
Fターム[3D041AF09]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | 補正 (645)
Fターム[3D041AF09]に分類される特許
141 - 160 / 645
車両用減速制御装置及びその方法
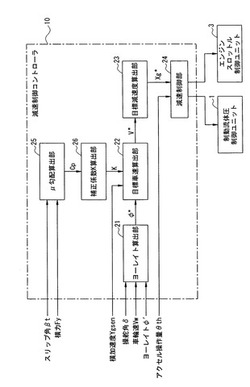
【課題】路面μの推定を必要とせず、路面状態に適合して減速制御する。
【解決手段】車両用減速制御装置は、検出した車輪力(横力Fy)及びスリップ度(スリップ角βt)を基に、車輪のグリップ特性を示すグリップ特性パラメータを得るμ勾配算出部25と、グリップ特性パラメータを基に、補正係数Kを得る補正係数K算出部26と、車両の旋回状態を基に目標車速V*を算出するとともに、該目標車速V*を補正係数Kにより補正する目標車速算出部22と、を備える。
(もっと読む)
障害物回避支援装置

【課題】障害物回避性能の更なる向上を図ることができる障害物回避支援装置を提供する。
【解決手段】障害物回避支援装置は、車輪の制動力を制御することによりアンダーステアを抑制するアンダーステア抑制制御部23と、車輪の制動力を制御することによりオーバーステアを抑制するオーバーステア抑制制御部22とを有する制動力制御装置1と、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援する回避操作支援制御部42を有する電動パワーステアリング装置2と、を備える。回避操作支援制御部42が、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援するように作動しているときには、アンダーステア抑制制御部23のゲインを通常時よりも高くし、オーバーステア抑制制御部22のゲインを通常時よりも低くする。
(もっと読む)
車両の速度制御装置
【課題】カーブを通過する際、運転者の車両を加速させたいという意志に応じて、運転者の違和感が少なく且つ円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ車速制御において、運転者が加速操作を行わない場合(加速操作量Ap=0)に対応する目標車速Vtoが、第1、第2、第3目標車速Vto1,Vto2,Vto3で構成される特性に従って決定される。Vto1は、地点Pcrまで減少して地点Pcrにて適性車速Vqoとなり、Vto2は、地点Pcrから地点Pcaまで適正車速Vqoに維持され、Vto3は、地点Pcaから地点Pcsまで増大する特性に決定される。運転者による加速操作量Apに基づいて修正車速Vzが演算され、制御中に亘ってVtoにVzが加算されて目標車速Vt(=Vto+Vz)が決定される。そして、車速が目標車速Vtを超えないように調整される。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車両
【課題】横追従走行において障害物を有効に回避して追従走行を継続する。
【解決手段】横追従時に、走行を継続した場合の衝突を検知するとブレーキを発動して一旦停止する。その後た障害物との距離と比較し、横追従の車間距離分を移動するのに必要な障害物間の距離を確保するまで進行方向と180°反対の方向へバックさせる。横移動に必要な障害物間の距離を確保した後、処理を縦追従に切り替え、縦追従の車間距離に追従車両の最小旋回半径と追従車両のベクトルで先行車中心から引いた直線の交点を目標点として設定する。縦追従処理開始後は、車間距離を定義された縦車間距離になるまで徐々に車間距離を縮め縦追従に移行する。
(もっと読む)
車両の速度制御装置
【課題】車両がカーブを通過する際において、円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ内にて、車両の減速が完了する地点の基準となる基準地点Pcr、車速の維持が完了する地点の基準となる基準地点Pca、及び、車両の加速制限が完了する地点の基準となる基準地点Pcsが設定される。自車位置Pvhと基準地点Pc#との間の相対距離Lvh#がそれぞれ演算される。車両がPcrを通過するまではLvhrに基づいて演算される目標車速Vto1が、車両がPcrを通過した後はLvhaに基づいて演算される目標車速Vto2が、車両がPcaを通過した後はLvhsに基づいて演算される目標車速Vto3が、目標車速Vtoとして決定される。運転者が加速操作を行わない場合、車速が自車位置における目標車速Vtoを超えないように調整される。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
内燃機関の排気浄化のための制御装置
【課題】 触媒のHC被毒を抑制することによりエミッションを良好に維持することができる内燃機関の制御装置を提供すること。
【解決手段】 制御装置は、排ガス浄化のための触媒を備えた内燃機関に適用される。制御装置は、触媒のHC被毒の程度を吸入空気の積算質量流量に基づいて判断するとともに(ステップ1025又はステップ1065)、触媒が重度のHC被毒となる可能性が高いと判断するとき(ステップ1030)、フューエルカット運転を実行することができない場合(ステップ1015にて「No」と判定される場合)には減速時にリーン運転を実行する(ステップ1055)。
(もっと読む)
内燃機関の制御装置
【課題】自動停止中の内燃機関の再始動性を向上させる。
【解決手段】車両の運転条件に応じて内燃機関1の自動停止・自動再始動を行う内燃機関の制御装置であって、コースト時にも内燃機関1の自動停止・自動再始動が可能な内燃機関の制御装置において、内燃機関1を始動させるモータジェネレータ8と、内燃機関1と駆動輪5との動力伝達経路に設けられ、この動力伝達経路を断続するロックアップ機構を有し、コースト時に、内燃機関1が自動停止し、ロックアップ機構のロックアップが解除されると、スロットル開度を拡大する。これによって、ポンプロスが低減され、内燃機関1の起動トルクが小さくなるので、内燃機関1の自動停止により機関回転数が低下している最中の内燃機関1を必要なときに速やかに再始動させることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 モータトルクを増加することできない状態であっても、発進クラッチのスリップを維持し、発進クラッチの締結時のショックやエンジン始動時の回転変動が駆動輪側に伝達しないようにできるハイブリッド車両の制御装置を提供すること。
【解決手段】 入力軸回転数が入力軸回転数目標値より小さいときにはトルク容量目標値を減少補正するようにした。
(もっと読む)
周辺車両監視装置及び周辺車両監視方法
【課題】交通事故の発生をより高い確率で抑止し、運転者のストレスを低減する。
【解決手段】自車両と先行車両との間に一定の車間距離があり、自車両の隣接車線を走行する周辺車両が自車両の斜め前方を走行している状況において、周辺車両の挙動から該当周辺車両が自車両と先行車両との間に割り込みを行うと予測される。そして、運転者に対して割り込みの可能性が報知されるとともに先行車両との車間距離を更に取る様にアドバイスされ、状況によっては自車両の制動制御が自動的に行なわれる。この様にして、周辺車両の微妙な挙動から起こりうる危険な状況を予測して未然に回避することによって、運転者の交通事故回避に対するストレスを軽減させ、交通事故の防止を図ることができる。
(もっと読む)
車両の制御装置
【課題】複数の要求値の調停処理を繰り返して制御目標値を設定する車両において、要求値の追加あるいは削除を行なう際の調停処理ロジックの変更量を低減する。
【解決手段】この制御装置は、PDRM9010および複数の駆動力要求システム(9030〜9033)からの要求駆動力を調停する駆動力調停部9020と、ギヤ段変換部9110および複数のギヤ段要求システム(9130〜9132)からの要求ギヤ段を調停するギヤ段調停部9120と、トルク変換部9210および複数のトルク要求システム(9230、9231)からの要求トルクを調停するトルク調停部9220とを備える。さらに、この制御装置は、各要求システムで設定された要求値の各々に、各調停処理で共通して用いられる優先順位を付与するID付与部9300を備える。
(もっと読む)
車速制御装置
【課題】運転者の意思に応じた目標車速を設定する車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて自車の車速を制御する車速制御装置1であって、運転者の減速操作を検出する減速操作検出手段12と、減速操作検出手段12で検出した減速操作に基づいて自車の目標車速を設定する目標車速設定手段34と、自車周辺の物体を検出する周辺物体検出手段10,11,32とを備え、目標車速設定手段34は、周辺物体検出手段10,11,32で自車周辺の先行車以外の物体を検出した場合、減速操作に基づく目標車速の設定を行わないことを特徴とする。
(もっと読む)
車両用操舵装置
【課題】制駆動を伴う低速時の転舵に必要な力を低減する。
【解決手段】キングピン軸の下方向きの延長線と、キングピン軸に対応する転舵輪の接地面との交点が、転舵輪のタイヤのトレッド面よりも車両の車幅方向内側に位置するように構成され、操舵時に転舵輪WFL,WFRがキングピン軸を中心として回動することで中立位置から移動するように構成された懸架装置を備えた車両用操舵装置であって、車両の旋回時に、旋回方向内側となる転舵輪が中立位置から移動する移動量と、旋回方向外側となる転舵輪が中立位置から移動する移動量と、を求め、これらの移動量の比または差に応じて、それぞれの転舵輪に加える制駆動力を制御するようにした。
(もっと読む)
車両の車線逸脱警報装置
【課題】自車両が走行している車線の走行区分線を検知することで、自車両の走行環境に応じて走行安全性と頻繁な警報作動の防止との両立を図ることができる車両の車線逸脱警報装置を提供する。
【解決手段】S10の判定の結果、Noの場合、左走行区分線Laが実線で右走行区分線Laが破線か否か判定し、Yesの場合、右側方或いは右斜め後に他車両CBが走行しているか否か判定する。S19の判定の結果、右側方或いは右斜め後に他車両CBが存在しない場合、左走行区分線Laに対して第2判定ラインLd2、右走行区分線Laに対して第1判定ラインLd1を夫々設定し、S5の車線逸脱判定ステップに移行する。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作度合のみならず、車両の安全走行の観点から、車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の運転操舵度合Ddが低いほど支援閾値THが低く設定される。そして、車両の安全走行のために必要な車両1の運転支援量Spが支援閾値TH_Sp以下であることを要件として、操舵装置11および制動装置12のうち一方または両方の動作が制御される。これにより、車両1の運転操作度合Ddが低くても、車両1の運転支援の必要性が低い場合には操舵装置11等の動作が制御される確率が低くなる。その一方、運転操舵度合Ddが高くても、車両1の運転支援の必要性が高い場合には操舵装置11等の動作が制御される確率が高くなる。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、ドライバから減速要求があったとき、排気環流を実施していても、適正に車両駆動トルクを低下させると共に内燃機関の燃焼悪化を抑制可能とする。
【解決手段】減速トルク発生手段として吸気可変動弁機構25を適用し、燃焼悪化抑制手段として電子スロットル装置34を適用し、制御手段としてのエンジンECU111は、EGR弁40によりEGR通路39を開放し、排気管36の排気ガスの一部をEGR通路39を通して吸気マニホールド29に還流している状態で、ドライバから減速要求があったときには、電子スロットル装置34を制御してスロットル弁33の開度を維持したままで、吸気可変動弁機構25により吸気弁21の閉止時期及び開放期間を変更する。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構10に操舵力を付与する車線逸脱防止制御ユニット100を、走行車線に対する自車両の横速度を検出する横速度検出手段140と、走行車線内に設定した目標横位置Xcと自車両の横位置Xeとの偏差ΔXを積分することにより、走行車線からの逸脱を防止する方向へ第1の操舵力を設定する第1の操舵力設定手段(偏差制御操舵力算出手段)130と、横速度に基づいて走行車線からの逸脱を防止する方向へ第2の操舵力を設定する第2の操舵力設定手段(横速度制御操舵力算出手段)150と、第1の操舵力と第2の操舵力に基づいて目標操舵力を設定する目標操舵力設定手段160と、操舵機構に操舵力を付与する操舵力制御手段170とを備える構成とする。
(もっと読む)
変速機付エンジンの制御装置。
【課題】慣らし運転時のアップシフトのタイミングを的確に把握することができると共に、慣らし運転中であっても緊急時に必要な駆動力を得ることができるようにする。
【解決手段】車両の総走行距離Dに基づいて慣らし上限エンジン回転数Naを設定し(S3)、この慣らし上限エンジン回転数Naに基づいて変速段毎の慣らし上限車速Saを設定する(S4)。そして車体の加速度Gxに基づき設定時間t後の推定車速Smを算出し(S12)、推定車速Smが慣らし上限車速Saを超えている場合、予告警報フラグF1をセットする(S14)。予告警報フラグF1がセットされると、スピーカからエンジン回転数Neが許容回転をオーバーする旨の音声が出力され、運転者に注意を喚起する。運転者はスピーカからの音声を認識することで、アクセルペダルの踏込みを緩める等してアップシフトさせる。
(もっと読む)
141 - 160 / 645
[ Back to top ]