
Fターム[3D046HH26]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903) | 車体前後方向 (371)
Fターム[3D046HH26]に分類される特許
21 - 40 / 371
制駆動力制御装置
【課題】制動力発生装置に経年変化や異常が生じても各車輪に適切な制動トルクを発生させること。
【解決手段】車輌の目標制動力と実際の車輌の制動力との差が所定値を超えたときに油圧制動トルク発生装置(ブレーキアクチュエータ23等)又はモータ31FL,31FR,31RL,31RRに異常ありと判定する制動装置異常判定手段41iを設け、この制動装置異常判定手段41iが異常ありと判定した際に、車輌の目標制動力と実際の車輌の制動力とを一致させるように設定された各車輪10FL,10FR,10RL,10RRの内の少なくとも一輪と残りの車輪の夫々の全制動トルク間の相対関係に基づいて要求機械制動トルク又は要求モータトルクを補正するよう要求油圧制動トルク設定手段41f又は要求モータトルク設定手段41gを構成すること。
(もっと読む)
電動パーキングブレーキ制御装置

【課題】電動パーキングブレーキの構成要素の耐久性を高める必要を廃することができる電動パーキングブレーキ制御装置を提供すること。
【解決手段】本発明による電動パーキングブレーキ制御装置1は、車両のドラムブレーキ7の作動力を制御する作動力制御手段2aと、ドラムブレーキ7の制動力不足を検出する制動力不足検出手段2bと、制動力不足検出手段2bが制動力不足を検出した場合に、制動力不足検出手段2bが制動力不足を検出しなくなるまで作動力を増加させる作動力増加手段2cと、車両の位置を検出する位置検出手段9aと、作動力増加手段2cが作動力を増加させた場合に、作動力の増加分と位置検出手段9aの検出した車両の位置を記憶する記憶手段9bを備えると共に、記憶された車両の位置において再度車両を停止させる場合に、作動力増加手段2cが記憶された作動力の増加分だけ一度に作動力を増加させることを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知手段(レーダ装置)により検知した障害物について該検知から所定時間経過後における自車両Wに対する相対位置を予測する場合に、該相対位置を正確に予測できるようにする。
【解決手段】移動物体(先行車両Q)について該移動物体の検知から所定時間経過後における自車両Wに対する相対位置を予測する際、該移動物体の近傍に位置する静止物体について検出された複数(A点、B点及びC点)の相対位置に基づいて、該移動物体の移動方向を推定し、該推定された移動方向(A点、B点及びC点から求まる円の中心Pに向かう方向と垂直な方向E)と、該移動物体について検出された相対位置及び相対速度ベクトルの大きさとに基づいて、該移動物体について上記所定時間経過後の相対位置を予測する。
(もっと読む)
車両の制御装置
【課題】ブレーキホールド制御実施中にニュートラル制御を実施している状況から、発進要求に応じてニュートラル制御からの復帰を行うときに、そのニュートラル制御の復帰時のショックを抑制する。
【解決手段】ニュートラル制御からの復帰時に、運転者のアクセルペダル踏み込み量に関係なく、スロットルバルブを、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに開いて、エンジントルクの早期上昇を抑制する(ステップST4)。また、ブレーキ圧についても、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに解放する(ステップST5〜ST8)。このようにして、ニュートラル制御からの復帰時の環境(スロットル開度、ブレーキ力)を、前進クラッチの係合を考慮して適正に設定することで、ニュートラル制御からの復帰時のショックを抑制することができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者が速度順応現象に陥ったときに車両の安全を確保する。
【解決手段】走行情報取得部22は、車両走行情報を取得して蓄積する。判定部24は、車両走行情報の履歴に基づいて、高速走行により車両の運転者の速度感覚に影響を及ぼしうる時間として予め定められた所定時間にわたり高速走行が継続している速度順応条件が成立するか否かを判定する。制御量変更部26は、判定部24により速度順応条件が成立すると判定されたとき、運転者によるブレーキ操作量にしたがって設定される目標減速度を通常走行時より増加させる。ブレーキ制御部28は、目標減速度を参照して車両に制動力を発生させる。
(もっと読む)
ディスクブレーキ装置
【課題】車両の前進制動時は勿論のこと、後退制動時にもクロンク打音を確実に抑制することができるディスクブレーキ装置を提供する。
【解決手段】車両の前進制動の操作に伴いブレーキパッド6の裏金6Aがトルクメンバ3の第1トルク受部3C側に移動すると、ばね片9Aの先端部が係合突部6Eの一方の斜面に係合して裏金6Aを第1トルク受部3C側に弾性的に押圧するため、ディスクブレーキ装置は第1当接状態に保持される。また、車両の後退制動の操作に伴い裏金6Aがトルクメンバ3の第2トルク受部3D側に移動すると、ばね片9Aの先端部が係合突部6Eの他方の斜面に係合して裏金6Aを第2トルク受部3D側に弾性的に押圧するため、ディスクブレーキ装置は第2当接状態に切り換えて保持される。その結果、車両の前進制動時は勿論のこと、車両の後退制動時にもクロンク打音が確実に抑制される。
(もっと読む)
車両の運動制御装置
【課題】左右転舵時の走行性の走行感度向上と安定性向上御を両立させる車両の運動制御装置を提供する。
【解決手段】車体スリップ角算出部35で車体スリップ角βを、規範スリップ角算出部36aで規範スリップ角βmを算出する。車体スリップ角に対して規範スリップ角βmにもとづいてフィードフォワード制御が行なわれ、規範スリップ角βmと車体スリップ角βとの偏差にもとづいて、フィードバック制御が行なわれ、転舵角補正量δcとして加算部40bに入力され、目標転舵角δtが補正される。規範ヨーレート算出部37aで規範ヨーレートγmが算出される。また、ヨーレートに対して、規範ヨーレートγmにもとづいてフィードフォワード制御が行なわれ、規範ヨーレートγmとヨーレートγとの偏差にもとづいて、ヨフィードバック制御が行なわれ、ヨーモーメントMZとしてDYC制御部37kに入力される。DYC制御部37kは、駆動力配分量を決定する。
(もっと読む)
車両挙動制御装置
【課題】回転半径短縮制御が作動した場合でも最適なトラクション制御を行うことができる車両挙動制御装置を提供することを課題とする。
【解決手段】車両の旋回性能を向上させるために左右輪の駆動力差により旋回制御(回転半径短縮制御)を行う第1駆動力制御手段と、左右輪の駆動力差が異なる場合に駆動力差を減少させるトラクション制御を行う第2駆動力制御手段とを備える車両挙動制御装置において、第1駆動力制御手段による旋回制御がされるときは第2駆動力制御手段によるトラクション制御を抑制することを特徴とする。
(もっと読む)
ブレーキ制御方法およびブレーキ制御装置
【課題】車輪への制動力を制御する際に、高周波成分を抽出するなどの周波数分析をすることなく制御できるブレーキ制御方法およびブレーキ制御装置を提供する。
【解決手段】本発明のブレーキ制御装置は、タイヤが装着されている車輪に設けられ、この車輪に制動力を付加して制動させるとともに、この制動力を調整する機能を有するブレーキと、タイヤにかかるタイヤの半径方向の加速度信号を時系列的に検出する加速度センサと、加速度信号が入力され、加速度信号に対して所定の検知範囲を設定し、検知範囲における加速度に対して閾値を設定する検知範囲設定部を備え、検知範囲における加速度を検出し、検出された加速度と閾値とを比較し、加速度が閾値よりも大きい場合、ブレーキに制動力を調整させる制御信号を出力する制御部とを有する。
(もっと読む)
車両用運転支援システム
【課題】 同乗者の乗り心地を向上させる。
【解決手段】 車両の加速度が加速度判定値未満になるようにスロットルバルブの開度及び制動装置等を制御する。これにより、車両が発信した際に車両の乗員に対して必要以上の慣性力が作用しないので、同乗者の乗り心地を向上させることができる。
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ点補正の誤差に起因した不適切な挙動制御を防止する車両挙動制御装置を提供する。
【解決手段】本発明の車両挙動制御装置Cでは、挙動制御の開始しきい値Thを設定するにあたって、停止中ゼロ点補正出力YR0Sと走行中ゼロ点補正出力YR0Mとの差が第1の所定値Aを超え、且つ、所定時間Tht内における停止中ゼロ点補正出力YR0Sの演算回数と走行中ゼロ点補正出力YR0Mの演算回数との差が第2の所定値Thctを超える場合に、挙動制御の開始しきい値Thを高く設定する。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、車両を起動し最初の走行開始以降であって最初のブレーキ操作時より前に回転部材の付着物を確実に除去することにより、付着物に起因した制動力の低下や振動及び鳴きの発生を防止する。
【解決手段】車両の制動制御装置は、判定手段(ステップ102)が、自動制動手段が電気的に起動状態になった後に、回転部材の付着物の有無を判定し、第1制動制御手段(ステップ212,216〜220)が、判定手段(ステップ102)が回転部材に付着物が有ると判定した場合、自動制動手段が電気的に起動された後の車両Mの最初の走行開始から所定時間T1経過の間に、自動制動手段に対して制御指令を出力し、所定量の制動力を発生させる。これにより、摩擦部材が回転部材に押し付けられる。
(もっと読む)
車両の制御装置
【課題】「或る制御手段による制御対象の基本制御」と「他の制御手段による基本制御を修正する修正制御」との制御干渉を抑制すること。
【解決手段】この装置は、車両の制御対象の基本制御量を決定するための演算を行う1つ又は複数の第1制御部A11〜A1iを有し前記第1制御部の演算結果に基づいて前記基本制御量を決定する第1制御手段A1を備えた第1制御ユニットU1と、前記基本制御量の修正に使用される前記制御対象の修正制御量を決定するための演算を行う1つ又は複数の第2制御部A21〜A2jを有し前記第2制御部の演算結果に基づいて前記修正制御量を決定する第2制御手段A2を備えた前記第1制御ユニットとは独立した第2制御ユニットU2とを備える。前記基本制御量に基づく基本制御と前記修正制御量に基づく修正制御とが制御干渉し得る場合、前記第1制御部の全て又は一部の制御機能を停止する。
(もっと読む)
駐車ブレーキ制御装置
【課題】車両の停止状態を維持させる場合において、電動パーキング装置の使用頻度を低下させることができる駐車ブレーキ制御装置を提供する。
【解決手段】メインECUは、駐車スイッチが操作された場合において、車両の車体速度VSが「0(零)」であると共に、パーキングロック装置により自動変速機の出力軸がパーキングロックされているときには、車両の停止状態が良好に維持されていると判断する。そのため、メインECUは、電動パーキング装置を非駆動状態にする。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】低速度で走行中の車両の車輪に制動力を付与する場合に、制動力付与機構のポンプから発生する駆動音を低下させることができる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】車両は、各車輪に制動力を個別に付与するための制動力付与機構と該制動力付与機構の駆動を制御するECUとを備え、制動力付与機構は、車輪毎に対応するホイールシリンダ内のブレーキ液圧を上昇させる場合に駆動するポンプを備える。ECUは、ステアリングホイールの操舵角Aを検出し、該検出した操舵角Aが操舵角閾値KA以上である場合に、車両の旋回方向内側の後輪(例えば右後輪)に対して制動力を付与させるために、該後輪(例えば右後輪)に対応するホイールシリンダ内のブレーキ液圧BPを上昇させるべくポンプを駆動させる。そして、ECUは、ポンプの駆動が開始してから第1駆動時間閾値KT1経過した場合に、ポンプの駆動を停止させる。
(もっと読む)
ブレーキ液圧制御装置の負圧発生防止装置。
【課題】 電子制御ユニット基板を収納する基板室などの呼吸作用を、ワイヤハーネスに設けられてコネクタの室内に開口する呼吸チューブによって行わせる負圧発生防止装置にして、コネクタの室内に水を吸い込んだ場合にも、ブレーキ液圧制御装置に悪影響を与えない負圧発生防止装置を提供する。
【解決手段】 基板室(15)に収納された電子制御ユニット基板(16)にコネクタを介して接続されるワイヤハーネス(35)に呼吸チューブ(37)が設けられ、該呼吸チューブの一端が、互いに結合されたユニット側コネクタ(33)と車両側コネクタ(36)との間に形成されるコネクタ室(38)に開口し、他端が水の掛からない場所に開口し、呼吸チューブのコネクタ室への開口位置(49)と、コネクタ室と基板室とを連通する連通穴(48)のコネクタ室への開口位置(50)とがオフセットされている。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】停止状態にある車両に旋回時制動制御が実行されている場合において、車両の発進時に該車両の運転手に与える不快感を低減させることができる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、ステアリングホイールの操舵角Aが操舵角閾値KA以上であると判定した場合、旋回時制動制御を実行させることにより、車両の旋回方向内側の後輪に対して制動力BPを付与させる。この状態で、車両の車体速度VSが予め設定された低下用車体速度閾値KVS2未満である場合、ECUは、車両の旋回方向内側の後輪に対する制動力BPを、車体速度VSが低下用車体速度閾値KVS2以上である場合に車両の旋回方向内側の後輪に対して付与される制動力よりも小さくする。
(もっと読む)
ベルト式無段変速機搭載車両の制御装置
【課題】車両の停止直前に油圧不足を防止することで変速比を十分にロー側へ戻す。
【解決手段】本発明は、ベルト式無段変速機搭載車両において、車両が停止する直前、セカンダリプーリへの供給圧を増大させることでベルト式無段変速機構の変速比を最もロー側へ移行させ、ロー戻し手段によってセカンダリプーリへの供給圧を増大させるとき、フォワードクラッチのクラッチ容量を低下させてフォワードクラッチを解放する(S21)。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】車両の走行中において車輪に制動力が付与された場合に、該制動力が付与される車輪側からの異音の発生を抑制できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】車両の制動制御装置のECUは、ステアリングホイールの操舵角Aの絶対値が操舵角閾値KA以上である場合に、車両の旋回方向内側の後輪(例えば右後輪)を制動用車輪に設定し、該制動用車輪に対して制動力を付与する旋回時制動制御を実行する。そして、ECUは、車両の車体速度VSが変動開始用車体速度閾値KVS2以下である場合に、制動用車輪(例えば右後輪)に対する制動力BPの大きさが予め設定された所定振幅で変動するように、制動力付与機構を制御する。
(もっと読む)
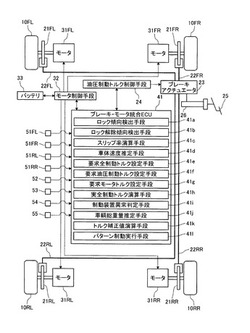
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
21 - 40 / 371
[ Back to top ]