
Fターム[3D046GG00]の内容
ブレーキシステム(制動力調整) (22,399) | ブレーキ系以外の制御系との関連制御 (1,166)
Fターム[3D046GG00]の下位に属するFターム
推進装置 (571)
伝達装置 (234)
懸架装置(サスペンション) (64)
ステアリング装置 (217)
電源装置 (54)
Fターム[3D046GG00]に分類される特許
1 - 20 / 26
安全装置
【課題】潜り込み後の衝突が発生した場合でも、乗員を衝突から適切に保護することができる安全装置を提供すること。
【解決手段】本発明による安全装置1は、車両の前方端部が前方障害物に対して衝突することなく前方障害物の下方に潜り込み、前記車両の乗員と前記前方障害物が直接衝突する可能性を有すること、つまりは潜り込みを検出する検出手段6を備えることを特徴とすることを特徴とする。
(もっと読む)
車両用安全装置

【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
車両の障害物認識装置
【課題】自車両前方の障害物を検知する障害物検知手段(レーダ装置1)を備えた車両の障害物認識装置において、ヨーレートセンサ13の検出値と自車両Wの車速を検出する車速検出手段(車速センサ12)により検出された車速とに基づいて自車両Wの進行路を推定する場合に、自車両Wの走行状況に応じて、その推定を出来る限り正確に行えるようにする。
【解決手段】車速検出手段により検出された車速に応じて、ヨーレートセンサ13の検出値を補正する。具体的には、車速検出手段により検出された車速が所定車速以上であるときには、該所定車速よりも小さいときに比べて、ローパスフィルタのカットオフ周波数を低くする。
(もっと読む)
車両の障害物検知装置
【課題】急なカーブで障害物検知手段(レーダ装置)が対向車Qをいきなり検知したときであっても、その対向車Qの進行方向を正確に推定して、自車両Wの対向車Qへの衝突可能性を正確に予知する。
【解決手段】対向車Qについて検出された複数(A点〜E点)の相対位置(対向車Qの自車両Wに対する相対位置)に基づいて、該対向車Qの前面が自車両Wに対して向いている方向を推定し、この推定された対向車前面の向きに基づいて、該対向車の進行方向を推定し、自車両Wの進行路と、上記推定された対向車の進行方向と、該対向車について検出された相対位置及び相対速度ベクトルの大きさとに基づいて、自車両Wの該対向車Qへの衝突の可能性を予知する。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】電動パーキングブレーキの構成要素の耐久性を高める必要を廃することができる電動パーキングブレーキ制御装置を提供すること。
【解決手段】本発明による電動パーキングブレーキ制御装置1は、車両のドラムブレーキ7の作動力を制御する作動力制御手段2aと、ドラムブレーキ7の制動力不足を検出する制動力不足検出手段2bと、制動力不足検出手段2bが制動力不足を検出した場合に、制動力不足検出手段2bが制動力不足を検出しなくなるまで作動力を増加させる作動力増加手段2cと、車両の位置を検出する位置検出手段9aと、作動力増加手段2cが作動力を増加させた場合に、作動力の増加分と位置検出手段9aの検出した車両の位置を記憶する記憶手段9bを備えると共に、記憶された車両の位置において再度車両を停止させる場合に、作動力増加手段2cが記憶された作動力の増加分だけ一度に作動力を増加させることを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】不必要な障害物検知装置の作動を抑制する。
【解決手段】本発明は、車両前方の障害物を検知するレーダ装置と、レーダ装置からの障害物検知情報に基づいて車両の作動機器を所定の作動条件で制御する作動機器制御手段とを備えた車両の障害物検知装置において、運転者の運転操作状態を検知する運転操作状態検知手段と、運転操作検知状態手段が検知した運転者の運転操作状態に基づいて前記作動機器の作動条件を所定の作動条件から変更する作動条件変更手段とを有することを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知装置の障害物の誤検知を抑制する。
【解決手段】本発明は、所定の発信範囲に発信した電波の反射波を受信して反射波の強度が所定のしきい値以上であるときに発信範囲内に障害物が存在すると検知するレーダ装置と、レーダ装置からの障害物検知情報に基づいて車両の作動機器を制御する作動機器制御手段とを備えた車両の障害物検知装置において、運転者の運転操作状態を検知する運転操作状態検知手段と、運転操作状態検知手段が検知した運転者の運転操作状態に基づいてレーダ装置の障害物検知能力を変更する検知能力変更手段を有することを特徴とする。
(もっと読む)
ブレーキ制御装置およびディスプレイ制御装置
【課題】車両に設けられたディスプレイの使い勝手をよくすることである。具体的には、車両の停止状態において、テレビスイッチがON状態にある場合には、運転者がパーキングスイッチを操作しなくても、テレビ映像が表示されるようにすることである。
【解決手段】車両の走行速度が停止状態にあるとみなし得る設定速度以下であり、テレビスイッチがON状態にある場合には(S11,12の判定がYES)、パーキングスイッチが操作されていなくても、パーキングブレーキが作動させられ(S13〜16)、パーキングスイッチがON状態にあることを表す情報がディスプレイを制御するコンピュータに出力される(S17)。その結果、車両が停止状態にあり、かつ、テレビスイッチがON状態にある場合には、運転者がパーキングスイッチを操作しなくても、テレビ映像を見ることが可能となる。
(もっと読む)
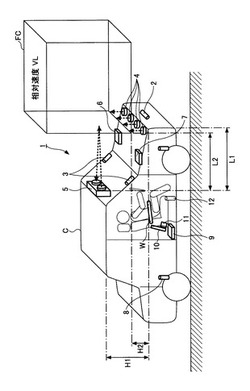
プリクラッシュシステム
【課題】本発明は、想定される衝撃に対して効果的に備えることができるプリクラッシュシステムを提供する。
【解決手段】プリクラッシュシステム10は、自動車20に衝撃が入力される可能性がある状況のとき運転者Hが行う耐ショック姿勢に起因して自動車に作用する荷重を検出する耐ショック姿勢検出用センサ11〜14と、耐ショック姿勢検出用センサ11〜14によって検出された検出値に基づいて運転者Hが耐ショック姿勢であるか否かの判断をするとともに、乗員が耐ショック姿勢であると判断すると自動車20に搭載された安全装置24,25を作動させるコントローラ15と、を備える。
(もっと読む)
車両走行制御装置及び車両走行システム
【課題】周囲の車両との関係を検知して安全性を確保しつつ、車間距離を短縮して車両走行を行える車両走行制御装置及び車両走行システムを提供すること。
【解決手段】車両A2の周囲における操舵による衝突回避スペースR1があるか否かを検出し、操舵による衝突回避スペースR1が所定以上である場合に先行車両A1との車間距離D1を基準車間距離より短くなるように走行制御を行う。これにより、周囲を走行する他車両と隊列を組んで走行する際に、先行車両A2との衝突を回避しつつ、車間距離D1を短くして車両走行が行える。このため、隊列を組む車群内への他車の割り込みを抑制することができ、走行の安全性が確保できる。
(もっと読む)
電動パーキングブレーキ装置
【課題】後面衝突時に電動アクチュエータから他の部品を保護しかつ制動力を維持可能な電動パーキングブレーキを提供する。
【解決手段】車両の後輪に設けられたパーキングブレーキ10と、パーキングブレーキ10を駆動して制動力を発生させる電動アクチュエータ20と、可撓性を有し、電動アクチュエータ20の前部とパーキングブレーキ10とにわたして設けられ、電動アクチュエータ20が発生する駆動力をパーキングブレーキ10に伝達する駆動力伝達ケーブル21とを備える電動パーキングブレーキ装置において、電動アクチュエータ20は、後輪の車軸よりに後方側に配置され、車体に対して前進する方向の相対変位に応じて、その少なくとも後端部が車体から脱落可能に支持される構成とする。
(もっと読む)
車両制御装置、方法及びコンピュータ読み取り可能な記録媒体
【課題】車両制御にあたり利便性を向上させることが可能な車両制御装置、方法及びその方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】車両制御装置1は、自車両が走行車線を逸脱しようとしていると判断した場合、自車両の方向及び速度の少なくとも一方を制御して、自車両の走行車線外で自車両が走行可能な領域に自車両を停止させる。このため、例えば運転者自らが路肩に進入しようとしている場合などには、自車両が車線に戻るように制御されることなく、路肩等に停止させられることとなる。従って、車両制御にあたり利便性を向上させることができる。
(もっと読む)
運転支援装置
【課題】運転者が走行環境に対して適切な運転操作を行っていない状況での安全性を向上させる運転支援装置を提供すること。
【解決手段】車両に搭載され、自車両と自車両前方物体との衝突可能性に応じて衝突回避又は衝突衝撃低減のための制御を実行する運転支援装置において、自車両が自車両進行方向前方の一時停止すべき一時停止地点において停止することが困難であると判定されたとき、警報を出力すると共に、上記衝突回避又は衝突衝撃低減のための制御の実行開始タイミングを通常時よりも早める。
(もっと読む)
自動車発進装置
【課題】トルクコンバーターや摩擦クラッチを置き換えるもの。自動車を停止状態からスムーズに発進させ通常の走行状態では100%の動力伝達を目的とする。
【解決手段】プラネタリギアの差動動作を利用しオルタネーターを反力装置として利用することで目的を達成する、ロックアップクラッチと反力スイッチと励磁電流を制御することで回転力伝達経路や反力動作を自由にコントロールすることで走行状況に合わせて最適な動作をさせることができる。
(もっと読む)
車線逸脱防止装置及び車両用前照灯制御装置
【課題】走行車線から自車両が逸脱する場合に、本来の走行車線に対する運転者の認識状態を向上させることができる。
【解決手段】車両は、走行車線に対する自車両の横変位X及びヨー角φに基づいて、走行車線に対する自車両の逸脱傾向を判定し(ステップS4)、その判定結果に基づいて、走行車線に対する自車両の逸脱を防止する逸脱防止制御を行い(ステップS6、ステップS8〜ステップS11)、その一方で、前記横変位X及びヨー角φに基づいて、前照灯の照射角度を制御する(ステップS7)。
(もっと読む)
車両の衝突回避制御装置
【課題】モデル予測制御により、衝突を回避できる最適なルートを走行するためのアクチュエータの最適操作量を得る。
【解決手段】衝突回避制御装置は、自車の走行状態に関するデータとターゲットと自車間の距離およびターゲットの相対速度に関するデータとを記憶するデータベース部(6)と、データベース部(6)に記憶されたデータに基づいてターゲットの未来位置を予測するターゲット未来予測部(2)と、データベース部(6)に記憶されたデータに基づいて自車の未来位置を予測する自車未来予測部(3)と、ターゲットおよび自車の未来予測部出力に基づいて衝突の危険度を評価する衝突危険度評価部(4)と、衝突危険度評価部出力に基づいてモデル予測制御を行い、衝突回避のための自車のアクチュエータに関する最適操作量を検索する最適操作量検索部(5)を備える。
(もっと読む)
シートベルト装置
【課題】旋回制御措置の作動時にプリテンショナ機構を作動させるシートベルト装置において、プリテンショナ機構を頻繁に作動させて乗員に違和感を与えることを防止する。
【解決手段】ウエビング2aに所定の第1張力を付与する第1プリテンショナ機構2cと、第1プリテンショナ機構2cを作動させるプリテンショナコントローラ9とを備えたシートベルト装置2であって、車両Vの旋回時にその走行状態を安定させるために少なくともブレーキ装置3のブレーキ力を制御して車両の走行状態を制御するDSCコントローラ7と、DSCコントローラ7が作動を開始したときにそのDSC作動時間を計時するDSC作動時間計測部92とをさらに備え、プリテンショナコントローラ9は、DSCコントローラ7の作動後、DSC作動時間計測部92により計時されたDSC作動時間が所定時間を経過したときに第1プリテンショナ機構2cを作動させる。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、曲率半径推定部11aにより推定された、自車両の進行路の曲率半径を入力しかつ該曲率半径に基づいて、検知した障害物の所定時間後の位置を推定するとともに、その推定された曲率半径が、予め設定された所定曲率半径よりも小さいときには、該所定曲率半径に基づいて上記障害物の上記所定時間後の位置を推定する場合に、障害物の所定時間後の位置を正確に推定できるようにする。
【解決手段】上記所定曲率半径を、自車両の最小回転半径と略同じ値(特に5mが好ましい)に設定する。
(もっと読む)
車両制御装置
【課題】運転者が誤操作を行った場合に、運転者が本来意図していた車両挙動に早期に復帰させることのできる車両制御装置を提供する。
【解決手段】車両制御装置100は、運転者が車両の制動力または駆動力を操作するための操作手段10と、操作手段10の出力値に応じて車両の制動力、駆動力を発生させるブレーキ制御手段54およびエンジン制御手段50と、運転者による前記操作手段の操作状態を監視するストロークセンサ34と、ストロークセンサ34により取得された情報をもとに、運転者による操作手段10の操作が誤操作か否かを判断する誤操作判断手段62と、誤操作判断手段62によって操作が誤操作であると判断された場合に、操作手段10の出力値を補正した上でエンジン制御手段50およびブレーキ制御手段54に入力する補正手段64と、を備える。
(もっと読む)
走行支援システム
【課題】現在の走行支援システムは状況により、ドライバにとって最適な制御になっていない場合があり、たとえば圧雪路面でのABSのように危険を伴う制御となる場合もある。
【解決手段】車両の走行を支援手段により支援するものであって、乗員により天候状態が入力される複数の天候状態入力手段と、天候状態を検出する天候状態検出センサと、前記天候状態入力手段への入力結果、もしくは前記天候状態検出センサの出力結果のいずれかに基づき支援モードを決定するモード決定手段と、前記乗員により入力操作される悪天候モード入力手段と、を備え、前記モード決定手段は、前記悪天候モード入力手段への入力の存在時には前記天候状態検出センサの出力に基づき支援モードの決定を行い、前記悪天候モード入力手段への非入力状態では、前記天候状態入力手段の入力結果に基づき支援モードの決定を行い、前記支援モードに基づき前記支援手段が支援を実施する。
(もっと読む)
1 - 20 / 26
[ Back to top ]