
Fターム[3D041AF09]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | 補正 (645)
Fターム[3D041AF09]に分類される特許
161 - 180 / 645
車線逸脱防止制御装置
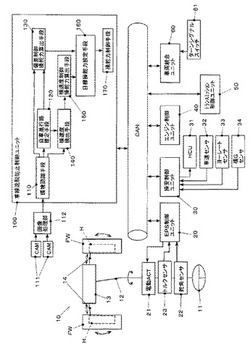
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構10に操舵力を付与する車線逸脱防止制御ユニット100を、走行車線に対する自車両の横速度を検出する横速度検出手段140と、走行車線内に設定した目標横位置Xcと自車両の横位置Xeとの偏差ΔXを積分することにより、走行車線からの逸脱を防止する方向へ第1の操舵力を設定する第1の操舵力設定手段(偏差制御操舵力算出手段)130と、横速度に基づいて走行車線からの逸脱を防止する方向へ第2の操舵力を設定する第2の操舵力設定手段(横速度制御操舵力算出手段)150と、第1の操舵力と第2の操舵力に基づいて目標操舵力を設定する目標操舵力設定手段160と、操舵機構に操舵力を付与する操舵力制御手段170とを備える構成とする。
(もっと読む)
側方障害物回避装置及び側方障害物回避方法

【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】車速を所望の車速に収束させることが困難であるとともに過度に加減速が繰り返されてスムーズに走行することができない。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間を前記目標車速で走行するために前記自車両を前記目標車速とすべき目標地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、前記目標地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御するとともに、前記目標地点に到達する前に前記自車両の車速が前記目標車速と一致した場合に、当該一致した一致地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御する。
(もっと読む)
車両の制駆動制御装置及び自動運転制御方法
【課題】自動運転の解除時の走行状況に応じて運転者の違和感を緩和する。
【解決手段】自車両の加減速制御を行い少なくともカーブ進入前にカーブを走行可能な目標車速に制御する自動運転制御を備える。その自動運転制御が解除されても、次のカーブまで自車両の減速状態が維持しない状態と推定される場合には、減速制御を維持する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線を検出できない場合があっても、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両側方の障害物を検出すると、運転者の操舵入力に基づき所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が、上記障害物に近い側の車線区分線を基準とした判定閾値に到達若しくは当該判定閾値よりも障害物側と判定すると、側方障害物に対する支援制御の開始と判定する。但し、障害物に近い側の車線区分線を検出できない場合には、上記制御開始を判定する際に基準とする車線区分線を車線幅方向外側へ変位させる。
(もっと読む)
車両用駆動装置の制御装置
【課題】駆動力源であるエンジン及び電動機と変速部とを備えた車両用駆動装置の制御装置において、第2駆動力源から第1駆動力源への駆動力源の切替え時(もしくは電動機による回生中からエンジン駆動への切替え時)のショックを抑制して、ドライバビリティの向上を図る。
【解決手段】例えば車速の増大により第2電動機MG2からエンジン10への駆動力源の切替えが発生した場合、まずは、無段変速部30の変速比をエンジン10に対応する変速比(ハイギヤ)に変更し、その変速比変更後に、エンジン10の始動を実施することで、切替え時のショックを低減する。さらに、切替え過渡時に、第2電動機MG2のトルクを無段変速部30の変速比に応じて一時的に増加することで、駆動トルクを確保してドライバビリティの向上を図るようにしてもよい。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】ドリフト走行時等において好適な旋回走行を実現するヨー制御を行う車両用動力伝達装置の制御装置を提供する。
【解決手段】予め定められた関係から前輪の横滑り角βf及び車体の速度Vに基づいて目標ヨー角速度γrefを算出する目標ヨー角速度算出手段66と、その目標ヨー角速度算出手段66により算出された目標ヨー角速度γrefに応じたヨーモーメントが得られるように前記トルク配分制御装置50の作動を制御するヨーモーメント制御手段70とを、備えたものであることから、車体の横滑り角が比較的大きいドリフト走行時においても、前輪横滑り角が旋回方向内側を向いている場合には旋回アシスト方向のヨーモーメントを発生させる等、ドリフト走行を妨げないヨー制御が実現できる。
(もっと読む)
車両の駆動力制御装置
【課題】ドライバーの加速期待をエンジン回転数の増加により検知し、これに応じた目標駆動力の増加補正により、ドライバーの加速期待に応え得る効果的な「伸び感」を演出可能な車両の駆動力制御装置を提供する。
【解決手段】ドライバーの要求に応じた車両の目標駆動力を求める目標駆動力演算手段1に対し、アクセル操作量および車速に基づいて車速制御分目標駆動力を生成する車速制御分目標駆動力生成部1aと、エンジン回転数の増加に合わせて増加する値であるエンジン回転補正率を算出するエンジン回転補正率演算部1bと、上記車速制御分目標駆動力およびエンジン回転補正率との乗算により回転補正付き目標駆動力を求める目標駆動力合成部1cとを設ける。エンジン回転数の増加時、これに合わせて車速制御分目標駆動力が増加補正されるため、エンジン回転数の増加によりドライバーの加速期待を検知して、この加速期待に応え得る効果的な「伸び感」を演出可能である。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
降坂路走行速度制御装置
【課題】 空走距離の短縮化を図りつつ、自動制動誤介入時の違和感を小さく抑えることができる降坂路走行速度制御装置を提供する。
【解決手段】 降坂路の路面勾配変化量である斜度変化量Δθを検出する入力処理部21を備え、HDCコントローラ1は、斜度θが固定パラメータθ2よりも小さい場合であって、斜度変化量Δθが変動パラメータθ1'以上のとき、車両を自動制動する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速させるための制御を実施する状態と実施しない状態とを利用者の意図通りに柔軟に切り替えることができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動制御と手動制御とを設定するための制御設定部における設定が手動制御から自動制御に切り替えられたことを判別し、前記設定が前記手動制御から前記自動制御に切り替えられた場合に、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるとともに、前記自車両の変速比を前記加速変速比に設定させる。
(もっと読む)
車両のトルクリミッタ装置
【課題】動力伝達経路にトルクコンバータ等の流体継手を備えていない車両において、アンチロックブレーキ装置の作動時に過大なトルクが周期的に作用し、低サイクル疲労によってシャフトやギヤ等の耐久性が低下することを簡便な制御で防止する。
【解決手段】アンチロックブレーキ装置90によってブレーキ力が制御されている時には、クラッチC1、C2の係合トルクTC1、TC2、具体的には油圧PC1、PC2が所定の低下率で低下させられるため、動力伝達経路にトルクコンバータ等の流体継手を備えていない本車両においても、クラッチC1またはC2のスリップによりアンチロックブレーキ装置90の作動に伴うトルク変動のピーク値が低くなり、低サイクル疲労による動力伝達経路の各部材の耐久性の低下が抑制される。
(もっと読む)
車両配置決定装置
【課題】運転者や乗員等の要望を反映させて車群内の車両の配置を決定することができる車両配置決定装置を提供する。
【解決手段】
車群内の車両の配置を決定する車両配置決定装置1であって、複数の条件に対して車両ごとに設定された要望度を取得する要望度取得部11と、車群内の配置位置ごとに複数の条件の達成度を設定する達成度設定部12と、要望度及び達成度に基づいて各車両の配置を決定する配置決定部13とを備えることで、複数の条件に対する各車両の要望度を取得し、車群内の配置位置ごとに複数の条件の達成度を設定し、取得した要望度及び設定した達成度に基づいて各車両の配置を決定することができるので、各車両の要望の違いと、配置により得られる達成度の違いとを考慮して配置を決定することができる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間に対する運転支援制御の実施規定の選択を取得し、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、選択された前記実施規定に示される条件を満たすとき、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるための減速制御を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方の道路区間において運転支援制御を実施するか否かを、ユーザが選択することができなかった。
【解決手段】自車両の周辺の道路の特徴を示す特徴情報を取得し、運転支援制御を実施する候補とする道路の特徴を示す候補特徴情報を取得し、前記候補特徴情報に示される特徴と合致する特徴が前記特徴情報に含まれる場合、前記運転支援制御の実施可否を、ユーザに選択させるための案内を行い、前記ユーザの選択を示す情報を取得し、前記ユーザが前記運転支援制御の実施を許可すると選択した場合、前記運転支援制御を行う。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両の走行中運転席ドアが開いている場合にも、車両の走行を可能とする。
【解決手段】車両10に設けられた複数のドア14A、14Cが、走行中に開いているかどうかを検出し、いずれかのドア14A、14Cが開いていると検出されたとき、開いているドアが運転席ドア14Aであるかどうかを判定し、運転席ドア14Aのみが開いていると判定された場合に、車両10の走行を許可するようにしているので、運転席ドア14Aを開けて周りを確認しながら駐車する際、円滑に駐車することができる。
(もっと読む)
乗員保護装置
【課題】より適切な乗員保護を行うことができる乗員保護装置を提供すること。
【解決手段】本発明による乗員保護装置1は、両の乗員の意識の向上又は低下を数値で示す項目Cを検出する意識検出手段3aと、項目Cが第一閾値αにより定められる第一領域内となる場合に、乗員の覚醒を促す覚醒手段6aと、項目Cが第二閾値βにより定められる第二領域内となる場合に、車両を退避させる退避手段3b、3cと、退避手段3b、3cが作動可能であるかを判定する判定手段3dを備えるとともに、項目Cが第二領域内となる場合であって、判定手段3dが退避手段3b、3cは作動可能であると判定する場合に、覚醒手段6aによる覚醒を禁止する禁止手段3eを備えることを特徴とする。
(もっと読む)
車両用障害物回避支援装置及び車両用障害物回避支援方法
【課題】回避操作支援の必要性の判定を精度良く実行可能として、運転者による障害物回避操作をより適切に支援できるようにする。
【解決手段】自車両が所定時間後までの間に障害物と接触することなく走行可能な自車両状態の範囲を回避可能集合として算出する。そして、現在の自車両状態と回避可能集合の境界との関係に基づいて、回避操作支援の必要性の有無の判定を行う。回避操作支援の必要性がある場合には、運転者の回避操作を支援する。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体が規定されている交通ルールを違反した場合でも自車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】移動体の交通ルールに基づいて運転支援を行う運転支援装置1であって、任意の領域において移動体が遵守する可能性の高い交通ルールを取得する交通ルール取得手段11,12,13を備え、交通ルール取得手段で取得した交通ルールに基づいて運転支援を行うことを特徴とし、特に、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない交通ルール逸脱領域を取得する領域取得手段13、あるいは、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない場合には交通ルール取得手段で取得した交通ルールに修正する交通ルール修正手段を備える構成とするとよい。
(もっと読む)
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
161 - 180 / 645
[ Back to top ]