に追従するようにエンジン出力を制御するエンジン出力制御部21と、変速制御部22と、ロックアップクラッチ13を作動不可状態を検出する作動不可検出部27とを備える。ロックアップクラッチ13の作動が不可能なときのアクセル踏み込み操作時には、目標加速度設定部23は、予め設定されている、ロックアップクラッチの作動状態での時系列の規範加速度を目標加速度にする。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
運転支援装置
【課題】目標走行パターンを用いた運転支援において運転者の受ける違和感を抑制する運転支援装置を提供することを課題とする。
【解決手段】走行予定経路の先読み情報に基づいて走行予定経路における目標走行パターンを設定し、当該目標走行パターンに追従するように運転支援を行う運転支援装置1であって、運転者の運転操作の履歴に基づいて運転支援を行うことを特徴とし、運転者の運転操作の履歴に基づいて運転支援制御のON/OFFを切り替えたり、あるいは、運転者の運転操作の履歴に基づいて目標走行パターンを設定する。
(もっと読む)
車両制御システム
【課題】自動的に動力源の運転を停止および再開させる場合の燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】車両の動力源が車両の駆動輪によって回転駆動されるときの駆動輪に作用する動力源による負荷の大きさを変更可能な負荷変更手段と、負荷変更手段を制御する制御装置とを備え、制御装置は、車両の走行時に動力源による動力の発生を停止させる動力源停止制御を実行可能であり、制御装置は、動力源停止制御が実行され、かつ動力源が駆動輪によって回転駆動されている間に、運転者による制動操作の終了が検出され、制動操作の終了の検出後に運転者による加速操作の開始が検出された(S1−Y)ときに、制動操作の終了から加速操作の開始までの経過時間が予め定められた所定時間以上である(S2−Y)と、動力源による動力の発生を再開させることなく、負荷変更手段によって負荷の大きさを減少させる(S3)。
(もっと読む)
車両制御装置
【課題】アクセルオンからアクセルオフに移行したときの消費エネルギーを小さくし、エネルギー効率を高くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立した場合に車輪にキャンバを付与するキャンバ付与処理手段と、ニュートラル走行設定条件が成立したかどうかを判断するニュートラル走行設定条件成立判断処理手段と、ニュートラル走行設定条件が成立した場合に、駆動源と駆動輪との間のトルクの伝達を遮断するニュートラル走行設定処理手段とを有する。駆動源における摩擦、イナーシャ等が抵抗になって消費エネルギーが大きくなることがない。
(もっと読む)
モータ走行車両制御装置、モータ走行車両制御方法
【課題】坂路においてモータが過熱することを事前に防ぐことが可能なモータ走行車両制御装置及びモータ走行車両制御方法を提供すること。
【解決手段】駆動力の少なくとも一部を電気モータ16とする車両のモータ走行車両制御装置100であって、車速を検出する車速検出手段61と、アクセル開度を検出するアクセル開度検出手段14と、路面の傾斜を検出する傾斜検出手段13と、車速に基づいて車両の停止状態を判定する停止判定手段と、停止判定手段により停止状態であると判定され、アクセル開度が第1の閾値より大、かつ、路面の傾斜が第2の閾値より大、という条件が成立する車両状況か否かを判定する判定手段63と、車両状況の場合、車両に制動力を加える制動制御手段66と、電気モータのモータ電流を低下させるモータ電流制御手段65と、を有することを特徴とする。
(もっと読む)
ブレーキと間違え,アクセルを一気に踏み込んでしまった時,速やかにエンジンと車両を停止させるシステム
【課題】突然の飛び出しや身体をひねっての後退運転をする場合などで、ブレーキペダルと間違えてアクセルペダルを一気に踏み込んでしまい事故に至る場合がある。このような場合瞬時にエンジンを停止させ、同時にブレーキを作動させて車両の暴走を防ぎ事故を防止するための機構である。
【解決手段】ブレーキのつもりでアクセルペダルを一気に踏み込んだ場合、アクセルペダルに押されてスイッチが入り、そのスイッチの連動でイグニション回路や燃料ポンプ、あるいはコンピュータなどを停止させ、直ちにエンジンを停止させる。更に、スイッチの連動によって電磁式ブレーキを作動させて車両を停止させるものである。
(もっと読む)
車両制御装置
【課題】よりドライバーの心理状態を反映したエコ運転及び快適を実現しることができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、ドライバーの笑顔状態を含む心理状態を推定する推定手段201aと、推定手段201aにより推定された心理状態が笑顔状態である場合に、車両の制御内容を省燃費及び快適に対応させて変更する変更手段202bとを含むことを特徴とする。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
車両制御装置
【課題】運転者の意思に沿った応答性で所望の加速度を発生させることのできる車両制御装置を提供すること。
【解決手段】アクセルペダル20の操作速度が所定の操作速度よりも速い場合には、駆動装置10を制御する際におけるアクセルペダル20の操作に対する応答特性を高くするので、アクセルペダル20の操作速度が所定の操作速度よりも速く、運転者が駆動力の急激な変化を要求していることを示している場合に、駆動力を急激に変化させることができ、運転者の要求を満たすことができる。この結果、運転者の意思に沿った応答性で所望の加速度を発生させることができる。
(もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】運転者のアクセル操作量に対する最適な要求値を決定することにより、運転者の感性に即した加速を十分に実現しつつ、ドライバビリティの悪化を抑制することができる車両制御システムおよび車両制御方法を提案すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン、T/M)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御する車両制御装置とを備える。アクセル開度Paと要求加速度Gxとの関係は、加速度発生装置により発生可能な加速度である最小発生加速度Gxminに基づいて所定の特性を維持しつつ変更される。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動力制御装置において、内燃機関において作動する気筒数が変化する際に生ずるショックの軽減を図る。
【解決手段】車両の駆動力制御装置は、複数の気筒(10)を有し、部分気筒運転と全気筒運転とを選択的に行う内燃機関(1)を内燃機関を備えた車両を制御する。気筒の各々について休止状態及び作動状態を切り替える気筒切り替え手段(100)と、回転速度比が可変である変速手段(2)と、車両の慣性力が気筒の数の変化に伴うトルク変化量を補償するように、前記回転速度比を制御する制御手段(100)とを備える。
(もっと読む)
補完的再生トルク・システムおよびその制御法
【課題】車両用補完的再生トルク・システム(RTS)のための制御装置、既存の車両コンポーネントとのインターフェース、とそれに付随した制御。
【解決手段】再生トルク・システムは車両の駆動列に対してエネルギー貯蔵およびエネルギー供給を選択的に行い、要求があったときに補完的トルクを供給する。再生トルク・システムは液圧的または電気的なものであることが可能であり、また、エンジンから見て変速機の上流側または下流側に配置することができる。再生トルク制御モジュールは、加速ペダル位置センサとエンジン制御モジュールの間に配置され、加速ペダル位置信号をインターセプトし、再生トルク・システムの動作モードに応じてそれを修正し、修正後のスロットル信号をエンジン制御モジュールに送る。再生トルク制御モジュールはエンジン制御モジュールからの各種信号をインターセプトし、修正した上で車両のその他の制御モジュールに一斉送出する。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
121 - 140 / 1,335
[ Back to top ]