
Fターム[3D046HH26]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903) | 車体前後方向 (371)
Fターム[3D046HH26]に分類される特許
61 - 80 / 371
ホイールベース長設定装置
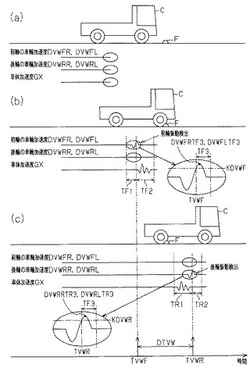
【課題】搭載される車両の実際のホイールベース長の差異に起因した車両性能のばらつきを抑制できると共に、搭載される車両の実際のホイールベース長に対応可能に構成することによるコスト増大を抑制できるホイールベース長設定装置を提供する。
【解決手段】ホイールベース長設定装置のECUは、車両Cの前輪が路面上の異物Fを踏んだ場合には、そのときの前側検出時間TVWF及び前側検出時車体速度を検出する。また、ECUは、車両Cの後輪が路面上の異物Fを踏んだ場合には、そのときの後側検出時間TVWR及び後側検出時車体速度を検出する。そして、ECUは、前側検出時間TVWF及び前側検出時車体速度と、後側検出時間TVWR及び後側検出時車体速度とから算出用ホイールベース長を算出し、該算出用ホイールベース長に基づきホイールベース長を設定する。
(もっと読む)
アンチスキッド制御用モータの制御装置

【課題】ABS制御用モータの制御装置において、モータの目標回転速度(ポンプの目標吐出流量に相当)を安定して適切な値に設定すること。
【解決手段】この装置では、リザーバ内のブレーキ液を汲み上げる液圧ポンプの目標吐出流量qreは、ABS制御中における車体減速度とABS制御の基準制御パターン(基準スキッド間隔Tskidbase、基準リザーバ液増大量Qupbaseを含む)との関係に基づいて作製されたテーブルMapqreqを利用して、車体減速度DVsoに対応するABS制御の基準制御パターンに対して最適な値に原則的に決定される。一方、1制御サイクルの継続時間であるスキッド間隔Tskidが基準スキッド間隔Tskidbaseよりも短い場合、或いは、減圧制御中におけるリザーバ液量の増大量であるリザーバ液増大量Qupが基準リザーバ液増大量Qupbaseよりも大きい場合、目標吐出流量qreがより大きい値に補正される。
(もっと読む)
車両の運転支援制御装置および方法
【課題】カメラ等を用いた前方認識装置2の出力情報に基く運転支援を、前方の道路形状により見通しが悪くても、安全に実行できる車両の運転支援装置を実現すること。
【解決手段】ナビゲーション装置1と、車両周辺の状況を撮影し特定の対象物までの距離と相対速度を算出できるカメラ等を用いた前方認識装置2と、車両走行状態を取得する車両に搭載されているセンサ群とを備え、前記ナビ装置1または前記カメラ等を用いた前方認識装置2から得られた走行環境情報によって、前記カメラ等を用いた前方認識装置の出力情報を基にした運転支援制御を継続するか中断するかを判定する。もし、それらセンサ群の情報により視認性が悪いと判断した場合は前記前方認識装置の出力情報を基にした運転支援制御を中断する。
(もっと読む)
車両の想定視線角度制御装置
【課題】 車両の減速時にドライバに自然な減速感を与えることができる車両の想定視線角度制御装置を提供する。
【解決手段】 サスペンション制御量設定部12は、制動状態演算部11から出力される減速度Gに基づいて、目標ピッチ角Apを求める。このとき、車両M1の車速に応じて、減速度を補正し、車速が大きいほど目標ピッチ角Apが後傾側となるようにする。また、目標ピッチ角Apを補正するとともに、ブレーキペダルの操作量に対する減速度Gも補正する。減速度Gの補正では、車速が大きいほど、ブレーキペダルの操作量に対する減速度Gが大きくなるようにする。
(もっと読む)
制動制御装置
【課題】 操舵制御装置で用いられる2つ以上の操舵角センサ値のうち、1つを制動制御装置から供給を受けることによって操舵角センサ数の低減を図った場合であっても、操舵角センサ異常の誤検出を回避した制動制御装置を提供する。
【解決手段】 操舵角、車輪速、および他の車両情報に基づき各輪の制動力を演算し、演算された前記制動力に基づいて前記各輪のホイルシリンダ圧を制御する制動制御装置において、前記制動制御装置は車両共有ネットワークと接続し、前記制動制御装置は、前記車輪速および前記他の車両情報に基づき前記操舵角の中立補正を行い、この中立補正後の操舵角に基づき前記各輪の制動力を演算するとともに、前記中立補正前の操舵角を、前記車両共有ネットワークに送信することとした。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御の終了後の車両姿勢のばらつきを抑制する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の開始を検出した場合(ステップS21)、その時点の車両状態及び走行環境のうちの少なくとも一方を検出し(ステップS22)、検出した車両状態及び走行環境のうちの少なくとも一方に基づいて、車両が走行車線に戻る際の車線逸脱防止制御の終了タイミングを補正する(ステップS24)。
(もっと読む)
車線逸脱防止装置
【課題】運転者の意思に適合させた車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、車両の旋回方向と、旋回路の旋回方向との一致及び不一致を判定するとともに(ステップS3)、旋回路の外側及び内側のうちのどれに対して車両が逸脱傾向を示しているのかを判定し(ステップS4)、それら判定結果に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS5)。
(もっと読む)
アンチスキッド制御装置
【課題】 路面上の突起または凹部乗り越え時等、後輪アンチスキッド制御が不要な場合、後輪の制動力不足を解消したアンチスキッド制御装置を提供する。
【解決手段】 ホイルシリンダの液圧を減圧および増圧可能な液圧制御弁と、減圧時にホイルシリンダから排出したブレーキ液を貯留するリザーバと、前記リザーバに貯留されたブレーキ液をマスタシリンダに戻すポンプと、車輪のロックを回避するように前記ホイルシリンダの液圧を減圧するアンチスキッド制御手段とを備えたアンチスキッド制御装置において、前記アンチスキッド制御手段は、後輪ホイルシリンダ圧の減圧が不要と判断した場合、前記後輪ホイルシリンダ圧の増圧量の抑制を低減、または減圧量の低減を行うこととした。
(もっと読む)
車両用保護システム
【課題】本発明は、車両用保護システムに係り、車速情報を用いた保護デバイスの作動要否の誤判定を防止することにある。
【解決手段】車両のVSC制御に用いられる各車輪の車輪速による車体速情報を用いて、車両と衝突した歩行者を保護するためのエアバッグの展開要否を判定する車両用保護システムにおいて、VSC制御に用いられる各車輪の車輪速による車体速情報がVSC制御の作動中に得られるか否かを判別する(ステップ100)。そして、VSC制御に用いられる各車輪の車輪速による車体速情報がVSC制御の作動中に得られたと判別される場合に、上記の歩行者保護エアバッグの展開要否を判定するのに用いる車体速情報を、そのVSC制御に用いられる各車輪の車輪速による車体速情報に代えて所定のフェールセーフ値とする(ステップ104)。
(もっと読む)
制動力制御装置
【課題】運転者の意図しない制動力の増加による違和感を緩和できる制動力制御装置を提供する。
【解決手段】マスタシリンダ2と2つの遮断弁6−1,6−2を介して2制動系統のホイルシリンダ3FR〜3RRが接続され、遮断弁6−1,6−2が閉状態では、マスタシリンダ圧と踏み込みストローク量に基づき目標減速度Gを演算する。1つの遮断弁だけが開状態となると、目標減速度Gの急上昇を制限するように、マスタシリンダ圧の変動を小さく制限する。
(もっと読む)
車両運動制御装置
【課題】車両に対する障害物を事前に判断し、様々な走行情報を加味して回避走行全般に亘り、ドライバの操作、意志を的確に反映して自然に各車両挙動の制御装置が適切に動作し、障害物の回避走行を適切に行う。
【解決手段】路面摩擦係数、路面勾配の路面情報、自車両と障害物の相対的な運動を考慮し自車両が制動操作のみで障害物を回避できるか判定し、自車両の障害物に対する回避操作の状態を判定する。そして、自車両の制動操作のみで障害物を回避できない場合で且つ自車両の障害物に対する回避操作が行われている際、ハンドル操作と車両挙動に応じ回避走行モードに移行する。回避走行モード中はハンドル操作と車両挙動の変化に応じ必要な制御を車両挙動制御部に実行させ、回避走行モードの解除はドライバのハンドル操作による回避走行終了を検出し、或いは、障害物回避後の車両挙動の安定を検出し行う。
(もっと読む)
車両用制動制御装置及び車両制動制御方法
【課題】制動力のみによって障害物を回避することが困難な場合に、制動力を低下させてステアリング操作を行った場合に、当該障害物を回避することが可能と判断するときの判断精度を向上させる。
【解決手段】制動力のみによって障害物を回避することが困難なときに、制動力を低下させて運転者のステアリング操作によって回避することが可能か否かを判断し、可能と判断されたときに制動力を低下させる。
(もっと読む)
自動変速機のレンジ切換制御装置
【課題】 従来よりもさらに、後方から追突された場合の移動距離を短くすることができる自動変速機のレンジ切換制御装置を提供すること。
【解決手段】 セレクト操作入力部1と、アクチュエータ3と、位置センサ33と、制御器2と、を備える自動変速機のレンジ切換制御装置において、車両後部からの衝突を検出する後部衝突センサ6を設け、制御器2は、車両後部からの衝突を検出した場合に、レンジ位置がPレンジ位置ならば、レンジ位置をNレンジ位置へ切り換えた。
(もっと読む)
車輌用運転支援装置
【課題】操作者の操作によらず車輌の走行状態を自動制御する車輌において、一時停止や徐行のための運転支援を行う車輌用運転支援装置を提供すること。
【解決手段】操作者の操作によらず車輌の走行状態を自動制御する車輌用運転支援装置100は、一時停止地点または徐行区間開始地点と自車との間の距離を取得する距離取得手段63と、自車の走行状態を検知する走行状態検知手段64と、距離取得手段63により取得した距離が所定値となり、かつ、走行状態検知手段64が減速状態を検知しない場合に、一時停止または徐行のための運転支援を行う運転支援手段65と、を備える。また、運転支援手段65は、距離取得手段63により取得した距離が所定値となり、かつ、走行状態検知手段64が、自動制御による減速状態を検知しない場合にも、一時停止または徐行のための運転支援を行う。
(もっと読む)
車両の減速制御装置
【課題】 警報制動が必要であり乗員が警報制動を認識できる状況に於いては確実に警報制動を行うと共に、警報制動が必要であるが乗員が警報制動を有効に認識できない状況に於いては警報制動に起因して乗員が違和感を覚えることを防止する。
【解決手段】 車輌の前方に障害物があり(410)且つ運転者により制動操作が行われておらず(415)且つ運転者がわき見をしており(420)、車輌が障害物に衝突する虞れがある状況に於いて(460)、警報制動の最大目標減速度Gbt2maxを演算し、自動走行制御が行われていないとき(510)及び自動走行制御が行われその目標減速度Gbt4が最大目標減速度Gbt2maxよりも小さい基準値Gbt4s未満であるとき(515)には警報制動を行うが(520〜565)、自動走行制御の目標減速度Gbt4が警報制動の許可基準値Gbt4sよりも大きいとき(515)には、警報制動を行わない。
(もっと読む)
車両用制動力制御装置および車両用制動力制御方法
【課題】車両の姿勢変化が極力小さい状態で障害物を回避し、障害物回避後に他の障害物の回避が行いやすい制動力制御を行う。
【解決手段】障害物検出部110で検出した障害物の位置と自車両走行状態検出部120により検出された自車両の走行状態とに基づいて、制動力制御実施判定部131により制動力制御の必要性が判定される。制動力制御が必要である場合は、自車両の走行状態に基づいて予測走行軌跡算出部132により算出された予測走行軌跡と障害物の位置とから障害物回避判定部133により障害物回避判定が行われる。障害物回避ができないと判定された場合は、制動力指令値算出部134により制動力指令値が算出され、制動力指令値により制動力発生部140が制御される。
(もっと読む)
回避制御装置、この回避制御装置を備える車両および回避制御方法
【課題】自車両に障害物を確実に回避させることができる回避制御装置を提供する。
【解決手段】本発明の回避制御装置10は、車両11よりも前方の道路14上に存在する障害物15の障害物情報を検出する障害物検出手段と、車両11の走行状態を検出する自車情報検出手段と、車両11の制動力を制御可能な制動力制御手段34と、障害物検出手段により検出された障害物情報に基づいて障害物15の移動予測状態を推定しその状態での障害物15が検出時から所定の時間後までに到達し得る最大領域を推定到達領域Aとして算出する障害物到達領域推定手段36と、車両11が推定到達領域Aを回避可能な回避実行経路を設定する回避経路設定手段30とを備え、制動力制御手段34は、設定された回避実行経路を実行させるべく制動機構を制御する。
(もっと読む)
電動パーキングブレーキ用制御装置
【課題】 車両が停止してから直ぐに自動引きを行なうようにし、応答遅れを無くして商品性の向上を図ること。また、坂道の場合で、走行から停車時にパーキングブレーキを自動引きしてドライバーの負担を軽くすること。
【解決手段】 アクセルペダルが解除され、ブレーキペダルが踏まれる前の車両の減速度Ggを検出し、この検出値から路面の勾配を判定する。記憶部38のテーブルから予め設定しておいた目標荷重を取り込み、停車が確定してから電動モータ16を正転駆動する。そして、電動モータ16を目標荷重まで作動させて時刻t1で電動モータ16を停止させる。
(もっと読む)
制動制御装置
【課題】先行車追従制御によって自動停車する際の液圧式ブレーキの負担を軽減した制動制御装置を提供する。
【解決手段】制動制御装置を、先行車の走行状態に応じて液圧式ブレーキ70を制御し、車両を自動停止させる追従走行制御部91と、追従走行制御部91による車両の自動停止を、車両の停止前に検出する自動停車検出部41aと、自動停車検出部41aによる自動停止の検出に応じて、電動アクチュエータ20による機械式ブレーキ10の解除状態から制動状態への駆動を、車両の停止前に開始させる機械式ブレーキ制御部40とを備える構成とする。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御をABSの制動力調整機能を転用して行う。このときに、加速度センサを用いた減速度検出を行い、遅延のない自動制動制御を実現する。
(もっと読む)
61 - 80 / 371
[ Back to top ]