
Fターム[3D041AE07]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | 燃料供給、燃料噴射 (272)
Fターム[3D041AE07]の下位に属するFターム
フューエルカット (85)
Fターム[3D041AE07]に分類される特許
1 - 20 / 187
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
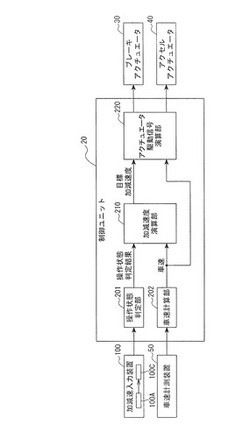
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
車両の制御装置

【課題】旋回性能向上制御を実行する場合に、エンジンの始動・停止に起因するドライバビリティの低下を回避して、車両の旋回性能を適切に向上させることができる車両の制御装置を提供すること。
【解決手段】少なくとも内燃機関を駆動力源として有し、旋回走行中に該駆動力源の出力によって発生させる駆動力もしくは制動力を補正することによりスタビリティファクタを目標値に追従するように変化させる旋回性能向上制御を実行する車両の制御装置において、前記旋回性能向上制御を実行する場合に、前記内燃機関の運転状態が停止から始動にもしくは燃焼運転から停止に切り替えられることがないように前記駆動力もしくは前記制動力を補正する駆動力補正手段(ステップS2〜S7)を設けた。
(もっと読む)
車両の統合制御装置
【課題】たとえ、アクセル操作に対してエンジンに発生させる駆動力特性として複数のモードを備えた車両であっても、各モードの違いを十分に発揮しながら、それぞれのモードにおいて最適な燃費を実現する。
【解決手段】統合_ECU22には、エンジン1の複数のモードに応じたそれぞれ異なるエンジンの燃料消費に係る特性(エンジンの燃料消費率マップ)を予め記憶して、予め設定した運転条件が成立する場合に、燃費優先制御を実行すべく、現在選択されているモード(M1、M2、M3の何れか)に対応するエンジンの燃料消費率マップに基づいて、現在のエンジンの運転状態よりも燃費が向上するエンジンの運転状態を選択し、該選択したエンジンの運転状態に基づいて、エンジン1と無段変速機3の少なくとも一方を制御する。
(もっと読む)
車両用走行制御装置
【課題】燃費性能を向上させること。
【解決手段】動力源としてのエンジン10と当該エンジン10の動力を駆動輪WL,WRに伝える動力伝達装置とを備えた車両の走行状態を制御する車両用走行制御装置において、自車の所定距離先までの間の走行路の勾配を把握し、その所定距離先でも自車が加速を続ける可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が可能な状態のまま当該エンジン10への燃料の供給量を減少させ又は当該燃料の供給を停止させた惰性走行を行い、自車が前記所定距離先を超えるまでに減速し始める可能性のあるときに、エンジン10と駆動輪WL,WRとの間の動力伝達が断たれるように動力伝達装置の動力断接部(ロックアップクラッチ35と入力クラッチC1の内の少なくとも1つ)を制御して前記惰性走行を行うこと。
(もっと読む)
車両の制御装置
【課題】ロックアップクラッチを有する流体式動力伝達装置を搭載した車両に対し、燃料消費率の更なる改善を図ることが可能な車両の制御装置を提供する。
【解決手段】ロックアップクラッチ付きのトルクコンバータを搭載した車両に対し、ロックアップクラッチの減速時スリップ制御時、ロックアップクラッチの油圧学習が未完了の場合にはロックアップ解放車速を高く(V2に)設定し、ロックアップクラッチの油圧学習が完了した場合にはロックアップ解放車速を低く(V2’に)設定する。また、車両の定常走行時、ロックアップクラッチの油圧学習が未完了の場合にはエンジン回転数を高く設定し、ロックアップクラッチの油圧学習が完了した場合にはエンジン回転数を低く設定する。
(もっと読む)
アイドリングストップ制御装置
【課題】従来よりもアイドリングストップの時間帯を長くして一層燃費を向上するとともに、エンジンの自動始動による車両発進時の安全性を向上したアイドリングストップ制御装置を提供する。
【解決手段】エンジンにクラッチを介して変速機を連結し、エンジンを自動停止および自動始動するアイドリングストップ制御装置であって、始動条件は、クラッチが断状態とされ、かつブレーキ操作部材の操作量が減少しあるいは無くなることを必要条件として含み、自動停止中にブレーキ操作部材の操作量に関わらず所定の制動力を発生して保持する手段(S29)と、自動停止中に始動条件が成立したか否かを判定する手段(S21〜S28)と、始動条件が成立するとエンジンを自動始動する手段(S30)と、ブレーキ操作部材の操作量が減少しあるいは無くなったときから所定の保持時間が経過すると所定の制動力を解除する手段(S34、S36)と、を有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時、トルク変動がそのまま車輪に伝わることを防止しながら、発進クラッチの固着判定時間の短縮化を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第2クラッチ5(CL2)と、固着判定手段(図9)と、を備える。モータジェネレータ2は、エンジン1に連結される。第2クラッチ5(CL2)は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。固着判定手段(図9)は、モータジェネレータ2をスタータモータとするエンジン始動制御が開始されると、モータジェネレータ2に対する許容入力トルク指令とエンジン1に対する燃料噴射停止指令を出力し続け、第2クラッチ5(CL2)のスリップ量Sが固着判定閾値S1を超えないままで第2ターマー値TIM2以上経過すると、第2クラッチ5(CL2)が固着であると判定する。
(もっと読む)
作業車両の駆動系制御装置
【課題】作業車両141において、低速走行しながらの各種作業中に排気ガス浄化装置50を強制再生させることなく、前記排気ガス浄化装置50の詰りを解消できるようにする。
【解決手段】走行機体142に搭載されたエンジン70と、該エンジン70に燃料を噴射するコモンレール式の燃料噴射装置117と、前記エンジン70からの動力を変速する無段変速機159と、前記エンジン70の排気系に配置された排気ガス浄化装置50とを備える作業車両141において、前記エンジン70の回転速度N及びトルクTに関するエンジン運転点Qが、前記排気ガス浄化装置50を自己再生できない低速低トルク側にある場合は、前記排気ガス浄化装置50の自己再生が可能な高速低トルク側に前記エンジン運転点Qを移行させると共に、前記走行機体142の車速Vを変更しないように前記無段変速機159の変速比を変更調節する。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
車両駆動システムの制御装置
【課題】内燃機関の出力を一定にしながら回転数を変更することが可能な車両駆動システムにおいて、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率が最大となる回転数まで内燃機関の回転数を速やかに変化させる。
【解決手段】回転数の許容最大変化量を出力に関連付けて記憶装置に記憶しておく。要求出力に応じた許容最大変化量を記憶装置から読み出し、予め設定された動作線上の回転数を初期値として許容最大変化量で回転数を変化させていく。そして、回転数が変更される度に、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率を計算し、システム効率が最大となる回転数を特定する。そして、システム効率が最大となる回転数を最適回転数として確定する。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、変速時における適正な同期制御が可能となると共に製品コストの増加を抑制可能とする。
【解決手段】エンジン11にクラッチ12を介して多段変速機13の入力軸37を駆動連結可能とすると共に、モータジェネレータ14に多段変速機13の入力軸37を駆動連結し、多段変速機13の出力軸38に最終減速装置15を介して駆動輪16を駆動連結し、ハイブリッドECU100は、多段変速機13の入力軸37の回転数が、この多段変速機13における最高変速段(第5速の変速段)に応じた規定入力軸回転数以上となるようにモータジェネレータ14を制御する。
(もっと読む)
車両制御装置
【課題】トルクコンバータ20付きの自動変速機2のシフトダウンが手動操作により要求されたときに、エンジン回転数を一時的に上昇させるブリッピングを行いながら、現在変速段から要求変速段への切り換えを行う高応答のブリッピングシフトダウン制御を実行する車両制御装置において、前記高応答のブリッピングシフトダウン制御を実行する際に、触媒15の温度が高い場合、低い場合と遜色のない変速応答性を確保しながら、触媒15の過剰昇温を抑制または防止する。
【解決手段】ブリッピングシフトダウン制御を実行する際、エンジン1の排気系に設けられる触媒15の温度が高いほど、スロットルバルブ6の開度指示を小さく設定するとともに、自動変速機2に備える多数の係合要素C1〜C4,B1,B2のうち要求変速段を成立するための係合側係合要素に対する油圧指示を大きく設定する。
(もっと読む)
車両の制御装置
【課題】故障時の車両加速を確実に防止し、且つ、故障検出信頼性向上、開発コスト削減の要求も満たす。
【解決手段】車両暴走に至る可能性のある故障が検出されたときに、エンジン11から車軸へのトルク伝達をカットして、故障時の車両加速を防止しながら車両を惰性走行させる。トルク伝達がカットされている期間にフェイルセーフ処理に移行すべき故障が発生しているか否かを判定し、当該故障が発生していると判定されれば、フェイルセーフ処理に移行してエンジン11の出力トルクを抑制した後にトルク伝達手段をトルク伝達可能な状態に戻してエンジン11の出力トルクを抑制して退避走行を可能とする。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】運転者のアクセル操作量に対する最適な要求値を決定することにより、運転者の感性に即した加速を十分に実現しつつ、ドライバビリティの悪化を抑制することができる車両制御システムおよび車両制御方法を提案すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン、T/M)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御する車両制御装置とを備える。アクセル開度Paと要求加速度Gxとの関係は、加速度発生装置により発生可能な加速度である最小発生加速度Gxminに基づいて所定の特性を維持しつつ変更される。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
1 - 20 / 187
[ Back to top ]