
Fターム[3D048BB21]の内容
ブレーキシステム(ブースタ) (10,751) | 目的、効果 (1,739) | 正常状態における制動力の確保、向上 (102)
Fターム[3D048BB21]の下位に属するFターム
積載荷重に対する対応策 (2)
圧力源の確保 (15)
Fターム[3D048BB21]に分類される特許
41 - 60 / 85
電動パーキングブレーキシステム

【目的】新しい摩擦材についての摺合わせ制御が行われた後、自動で、摺合わせ制御が必要であるか否かが検出され、自動で、摺合わせ制御が行われるようにする。
【解決手段】動的パーキングブレーキが作動させられたか否か、イグニッションスイッチのON操作回数が設定回数に達したか否か、イグニッションスイッチのOFF状態が設定時間以上継続したか否かが検出される。これらのうちの少なくとも1つが満たされた場合には、効き変動条件が満たされたとされる。そして、効き変動条件が満たされ(S2)、かつ、パーキングスイッチ210のリリース指示操作が行われた場合(S1)には、押付力が摺合わせ制御に適した大きさまで小さくされて(S4)、摺合わせ制御が行われる。運転者が、スイッチ操作をしなくても、必要である場合に、摺合わせが行われるため、燃費が悪くなることを回避しつつ、効きの変動が生じることを回避することができる。
(もっと読む)
電動パーキングブレーキ装置

【課題】パーキングブレーキケーブルの経時変化に応じて適切な駆動制御を行う電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置を、車輪とともに回転する回転体Dと、回転体Dに加圧接触する摩擦部材131,141と、摩擦部材131,141を支持する支持部材120と、摩擦部材131,141を駆動する電動アクチュエータ20と、一方の端部を電動アクチュエータ20によって牽引されるパーキングブレーキケーブル21と、パーキングブレーキケーブル21の他方の端部から摩擦部材131,141に駆動力を伝達する駆動力伝達部材180と、パーキングブレーキケーブル21の張力に起因する駆動力伝達部材180の支持部材120に対する変位量を検出する張力センサ190と、張力センサ190の出力に応じて電動アクチュエータ20を制御する制御装置40とを備える構成とする。
(もっと読む)
ブレーキ液圧制御装置
【課題】 ソレノイドバルブの前後の差圧の変化が頻繁に生じる場合であっても、ソレノイドバルブの作動特性を検出することが可能であって、ブレーキ液圧の制御性を向上させることができるブレーキ液圧装置を提供すること。
【解決手段】 ホイールシリンダのブレーキ液圧を増減圧可能であって、コイルへの非通電時に開弁する常開のソレノイドバルブと、要求液圧に応じた通常デューティ比を演算し、前記通常デューティ比に基づいて前記コイルに電流を供給する制御手段と、前記ソレノイドバルブ全閉時は、前記通常デューティ比よりも高い2つの異なるデューティ比に基づいて前記コイルに電流を連続して供給する強制制御手段と、前記2つの異なるデューティ比に対応する2つの電流値を検出する電流値検出手段と、前記電流値検出手段により検出された2つの電流値に基づいて次回の通常デューティ比を補正する補正手段と、を備えた。
(もっと読む)
電動ブレーキ装置
【課題】電動モータの回転位置から押圧部材の推力を推定する電動ブレーキ装置においてキャリパ剛性が変化しても所望の制動力を発生し得る電動ブレーキ装置を提供する。
【解決手段】電動モータ15を備え、ディスクロータ11にブレーキパッド13,14を押圧する押圧部材24が電動モータ15により推進されるキャリパ16と、制動指示信号に応じて押圧部材24によるブレーキパッド13,14の押圧力指令値を算出し該押圧力指令値に基づいて電動モータ15を制御する制御手段32とからなり、制御手段32は、電動モータ15の回転位置から押圧部材24の推力を推定するとともに、押圧部材24がブレーキパッド13,14を押圧する頻度に応じてキャリパ16の剛性を推定し該剛性の推定結果に応じて制動指示信号により算出されるブレーキパッド13,14の押圧力指令値を変更するキャリパ剛性推定手段を有する。
(もっと読む)
ブレーキ制御システム
【課題】液圧回路に配置される電磁弁の過熱状態を防止するとともに、制御の安定性も確保できるブレーキ制御システムを提供する。
【解決手段】DAC制御中にホイールシリンダへの増圧要求があると、ホイールシリンダ圧がEPB作動判定値P0(通電限界判定値)に達するまではECBによる増圧制御が行われ、その制動力が高められる。そして、ホイールシリンダ圧がEPB作動判定値P0に達すると、それ以降の制動力についてはEPBにより補われる。つまり、電磁弁への通電電流値が通電電流限界値を超えないように制御される。一方、減圧制御においてはもともと通電電流値が小さいため、ECBによる液圧制御が行われる。
(もっと読む)
タンデム空気圧ブレーキブースター
【課題】 ブースターのスラストロッド(4)が最大ストローク位置でブロックしないようにする。
【解決手段】 ブロックは、第1プレートスカート(12)がタンデムブースターのシール(22)に密封状態で付着した後に起る。このシールは、真空を第1前チャンバ(5)内に閉じ込めてしまう。これが起らないようにするため、空気圧ピストン(3)に押し付けられるシールの第1リップ(23)を狭間を備えた城壁の形体に形成する。凸壁状部分により、プレートスカート(12)がシール(22)全体に亘って密封状態で付着することがないようにする。このように付着しないため、空気が第1前チャンバ(5)への漏れ、休止位置に戻すことができる。
(もっと読む)
電動パーキングブレーキシステム
【課題】張力センサのヒステリシス特性を考慮して、停止状態維持制御が適正に行われるようにする。
【解決手段】増し引き回数が設定回数より少ない場合には、張力センサのセンサ値Foutが読み込まれ、ヒステリシス幅ΔHが取得され、センサ値Foutからヒステリシス幅ΔHを引いた値が実張力Fcとされる(S101〜103)。実張力Fcが制御用目標張力Fref(n)より小さくなると増し引きが行われる(S113〜116)。その結果、増し引きが適切なタイミングで開始されるようにすることができ、張力を速やかに、車両を停止状態に保ち得る適正な大きさに制御することができる。
(もっと読む)
電動パーキングブレーキシステム
【課題】電動パーキングブレーキシステムにおいて、ケーブルの張力を、車両を良好に停止状態に保ち得る大きさに制御可能とする。
【解決手段】停止状態維持制御中において、プログラムが実行される毎に、傾斜角度、シフト位置に基づいて移動力対応目標張力Frefbが取得されて、最大値Fmaxと比較して小さい方が今回の暫定目標張力Fref(n)とされる(S107,108)。前回の制御用目標張力(本目標張力)Fref(n-1)*と今回の暫定目標値Fref(n)とが比較され、大きい方が今回の制御用目標張力Fref(n)*とされる(S110〜112)。今回の暫定目標張力Fref(n)の方が小さくても、今回の制御用目標値Fref(n)*が小さくされることがない。その結果、張力を、車両を良好に停止状態に保ち得る大きさに制御することができる。
(もっと読む)
電動パーキングブレーキシステム
【課題】電動パーキングブレーキ機構の作用中に、制動トルク不足が生じ難くする。
【解決手段】S33において、傾斜角度と、シフト位置とから移動力対応目標張力が決定され、S34において、傾斜角度と、シフト位置とから緩み補填量が取得され、S35において、これらの和である緩み対応目標張力と出力可能な最大値との小さい方が、制御用目標張力とされる。そして、S40〜43において、ケーブルの張力が制御用目標張力(たいての場合は、緩み対応目標張力となる)となるように電動モータが制御される。このように、パーキングブレーキの作動時に、張力がケーブルの緩みを考慮した大きさに制御されるため、その後、パーキングブレーキの作用中に、制動トルク不足が生じ難くすることができ、増し引きが行われ難くすることができる。
(もっと読む)
電動パーキングブレーキシステム
【課題】センサの温度および温度特性を考慮して、張力を車両を停止状態に保ち得る適正な大きさに制御し、消費電力の低減を図る。
【解決手段】前後加速度センサは、温度が標準温度Tαより高い場合は低い場合より、誤差の絶対値が小さくなる特性を有する。温度特性が考慮されない場合には、温度が高くても低くても、誤差の絶対値が最大値dであると想定して、前後加速度が求められ、傾斜角度が取得されるようにされていた。それに対して、温度および温度特性が考慮されれば、温度が標準温度Tαより高い場合には、誤差の絶対値がc(c<d)であると取得することができる。その結果、前後加速度センサによる検出値に基づいて、真の値に近い傾斜角度を取得することができる。目標値を、車両を停止状態に保ち得る適正な大きさで、かつ、より小さい値として取得することができ、消費電力の低減を図ることができる。
(もっと読む)
電動ブレーキ装置およびその制御方法
【課題】本発明は、電動ブレーキの制動力制御の精度を向上することを目的とする。
【解決手段】電動モータ1311が発生する回転トルクに基づきブレーキ摩擦体を押圧または離間させる力を発生する変換機構を備えた電動ブレーキ装置であって、電動モータ1311の回転状態や、ブレーキ摩擦体の押圧または離間の制動過程を回転状態取得部の回転情報から検出し、その検出値に基づいて、電動モータ1311の所定の回転状態となったことを検知し、電動モータ1311の電流値情報に基づいて押圧力指令と電動モータ回転変位値との関係を補正する。
(もっと読む)
電気機械式パーキングブレーキ及びその動作方法
【課題】検出したアクチュエータの消費電流のみに基づき、周囲温度に依存せず確実かつ正確にパーキングブレーキ力を調整できるよう改良した冒頭記載のパーキングブレーキ及びその動作方法を提供すること。
【解決手段】少なくとも1つの電気機械式のアクチュエータ15を備え、該アクチュエータの回転運動が操作ユニット2を介して直線運動に変換され、少なくとも1つのブレーキシュー3,4が、車輪に結合されたブレーキドラム5に対して、ブレーキシュー3,4に少なくとも1つ設けられたブレーキライニング10,11を所定の力で圧接するように摺動され、当該パーキングブレーキの作動時及び/又は解除時にアクチュエータ15の消費電流が検出されるパーキングブレーキにおいて、あらかじめ設定した所定のパーキングブレーキ力が検出されるようアクチュエータ15の消費電流を変更させる手段9を設けた。 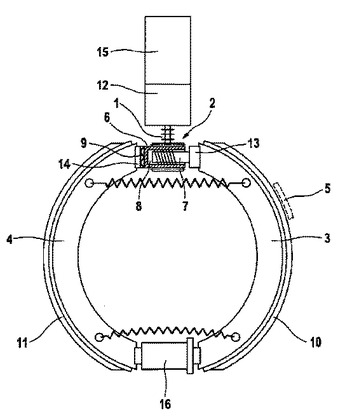 (もっと読む)
(もっと読む)
インホイールモータ車用のブレーキ装置
【課題】油圧ポンプの出力する油圧が低下した場合にも必要な制動力を発生することができるインホイールモータ車用のブレーキ装置の提供。
【解決手段】本発明は、車輪を回転駆動するモータ60をホイール内に備えるインホイールモータ車用のブレーキ装置において、モータの出力軸に接続され、モータの回転出力により作動する油圧ポンプ90と、車輪に作用する摩擦部材52と、油圧シリンダ55と、前記油圧シリンダ内に設けられるピストン51と、前記ピストンを摩擦部材に向けて付勢する付勢手段812とを含み、前記摩擦部材に対するピストンの押圧力により車輪に制動力を付与する油圧ブレーキ機構800と、前記油圧シリンダに油圧ポンプを連通し、前記油圧シリンダに、前記付勢手段による付勢力に対抗して前記ピストンを付勢する油圧を導通させる油圧回路300と、前記油圧シリンダ内に導かれる油圧を制御して、前記摩擦部材に対するピストンの押圧力を変化させる油圧制御手段(410等)とを備えることを特徴とする。
(もっと読む)
電気的に駆動される車両の制動のための方法
電気的に駆動される車両、特にレール車両の制動のための方法に関する。制動システムの特性を直接にシステム状態に依存せずに最適に形成し、すなわち、例えば車両積載状態、電動機および特に磁石の温度ならびに冗長性要求のような車両の運転状態に応じて最適に形成し、それにより今日車両で必要不可欠であった機械的ブレーキの省略を達成することにある。バネ付勢に基づく摩擦ブレーキを装備していて、車両駆動が永久励磁同期機によって行なわれ、同期機の端子がスイッチを介して制動トルク発生装置に接続されている電気的に駆動される車両の制動のための方法において、車両の運転状態および要求される制動値に依存して、存在する電動機の制動およびバネ付勢に基づく摩擦ブレーキを個別にかつ順々に投入する制御を行う。 (もっと読む)
車両のパーキング制御システム
【課題】車両のパーキング制御システムにおいて、自動変速機の変速レンジを駐車レンジに変更する際に、パーキングブレーキに十分な制動力を早期かつ確実に付与しながら、パーキングブレーキのかけ忘れを確実に防止する。
【解決手段】車両のパーキング制御システムは、操作者の操作によって操作されるシフトレバー61と連動して自動変速機20の変速レンジを切り替えるとともに自動変速機20に備えられているパーキング機構27を係合状態と係合解除状態に切り替えるレンジ切り替え装置26と、自動変速機20の変速レンジに対応する電気的なレンジ位置信号に基づいて駆動されて、車両のパーキングブレーキ53を制動状態と制動解除状態に切り替える電動パーキングブレーキ装置50と、車両のレンジ位置信号に基づいて、電動パーキングブレーキ装置50を駆動する自動変速機ECU60と、を備えている。
(もっと読む)
車両用ブレーキ制御装置
【課題】ブレーキの効き遅れを防止できる車両用ブレーキ制御装置を提供する。
【解決手段】緊急ブレーキ時に、第1、第2常開弁SNO1、SNO2や第1〜第4リニア弁SLFL、SLFR、SLRR、SLRRおよび第1、第2モータ11、12への通電の開始に対して、第1、第2常閉弁SWC1、SWC2への通電に遅延時間T1を設けることで、ブレーキペダル1が踏み込まれた直後には調圧回路が遮断されるようにする。このため、調圧回路を通じてブレーキ液が返流されてしまうことが防止でき、W/C圧の立上りが遅れや、それに起因するブレーキの効き遅れを防止することが可能となる。
(もっと読む)
真空式制動倍力装置と当該装置を操作する方法
本発明は、自動車ブレーキシステムの真空式制動倍力装置と、その真空式制動倍力装置(1)を操作する方法に関する。この制動倍力装置はハウジング(5)を持ち、このハウジングは、少なくとも1つの可動型の隔壁(4)によって、少なくとも1つの負圧室(3)と少なくとも1つの作動室(2)とに区分されている。負圧室(3)は負圧接続口(10)を経由して負圧源に接続されている。また、負圧室(3)にはセンサーユニット(6)が割り当てられ、当該センサーユニットは、負圧室(3)内の圧力を検出して、それを電子的制御ユニット(11)に送る。この制御ユニットは、負圧室(3)内で検出された圧力を評価する評価ユニットを備える。また当該制御ユニットは、真空式制御倍力装置(1)の飽和点を、負圧室(3)内を支配する圧力だけに基づいて計算する。
全体システムの監視を支援するため、本発明は、センサーユニット(6)が測定した圧力数値の妥当性チェックを行う。そしてセンサーユニット(6)又は真空式制動倍力装置(1)に故障があればそれを検知する。  (もっと読む)
(もっと読む)
制御ブースタ
【課題】ブレーキペダルからの入力とは別にコントローラによって自動制御可能な制御ブースタにおいて、自動制御時におけるブレーキペダルへの入力の有無を判定する。
【解決手段】ブレーキペダル30によって入力ロッド16を操作し、制御バルブ15によって変圧室4B、5Bに大気(正圧)を導入し、定圧室4A、5A(負圧)との間に生じる差圧によってサーボ力を発生させる。また、コントローラ39によってソレノイド23に通電して自動ブレーキ装置22を作動させて、制御バルブ15を操作することによって制動力を制御する。ピン29と長穴34との係合によって入力ロッド16とブレーキペダル30とを相対変位可能とし、ペダル変位センサ35及びロッド変位センサ36によって、ブレーキペダル30と入力ロッド16との相対変位を検出し、この相対変位に基づいて、自動ブレーキ装置22の作動時におけるブレーキペダル30への入力の有無を判定する。
(もっと読む)
気圧式倍力装置
【課題】気圧式倍力装置において、急制動時にサーボ力を迅速に立ち上げて必要な制動力を確保する。
【解決手段】ハウジング内を定圧室(負圧)と変圧室とに画成するパワーピストンにバルブボディ2を連結する。バルブボディ2内のリアクションディスク3とプランジャ9との間にブレーキアシスト機構10を介装する。プランジャ9の移動によって、ポペットシール12を開き、変圧室に大気を導入してパワーピストンに推力を発生させる。急制動時には、スリーブ21に対してプランジャロッド23が前進し、ボール30が外側へ逃げてプランジャロッド23がリアクションロッド22に直接当接する。これにより、ブレーキアシスト機構10が短縮するので、リアクションディスク3からの反力を受けることなくプランジャ9の移動量を大きくすることができ、サーボ力を迅速に立ち上げることができる。
(もっと読む)
電気機械式制動作動装置
【課題】電気機械式制動作動装置。
【解決手段】本発明は、電気機械式制動作動装置(7)を操作する方法に関していて、複数のディスクに選択的に制動力を掛けるための、複数のディスクに隣接するプッシャー(8)を駆動するようになっている電動モータを包含し、方法は、運転の定義域が、電流/速度の座標面にプロットされる一定電力曲線(14)にほぼ沿って延伸する部分を有する、境界線(15)を与えるために選択されるやり方で、電流/速度の座標面の与えられた運転の定義域(D’)の中で、作動装置を運転する段階を含む。
(もっと読む)
41 - 60 / 85
[ Back to top ]