
Fターム[3D045BB37]の内容
ブレーキシステム(液圧制御弁) (1,262) | 目的、効果 (275) | 車両安定性 (129)
Fターム[3D045BB37]の下位に属するFターム
左右(スプリット路) (2)
低摩擦路面(雨、雪) (8)
旋回時 (9)
Fターム[3D045BB37]に分類される特許
1 - 20 / 110
自動二輪車のブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
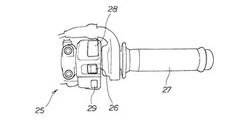
【解決手段】公道走行とサーキット走行などのような走行環境変化や、乾いた路面と濡れた路面のような路面状況変化に対応可能な第1制御モードと第2制御モードを備える。そして、モード切替手段26を、右グリップ27より車体中心側に、上位のキルスイッチ28と下位のスタータスイッチ29との間に配置する。モード切替手段26で、第1制御モードと第2制御モードを切り替える。
【効果】第1制御モードと第2制御モードを任意に切替えることで、走行環境変化に対応した自動二輪車の制動制御が可能となる。
(もっと読む)
自動二輪車用ブレーキ装置

【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】第2モード第1区間の始点から第2モード第2区間の終点までの間の途中の点Pmで、操作量に対する前輪の制動力の増加率を、変化させる。点Pmまでの操作量の増加率は、曲線の傾きα1で表すことができる。点Pm以降の操作量の増加率は、曲線の傾きα2とする。好ましくは、α1<α2に設定する。
【効果】途中までの増加率より、途中以降の増加率を大きく設定することで、操作量に車体発生源速度を一次比例させることができる。操作量に車体発生源速度を一次比例させると、制動の初期(操作量が小さいとき)においては姿勢制御優先で前後輪の制動力の変化量を小さくすることができ、制動の後半(操作量が大きいとき)においては制動作用が優先される。
(もっと読む)
制動力制御装置
【課題】悪路走行時においても好適にEBD制御を実施可能とする。
【解決手段】制動力制御装置は、左後輪(WRL)に対応する第1油圧系統及び右後輪(WRR)に対応する第2油圧系統を備える車両の制動力を制御する。制動力制御装置は、各車輪の車輪速度を検出する車輪速度検出手段(83)と、後輪の車輪速度が所定の条件を満たした場合に、前輪及び後輪の動作量の差に基づいて第1及び第2油圧系統を制御することで、左後輪及び右後輪の制動力制御を独立して行う制御手段(110,120)と、車両が悪路を走行していることを検出する悪路検出手段(130)と、車両が悪路を走行していることが検出されており、左右いずれかの後輪の車輪速度が所定の条件を満たしている場合に、左後輪及び右後輪の各々のブレーキ油圧を油圧保持制御するよう制御手段を制御する油圧保持制御手段(140)とを備える。
(もっと読む)
車両の制動制御装置、車両の制御装置及び車両の制動制御方法
【課題】車両を停車させる場合に車輪に対する制動力を小さくするブレーキ操作を運転手が行ったとしても、運転手の意図しない車両の移動を抑制することができる車両の制動制御装置、車両の制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に対する制動力を小さくするブレーキ操作が運転手によって行われた場合において、マスタシリンダ内のMC圧Pmcが、路面の勾配に応じた値に設定された勾配相当MC圧Pmctha以下になった第2のタイミングt12で、車輪に対する制動力を保持する第1制動制御を開始し、その後、路面の勾配が急勾配側に変化した場合に、車輪に対する制動力を増大させる第2制動制御を開始する(第3のタイミングt13)。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
制動装置及び車両
【課題】制動時の車体の偏向を効果的に抑制することができる制動装置及び車両を提供することを目的とする。
【解決手段】車体と、車体に制動力を作用させる制動装置と、を有し、制動装置は、供給する油圧の差、ブレーキ性能の差等の機械的構造や、算出する式の差等の電気的設定により、初期設定として、運転手が乗車した状態で、車体の進行方向に直交する方向において、重心に近い側の制動力を、重心に遠い側の制動力よりも大きくすることで、上記課題を解決する。
(もっと読む)
自動二輪車のブレーキ制御装置
【課題】前後輪連動ブレーキ・バイ・ワイヤ方式のブレーキシステムにおいて、ABS作動により、スポーツ走行機能が低下しないようにする。
【解決手段】ブレーキ連動判別部36は、後輪側のブレーキ操作(ペダルの操作)による入力液圧が連動ブレーキ開始圧力値以上になったときに前輪ブレーキを開始させる。連動ブレーキ開始圧力値は、スイッチ40によりABS作動時とABS非作動時とで切り替え可能にする。ABS作動時は連動ブレーキ開始圧力値として下部圧力値を選択し、ABS非作動時は連動ブレーキ開始圧力値として上部圧力値を選択する。
(もっと読む)
ブレーキシステムを制御する方法
【課題】制動下で車両の後車軸が持ち上がるのを防止することを目的とした、車両のブレーキシステムを制御する方法を提供する。
【解決手段】より詳細には、本発明は、少なくとも1つの前輪および少なくとも1つの後輪を備える車両のブレーキシステム(19)を制御するための方法であって、後輪が持ち上がる少なくとも1つの状態が存在するかどうかを判定するステップと、そうした状態が存在する場合に、車両のブレーキシステムによって前輪に加えられる制動の作用力を制限および/または低減するステップとを含むことを特徴とする方法に関する。
(もっと読む)
ブレーキ制御装置
【課題】増圧制御弁の個体差による昇圧性能バラツキに起因して、所望の制動力が得られなくなることを抑制する。
【解決手段】高μ路側の前輪FR、FLと対応する増圧制御弁17、37にて第1差圧Plowを第1時間Tlow継続し、第2差圧Phighを第2時間Thigh継続することを繰り返すことで、高μ路側の車輪のW/C圧を緩増圧する。したがって、W/C圧の昇圧性能のばらつきを抑制することができ、左右前輪FR、FLのW/C圧の差圧を一定範囲に抑えることが可能になる。これにより、車両に加わるヨートルクを抑制でき、スピンを防止することが可能になる。そして、第1差圧Plowを一定値にせずに、段階的に徐々に低下させていくことで、第1、第3増圧制御弁17、37の個体差に起因した発生させられる差圧のばらつきを緩増圧中に更に低減することができる。
(もっと読む)
車両用制御装置
【課題】被牽引車両の牽引時及び非牽引時の双方において、車両の制動性と走行安定性とを両立することができる車両用制御装置を提供すること。
【解決手段】車両2の減速度Dが車速Vに応じて予め設定された所定値Da以上の場合に車両2の後輪制動力を前輪制動力に比較して制限する配分制御を行う制御手段54を備える車両用制御装置において、車両2が被牽引車両4を牽引しているか否かを判定する判定手段52を更に備える。制御手段54は、判定手段52により車両2が被牽引車両4を牽引していると判定された場合、上記配分制御を行わない。
(もっと読む)
ブレーキ前後配分制御装置
【課題】タイヤ内圧が低い場合の走行燃費を向上する。
【解決手段】前後輪のタイヤ内圧センサ20,21により検出された前後輪のタイヤ内圧信号が入力する各タイヤ内圧平均算出部42,43と、タイヤ内圧平均値の前後輪間の差に応じて前後のブレーキ力配分を設定するブレーキ配分変更設定部45と、ブレーキ圧に応じて前後の通常ブレーキ配分を設定するブレーキ前後配分設定部46と、タイヤ内圧により設定されたブレーキ力配分と通常ブレーキ配分との重みづけのゲインを設定するゲイン補正部47と、それらに基づいて前後のブレーキ力配分を設定するブレーキ前後配分設定部48とを設ける。前後輪の各タイヤ内圧の低い方を、ブレーキ力を大きくして内圧の上昇を早め、走行開始時から早い段階で前後輪の各タイヤ内圧を適正値にして、転がり抵抗の少ない走行を行うことができるようになり、走行燃費を向上し得る。
(もっと読む)
制動装置
【課題】簡単且つ低コストな構造でありながら、車両の走行状態やブレーキペダルの操作状態に対応した適切な制動力配分を得ることができる制動装置を提供する。
【解決手段】制動装置10は、前輪に連通する前輪側マスタシリンダ12と、後輪に連通する後輪側マスタシリンダ14と、前記前輪側マスタシリンダ12及び前記後輪側マスタシリンダ14に液圧を発生させるブレーキペダル11とを備え、車両に制動力を付与する装置である。この制動装置10は、前記後輪側マスタシリンダ14を構成する第2マスタシリンダ14bと前記ブレーキペダル11との間に、該ブレーキペダル11の踏力を減衰する減衰機構36を設けて構成されている。
(もっと読む)
電気自動車の回生制動制御装置
【課題】
電気自動車の回生制動制御装置に関し、良好な制動フィーリングを実現しつつ、エネルギ回収効率を好適にする。
【解決手段】
電気自動車の回生制動制御装置であって、第1摩擦制動装置15bによる機械的制動トルクの推定値である第1機械的制動トルクTmRを、制動が駆動輪11bと路面間の最大摩擦力でなされたと仮定した時の制動トルクである第1理想制動トルクTIRよりも小さくなるように設定する第1機械的制動トルク推定手段22と、第1理想制動トルクTIRと第1機械的制動トルクTmRとの差を目標回生制動トルクTCとして算出する目標回生制動トルク推定手段23とを備えて構成する。
(もっと読む)
自動車両制動装置
【課題】自動制動時における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、自動制動制御を行う際にはディスクブレーキ31に付与する油圧の調整のみで車両1の減速度の調整を行う自動制動制御部87を設ける。これにより、自動制動制御を行う場合にはドラムブレーキ35の制動力は調整しないので、制動力の制御が難しいドラムブレーキ35の制動力を調整することに起因して車両1の減速度が安定しなくなることを抑制できる。この結果、自動制動時における制動の安定性を図ることができる。
(もっと読む)
自動車両制動装置
【課題】自動制動時の制動初期における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、前輪6の制動力を検出可能な前輪前後力センサ55を設ける。自動制動制御部で自動制動制御を行う際には、前輪前後力センサ55で前輪実制動力を検出し、ドラムブレーキ35の制動力が不安定な期間は前輪前後力センサ55による検出結果のみで制動力のフィードバック制御を行う。これにより、制動力が不安定な期間におけるドラムブレーキ35の制動力は、ディスクブレーキ31及びドラムブレーキ35の油圧の制御には反映されないため、不安定な制動力がフィードバックされることに起因して制動力が不安定になることを抑制できる。この結果、自動制動時の制動初期における制動の安定性を図ることができる。
(もっと読む)
ブレーキ装置
【課題】
実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供する。
【解決手段】
本ブレーキ装置は、ブレーキペダル操作によるペダルストローク又はペダル踏力を検出するペダル操作検出部と、車両の各車輪に設けられ前記ペダル操作検出部の検出値に応じた推力を発生するブレーキキャリパと、前記各車輪の接地荷重を推定する接地荷重推定部と、前記接地荷重推定部の推定値に基づき車両の左右輪で接地荷重差がある状態で制動したと判断した後、当該制動若しくはそれ以前の制動と同じペダルストローク又はペダル踏力を前記ペダル操作検出部が検出しても、前記判断以前とは異なるキャリパ推力を発生させる推力発生部を備える。
(もっと読む)
二輪車用ブレーキ装置
【課題】 後輪の接地荷重を確保して安定的かつ効果的な制動を行う二輪車用ブレーキ装置を提供する。
【解決手段】 車体の減速度を算出する車体減速度算出手段と、車輪に設けられた液圧発生手段の液圧を制御する液圧制御手段と、液圧制御手段をコントロールするコントロールユニットを備えた二輪車用ブレーキ制御装置において、コントロールユニットは目標減速度設定手段を備え、前輪に設けられた液圧制御手段の液圧を少なくとも減圧することにより、車体減速度を前記目標減速度に収束させることとした。
(もっと読む)
車両制動制御装置
【課題】車両の左右軸重の偏りによる制動時の偏向を安価に抑制することを目的とする。
【解決手段】イグニッションスイッチがドライバによってオンされた場合に、車両制動制御ECU12が、シートベルト警告灯点灯回路14から出力されるシートベルト警告灯信号を取得し、乗員が助手席に乗車したか否かを判断する。そして、乗員が助手席に乗車した場合には、車両の左右の重量差はないものとして、車両制動偏向抑制手段18は制御せず、また、乗員が助手席に乗車していない場合には、ドライバ単独の運転と判断でき、車両の左右の重量差が発生するので、重量差に応じて車両制動偏向抑制手段18を制御する。
(もっと読む)
車両の姿勢制御装置
【課題】 ノーズダイブ抑制時における車両姿勢の乱れや不自然な減速感を防止する車両の姿勢制御装置を提供する。
【解決手段】 VSA−ECU21は、ステップS1でダンパECU22によってノーズダイブ抑制制御が行われているか否かを判定し、この判定がYesであれば、ステップS2で左右後輪3rl,3rr側の制動力配分を小さくする。具体的には、EBD作動時割合より大きいノーズダイブ抑制時割合(例えば、6%)だけ、左右後輪3rl,3rr側の車輪速wrが左右前輪3fl,3fr側の車輪速wfよりも高くなるように、油圧ユニット24を駆動制御する。これにより、ノーズダイブ抑制制御によって減衰力可変ダンパの目標減衰力が高められて後輪の接地荷重が減少しても、左右後輪3rl,3rr側に過剰な制動力が作用しなくなり、旋回中の制動時において車両姿勢に乱れが生じたり、運転者が不自然な減速感を覚えたりすることがなくなる。
(もっと読む)
1 - 20 / 110
[ Back to top ]