
Fターム[3D041AF09]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | 補正 (645)
Fターム[3D041AF09]に分類される特許
61 - 80 / 645
車両用接触回避支援装置
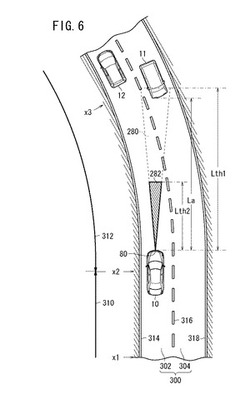
【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
車両のアンダーステア抑制装置及びアンダーステア抑制方法

【課題】アンダーステア傾向をより抑制可能な技術を提供することを目的とする。
【解決手段】車両がアンダーステア傾向と判定すると、基準US修正モーメント量Mθの大きさに応じて次の順番に段階的に制御が実行される。すなわち、まず車両ロールモーメントの前後配分を後輪1RL、1RR側寄りに変更する。次に、車両ロールモーメントの前後配分を後輪1RL、1RR側寄りに変更した状態を維持したまま、後輪1RL、1RRの旋回内輪に制動力を発生若しくは当該旋回内輪に発生している制動力を増大する。更に、上記制動状態を維持したまま、上記後輪1RL、1RR側寄りに変更した車両ロールモーメントの前後配分を前輪側寄りに再変更する。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動力を運転者の意図および車両の走行状況に一層適合させることの可能な、車両の駆動力制御装置を提供する。
【解決手段】車両における要求駆動力を求めるとともに、なまし係数を用いて要求駆動力をなまし処理することによりなまし駆動力を求め、そのなまし駆動力を目標駆動力として車両の駆動力を制御する、車両の駆動力制御装置において、車両の前後加速度または横加速度の少なくとも一方の値に基づいて、車両の加速度変化の滑らかさに対する車両の運転者の加速意図の度合いを求める加速意図算出手段(ステップS4)と、加速意図の度合いに基づいてなまし係数の大きさを変更するなまし係数算出手段(ステップS5)、要求駆動力をなまし係数を用いてなまし処理することにより、なまし駆動力を求めるなまし処理手段(ステップS7,S8)とを備えている。
(もっと読む)
4輪独立駆動車両の制御装置
【課題】インホイールモータのいずれか1つにフェイルが発生し、その出力トルクが減少する状況であっても、安定した走行を継続させることが可能な4輪独立駆動車両の制御装置を提供すること。
【解決手段】駆動力源として力行機能と回生機能とを有する電動機と、摩擦力により車輪を制動するブレーキ装置とを備え、前後左右の4輪のトルクをそれぞれ独立に制御可能な4輪独立駆動車両の制御装置において、前記4輪のいずれか1輪にフェイルが生じた際に、前記電動機が力行制御される場合は、前記車両全体の総駆動トルクを制限し、前記電動機が回生制御される場合は、前記車両全体の総制動トルクを前記フェイルが生じていない通常状態に維持するフェイルセーフ手段(ステップS3,S5)を設けた。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に違和感のない制御感を与えつつ、支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】設定時間後の自車両の将来位置を予測する。予測した自車両の将来位置が、予め設定した車線幅方向横位置である制御開始位置よりも自車走行車線の中央からみ外側にあるほど、自車走行車線の中央に向かうヨーモーメントを大きく自車両に付与して自車両を制御する。その際、自車両に付与する前記ヨーモーメントが小さいほど、自車両に大きな減速加速度を付与する。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から仮想的に移動させ、各経路パターンの先端に設定された仮想移動点に置く仮想移動処理手段と、前記各仮想移動点を、新たな基準点とする基準点更新処理手段と、各仮想移動点において、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段と、移動可能条件が成立しない場合、経路パターンを変更する経路パターン変更処理手段とを有する。前記移動可能条件が成立しない場合に前記経路パターンが変更されるので、経路を確実に生成することができる。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
車両の制御装置
【課題】有段変速機の変速過渡期に駆動力保障を確保し、トルク抜けを防止することができる車両の制御装置を提供する。
【解決手段】駆動系に、エンジン1,第2モータジェネレータ5及び駆動輪32,32と、高速段にて締結する摩擦クラッチ7と、低速段にて締結するドグクラッチ8と、を変速要素として有する有段変速機6と、を備え、変速要求時、ドグクラッチ8の断接指令を出力すると同時に、摩擦係合要素7をスリップ締結する変速制御手段を備えた車両の制御装置において、ドグクラッチ8の断接状態を検出するドグクラッチフォーク位置スイッチFを有し、変速制御手段は、ドグクラッチ8を断接するために摩擦係合要素7をスリップ締結するときの摩擦係合要素の油圧目標値Thtと、ドグクラッチ8が実際に断接したときの摩擦係合要素7への油圧指令値Tho*との差に基づいて、次回変速制御時における摩擦係合要素7への油圧指令開始値Thsを補正する。
(もっと読む)
車体傾動制御装置及びその方法
【課題】車体を傾動させる装置が正常でない場合に、車体の姿勢を車両の走行に適合した姿勢にする。
【解決手段】車体傾動制御装置は、車両前後方向に少なくとも2つ配置されそれぞれ、ロール方向に車体を傾動させる車体傾動装置21F,21Rと、車輪を転舵させる運転者の運転操作に応じて、各車体傾動装置21F,21Rを駆動制御する車体傾動装置駆動部25F,25Rと、各車体傾動装置21F,21Rが正常か否かを判定する車体傾動装置異常判定部31と、ロール方向の車体の姿勢を固定する車体傾動停止装置26と、を備え、車体傾動装置駆動部25F,25Rが、車体傾動装置異常判定部31が車体傾動装置21F,21Rの1つが正常でないと判定すると、車体傾動装置異常判定部31が正常と判定した車体傾動装置21F,21Rを駆動制御して、車体の姿勢をロール方向で中立姿勢にし、車体傾動停止装置26が、その中立姿勢に固定する。
(もっと読む)
車両挙動制御装置
【課題】 センサ類に故障が生じた場合においても、過大な目標制御量の出力を抑制できるようにした車両挙動制御装置を提供する。
【解決手段】 制御量ベース値Dbaseの絶対値|Dbase|が配分トルクリミット値Tdlimを継続して超え、ステップS29の判定がYesとなった場合、ATTS−ECU16は、ステップS30で配分トルクリミット値Tdlimを目標制御量Dtgtとして処理を終了する。なお、この際、制御量ベース値Dbaseの値が負であった場合には、トルクリミット値Tdlimに−1を乗じることによって、目標制御量Dtgtの符号を制御量ベース値Dbaseに一致させる。
(もっと読む)
衝突安全装置
【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
制駆動力制御装置
【課題】モードの切り替えにより生じる制動力または駆動力の変化を、一層確実に抑制することのできる制駆動力制御装置を提供する。
【解決手段】アクセルペダルの操作量またはブレーキペダルの操作量のいずれか一方を用いて、車両で発生する駆動力および制動力を求める第1モードと、アクセルペダルの操作量から駆動力を求め、かつ、ブレーキペダルの操作量から制動力を求める第2モードとを相互に切り替えることのできる制駆動力制御装置において、第2モードから第1モードに切り替える条件が成立した際に、アクセルペダルの操作量が所定値を超えると、第2モードから第1モードに切り替えて、アクセルペダルの操作量から駆動力および制動力を求めるモード切替手段(ステップS2ないしS6)を備えている。
(もっと読む)
自動変速機の制御装置
【課題】機関出力低下制御が実行不能であるときに、内燃機関から過大な駆動力が自動変速機に入力されて自動変速機の摩擦係合要素が損傷することを抑制できる自動変速機の制御装置を提供すること。
【解決手段】変速制御用ECU27は、ガレージシフトがなされたことを検知すると、実機関トルクが要求トルクよりも大きい、機関水温が低い、機関制御用ECU26との間の相互通信が途絶している、触媒温度が高いという各種条件が全て成立しなければ、第1クラッチや第2,第3ブレーキの係合を許可する。そして、変速制御用ECU27は、上述した各種条件のいずれか一つでも満たせば、フューエルカット制御が実行不能であるとして、第1クラッチや第2,第3ブレーキの係合を禁止する。
(もっと読む)
車両の走行制御装置および車両の走行制御方法
【課題】車両が障害物に接触することを回避するための走行制御を行う際に、運転者に与える違和感を低減するとともに、回避軌道への誘導を適切に行う。
【解決手段】リスク演算部は、選択された回避軌道を処理対象として、回避軌道と略直交方向に延在する所定範囲における障害物との接触可能性をリスクとして演算する。また、制御抑制部は、演算されるリスクに応じて、走行制御部による走行制御を抑制する。また、操舵反力調整部は、選択された回避軌道に対する自車両の走行状況に応じて、運転者の操舵操作に対する操舵反力を調整する。
(もっと読む)
車両制御装置
【課題】横風を受けている場合に、その横風により生じるヨーモーメントを所望の大きさに制御することにより、車両の実挙動を目標挙動に近づける。
【解決手段】車両が横風を受けている場合に、ヨーモーメントを横力で割った値である比率xの目標比率x*を、実際の車両の挙動が目標挙動となる大きさに決定する。横風は、車両の形状で決まる着力点に作用するため、横風の強さに基づけば横風によって車両に作用する横風ヨーモーメントを取得することができる。そして、アクチュエータが、横風の強さと目標比率x*とを掛けた値である目標ヨーモーメントから横風ヨーモーメントを引いた値である制御ヨーモーメントが付与されるように制御される。その結果、車両の実挙動を目標挙動に近づけることができる。
(もっと読む)
61 - 80 / 645
[ Back to top ]