
Fターム[3D041AF09]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | 補正 (645)
Fターム[3D041AF09]に分類される特許
101 - 120 / 645
駆動力制御装置
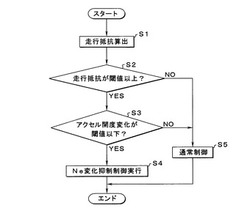
【課題】車両が定常走行状態にあるときに、運転者の意図または道路状況に合わせて、エンジン回転数の変化を抑制できる駆動力制御装置を提供する。
【解決手段】車両が走行するための動力を発生させるエンジンと、エンジンの出力側に動力伝達可能に接続された変速機とを有し、変速機の変速比を制御してエンジン回転数を制御する駆動力制御装置において、車両が定常走行状態にあるか否かを検出する走行状態検出手段(ステップS3)と、車両の走行抵抗を検出する走行抵抗検出手段(ステップS2)と、車両が定常走行状態にある場合は、車両の走行抵抗に応じてエンジン回転数の制御内容を変更するエンジン回転数制御手段(ステップS4,S5)とを備えている。
(もっと読む)
ハイブリッド車両の制御装置

【課題】ドライバーの加速フィーリングの向上を図ると共に、車両パワーを円滑に推移させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを有する駆動源と、モータMGと駆動輪LT,RTとの間に配置された無段変速機CVTとを駆動系に備えると共に、無段変速機CVTの変速制御を実行する変速制御手段(図5)を備えたハイブリッド車両の制御装置において、モータMG及びバッテリ9の状態から、モータアシスト可能なアシストパワー量を算出するアシストパワー量算出手段(ステップS4)を備えている。そして、変速制御手段(図5)は、無段変速機CVTの変速比をダウンシフト方向に変速する車両加速中に、この変速比をアップシフト方向に間欠的に変速する。さらに、このアップシフトに伴って生じるエンジンパワー減少量は、アシストパワー量以下にする。
(もっと読む)
車両の制振制御装置
【課題】 車両の制振制御等に於いて、参照される車輪トルクを推定する際にその推定が良好に実行できない事情を考慮して制御を実行すること。
【解決手段】 本発明の車両の駆動力を制御することにより車両のピッチ又はバウンス振動を抑制する制振制御装置は、車輪と路面との接地個所に於いて発生する車輪に作用する車輪トルク推定値を取得する車輪トルク推定値取得部と、車輪トルク推定値に基づいてピッチ又はバウンス振動振幅を抑制するよう車両の駆動力を制御する駆動力制御部とを含み、更に、車輪のスリップ状態を示す車輪スリップ状態量を取得するスリップ状態量取得部が設けられ、車輪スリップ状態量が表すスリップの程度が大きいほど駆動力の制御量を小さく補正することを特徴とする。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両運転支援装置
【課題】道路インフラ側の整備や交信機能の普及向上を要することなく、逆光によって運転者に見え難くなった交通信号機や道路標識などの交通情報を認識可能にして、その交通情報に従った対応を行なうことで、運転者が交通情報を見落として重大な事故を引き起こすことを未然に且つ確実に防止する。
【解決手段】車両前方画像から交通情報の存在する領域が分割され、その領域の明度分散が算出され、明度分散が所定値を超える領域が候補領域として認識される。候補領域が認識されると、その候補領域における交通情報の認識が可能になる絞り値が、その候補領域の明度分散に基づいて算出され、その絞り値で車両前方画像が再撮像される。
(もっと読む)
トロイダル無段変速作業車両
【課題】アクセルレバーに基づく一定車速の作業走行を可能とする前後進無段変速伝動装置の定速走行制御において、簡易なブレーキ操作による減速調節を可能とするトロイダル無段変速作業車両を提供することにある。
【解決手段】トロイダル無段変速作業車両は、ブレーキペダル(M)の操作に応じて制動減速する制動装置と、バリエータ比制御により停止速伝動(GN)を含む無段変速伝動をする前後進無段変速伝動装置(2)と、この前後進無段変速伝動装置(2)を制御することにより、前後進切替レバー(K)とアクセルレバー(L)の指示に基づく定速走行制御により一定車速走行を可能とする制御装置(61)とを備えて構成され、この制御装置(61)は、定速走行制御の際に、ブレーキペダル(M)の操作に応じて停止速伝動(GN)に向けて制御する減速制御に切替えるものである。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、通常時には操舵角制御を反映した実際のタイヤ切れ角に基づいた制動力制御を行う一方、オーバーステア発生時にはタイヤ切れ角の変化が不連続になることによる制動力制御の制御性の悪化を抑制し、或いは、制動力制御に用いる操舵角信号を車両状態に応じて使い分けて、状況に応じた制動力制御の制御性を確保する。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30とを備え、操舵制御ECUが車両オーバーステア時に補正するオーバーステア時操舵角補正量を、制動及びエンジン制御ECUが車両制動力の制御に用いる操舵角信号に反映させないように構成されていることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】リヤトーコントロール装置が故障した場合に、操舵反力を付与し得る電動パワーステアリング装置の制御を適正にしてヨーモーメントの打ち消し易くする。
【解決手段】ステップ1で故障信号Sfの入力によってリヤトーコントロール装置11の故障が判定され(Yes)、ステップ6で左右の後輪5l,5rのトー角δrl,δrrが非対称と判定された場合(No)、故障時用のヨーレイト反力成分マップを参照してヨーレイト反力成分Tbγを正常時よりも大きく設定し(ステップ7)、故障時用の操舵角反力成分マップを参照して操舵角反力成分Tbθを正常時よりも小さく設定する(ステップ8)。
(もっと読む)
車両の駆動トルク制御装置
【課題】エンジンにより駆動される補機の機能への影響をできるだけ抑えつつ車両の駆動トルクが所要の値になるようエンジンの出力トルク及び補機の消費トルクを制御する。
【解決手段】車両の目標駆動トルクTvtが演算され(ブロック100〜120)、目標駆動トルクの低周波成分がエンジン14の目標制御トルクに分配されると共に、低周波成分以外の目標駆動トルクの成分が補機としてのコンプレッサ34及びオルタネータ36の目標制御トルクに分配される(ブロック130)。そしてエンジンの目標制御トルクTetと補機の必要消費トルクTcreq、Tareqとの和に基づいてエンジンの出力トルクが制御され、補機の必要消費トルクより補機の目標制御トルクを減算した値に基づいて補機の消費トルクが制御される(ブロック150〜180)。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】変速部と電動機とを備える車両用動力伝達装置において、変速ショックの低減と燃費向上とを両立させつつドライバビリティの低下を抑制する。
【解決手段】コースト走行中の第2電動機M2による回生時に自動変速部20のダウンシフトを実行する際は単一変速又は飛び変速により実行されるので、例えば第2電動機M2による回生中には燃費が向上させられる。特に、飛び変速時には単一変速時に比べて燃費が一層向上させられる。また、変速ショックが増大する可能性の高い低作動油温時には、単一変速時に比べて元々変速ショックが生じ易い飛び変速が禁止されるので、変速ショックが増大してしまうことが回避される。
(もっと読む)
車両の運動制御装置
【課題】日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】車両の横滑り情報から算出したヨーモーメント制御指令に基づいて、四輪のうちの左右輪に異なる制駆動力を発生するモードで実現される車両前後加速度が、横運動に連係した加減速制御指令との差が近くなるように四輪のうちの左右輪に略等しい制駆動力を加えるように補正制御する。
(もっと読む)
前後加速度制御装置
【課題】外乱によるフィードフォワード制御の精度低下を補完し、前後加速度制御性能を向上させる。
【解決手段】パワトレフィードフォワードトルクの信頼性が外乱要因による推定ブレーキトルクの信頼度の低下に伴って低下するため、パワトレフィードバックトルクをブレーキ信頼性を加味したパワトレトルクの信頼度に応じて補正する。また、ブレーキフィードフォワードトルクの信頼性が外乱要因による推定パワトレトルクの信頼度の低下に伴って低下するため、ブレーキフィードバックトルクをパワトレ信頼性を加味したブレーキトルクの信頼度に応じて補正する。これらにより、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクの信頼性の低下分をパワトレフィードバックトルクもしくはブレーキフィードバックトルクの補正によって補完することが可能となる。
(もっと読む)
車間距離制御装置
【課題】 車速変動を低減して燃費悪化を抑制することを可能とした車間距離制御装置を提供する。
【解決手段】 レーダ11、12やカメラ21、22、車々間通信機41等で取得した隣接車線を含む他車両の状況、車線の状態といった車両の走行環境から車間制御ECU31は、先行車両と自車両との間に他車両が割り込んでくる割り込み可能性を判定し、当該割り込み可能性が低いと判定した場合には、そうでない場合に比較して先行車両との車間距離が長くなるようエンジンECU51、ブレーキECU61により、車両の加減速状態を制御する。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】オートクルーズ制御がオンの状態で、ブレーキ操作を行わなくてもカーブ路を走行できるか否かの情報をユーザに提供する。
【解決手段】道路情報を取得し、取得した道路情報、および、定速走行制御時の一定速度に基づいて、定速走行制御中に一定速度でカーブ路を走行する際に必要となる必要旋回ヨーモーメントを算出するとともに、定速走行制御中に一定速度でカーブ路を走行する際に、車両が走行可能な限界ヨーモーメントを算出する。そして、車両がカーブ路に進入する前に、必要旋回ヨーモーメント65および限界ヨーモーメント64を、表示装置に表示させる。
(もっと読む)
変速制御装置およびそれを備えた自動二輪車
【課題】手動モード運転と自動モード運転とを切換可能な自動二輪車において、リンプホーム性を向上させる。
【解決手段】変速制御装置50は、有段のドグクラッチ式のシフト機構43と、シフト機構43のギアポジションを変更するシフトアクチュエータ70と、クラッチ44と、クラッチアクチュエータ60と、運転者によって操作され、シフトアクチュエータ70およびクラッチアクチュエータ60によるシフト機構43のギアポジションの変更を指示するシフトスイッチ72と、運転者によって操作され、手動モード運転と自動モード運転とを切り換えるモード切換スイッチ71と、ECU90とを備えている。ECU90は、所定の故障時に、自動モード運転を規制しかつ手動モード運転を許可する運転許可部93を有している。
(もっと読む)
車両
【課題】先行車両に対して安定した並走追従走行をすること。
【解決手段】追従車両3は、前後方向の制御と左右方向の制御を行うことにより、先行車両2に対して並走追従走行を行う。前後方向の制御は、フィードバック制御と、フィードフォワード制御を行う。フィードフォワード制御では、先行車両2から送信されてくる目標車速を、先行車両2が旋回する際に、追従車両3が先行車両2の内外周を走行することによる速度の増減で補正した値を用いる。左右方向の制御では、方位角φと相対角θを収束させる。この際に、追従車両3は、自車両の代表点7から先行車両2に対する目標点5までの目標点距離Δmを用いて、φとθの何れを優先的に制御するかを判断する。更に、目標点距離Δmが小さい場合、即ち、追従車両3と先行車両2が近接している場合には、φを制御する際のゲインを小さくする。
(もっと読む)
車両用加減速制御装置及びその方法
【課題】ナビゲーションシステムによる経路誘導の終了によりカーブ手前で減速制御が終了する場合でも、該カーブに対して有効に減速させる。
【解決手段】車両用加減速制御装置は、ナビゲーション装置14による車両の経路誘導時に、その誘導経路を基に、車両前方のカーブを検出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が検出したカーブに対応して車両を減速制御する目標車速演算部42等と、車両からみてナビゲーション装置14の経路誘導終了地点よりも遠方に制御対象のカーブが存在するときには、減速制御の制御内容を、該経路誘導終了地点に対応したものに変更する目標車速指令値演算部45と、を備える。
(もっと読む)
車両の制駆動制御装置及び制駆動制御方法
【課題】変速の有無に関係なく、応答良く車両を減速出来る車両の制動制御を課題とする。
【解決手段】変速機ATがコーストフリーの変速段の状態でアクセルオフを検出すると、変速の有無に関係無く、車両減速のための制動を制動装置BRKを介して車輪に付与する。
(もっと読む)
車間距離制御装置
【課題】運転者による加減速操作に応じて目標車間距離を変更した場合にドライバビリティの悪化を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、自車と先行車との車間距離を取得する車間距離取得手段と、運転者の加速操作又は減速操作に応じて車間距離に基づいて目標車間距離を変更する目標車間距離変更手段と、自車と先行車との相対速度を取得する相対速度取得手段とを備え、目標車間距離変更手段は、加速操作終了が検出された後又は減速操作終了が検出された後に、自車と先行車との相対速度が零になったときの車間距離に基づいて目標車間距離を変更することを特徴とする。
(もっと読む)
運転支援システム
【課題】追従走行制御時にて車両の燃費性能を向上できる運転支援システムを提供すること。
【解決手段】この運転支援システム1は、自車と前車との車間距離を所定の目標車間距離に制御する追従走行制御ならびに自車の車速を所定の目標車速に制御する車速維持制御を行い得る。運転支援システム1は、前車の速度変動を判定する速度変動判定手段32と、先方車両の車速を取得する先方車両車速取得手段23と、自車の目標車速を再設定する目標車速再設定手段33とを備える。そして、前車の速度変動が所定の閾値よりも大きいと判定されたときに、追従走行制御が中断あるいは中止される。また、自車の目標車速が先方車両の車速に基づき再設定されて車速維持制御が行われる。
(もっと読む)
101 - 120 / 645
[ Back to top ]