
Fターム[3D041AE00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943)
Fターム[3D041AE00]の下位に属するFターム
Fターム[3D041AE00]に分類される特許
1 - 20 / 443
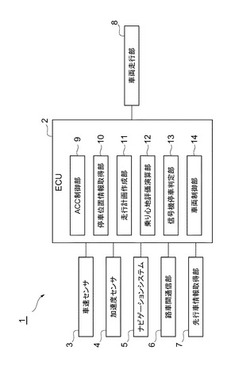
車両制御装置
【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
自動制御装置

【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構作動に伴う操舵トルク変化を精度よく抑制し、走破性と安定性とを両立できる車両の車両統合制御装置を提供する。
【解決手段】左前輪11の車輪速と右前輪12の車輪速との車輪速差(回転速度差)が所定の閾値を超えると、フロント左右輪差動制限機構の制御における拘束トルクTnを、左前輪11の車輪速と右前輪12の車輪速との車輪速差に比例した拘束トルクとして設定、制御する。さらに、前記設定、制御したフロント左右輪差動制限機構の制御における拘束トルクTnと前記車輪速差(回転速度差)の方向に応じて左前輪11と右前輪12との駆動力差を推定し、前記駆動力差によって生じる操舵トルク変化に相当するEPS操舵トルクを、電動パワーステアリング22による操舵補助力であるアシストトルクTepsとして付加し、左右輪差動制限機構作動に伴う操舵トルク変化を精度よく抑制する。
(もっと読む)
走行制御装置
【課題】車両の搭乗者に与える不快感を軽減できる走行経路を生成する走行制御装置を提供すること。
【解決手段】走行制御装置100では、仮の走行経路の生成を試みる場合に、生成予定の仮の走行経路について操舵量累積値STを算出する。そして、算出した操舵量累積値STが操舵量累積積閾値Aを超えていれば、車両1が蛇行するなどの走行経路が生成されるおそれがあり、搭乗者に不快感を与えるおそれがあるため、別の仮の走行経路の生成を試みる。一方、算出した操舵量累積値STが操舵量累積積閾値A以下であり、目標とする駐車位置に到着可能であれば、その仮の走行経路を用いて、走行経路全体を生成する。これにより、走行経路が生成される場合には、車両1の操舵角の変化が抑制される走行経路を生成できるので、搭乗者に与える不快感を軽減できる走行経路を生成できる。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構作動に伴う操舵トルク変化を精度よく抑制し、走破性と安定性とを両立できる車両統合制御装置を提供する。
【解決手段】制御手段122は、左右輪差動制限機構81を制御し、左右輪差動制限機構81による左右輪差動制限効果をトルク感応特性分として、エンジンの駆動トルクに応じた拘束トルクTeを演算する。そして、左前輪11と右前輪12の回転速度差が閾値を超えると、前記左右輪差動制限効果を回転数感応特性分として、前記回転速度差に応じた拘束トルクTnを演算する。続いて、前記回転速度差から推定された操舵トルク変化に応じてアシストトルクを演算する。さらに、拘束トルクを前記エンジンの駆動トルクに比例した比例拘束トルクTeと前記拘束トルクTnとの合計値に制御し、前記アシストトルクを前記回転速度差に比例した比例拘束トルクTeと回転速度差とに応じて制御する。
(もっと読む)
走行制御装置
【課題】予め用意しておく走行経路パターンの数を抑制しつつ、車両を基準位置から目標位置まで走行させる走行経路を生成する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100では、経路パターンPT1〜PT10を用いて仮の走行経路RT1を生成し、その仮の走行経路RT1ついて駐車可能条件が成立しない場合、その仮の走行経路RT1の終端から10通りの方向に走行経路を延長するように、10通りの新たな仮の走行経路RT1を一つずつ順番に生成していく。よって、経路パターンの種類が多くなくても、生成する仮の走行経路RT1の数を増やすことができ、駐車可能条件が成立する可能性を高めることができる。従って、予め用意しておく経路パターンPT1〜PT10の数を抑制しつつ、走行経路RT1〜RT3が生成される可能性を向上させることができる。
(もっと読む)
車線推定装置
【課題】走行安定性と車線追従制御性との双方を満足させることのできる目標走行線を設定する。
【解決手段】車線候補点設定部9aは撮像手段1で撮像した画像から走行車線の内側エッジを検出し車線候補点Pをプロットする。曲線近似処理部9bは車線候補点Pの点列に基づき、最小二乗法から推定車線Lpを求める車線推定式(y=ax2+bx+c)のパラメータ係数a,b,cを求め、今回の演算時を基準として設定時間幅tw前におけるパラメータ係数aの点列から曲線近似式を求め、この曲線近似式から設定時間進み後の予測パラメータ係数a’を設定する。車線位置設定部9cは予測パラメータ係数a’を、車線推定式に代入して設定時間進みtf後の推定車線Lpを求める。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
車両制御装置
【課題】よりドライバーの心理状態を反映したエコ運転及び快適を実現しることができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、ドライバーの笑顔状態を含む心理状態を推定する推定手段201aと、推定手段201aにより推定された心理状態が笑顔状態である場合に、車両の制御内容を省燃費及び快適に対応させて変更する変更手段202bとを含むことを特徴とする。
(もっと読む)
走行制御装置および走行制御方法
【課題】複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】パターン走行部RT1は、経路パターンPT1〜PT10に対応する走行経路ごとに区切られセクションが設定される。走行制御装置100は、車両1にパターン走行部RT1を自律走行させる場合、車両1に各セクションを第1セクションから順番に、セクション単位で走行させる。よって、車両1が現在走行しているセクションと、他のセクションとが接近していたり、交差している場合でも、車両1が他のセクションを走行し始めることがないので、車両1に現在走行中のセクションを継続して走行させることができる。従って、複雑に設定された走行経路に沿って車両を問題なく自律走行させることができる。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
1 - 20 / 443
[ Back to top ]