
Fターム[3D232DA03]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角 (3,968) | ハンドル操舵角 (2,938)
Fターム[3D232DA03]に分類される特許
61 - 80 / 2,938
操舵支援装置
【課題】ドライバの運転意思に応じて制御方法を適切に変更する操舵支援装置を提供する。
【解決手段】自車両が走行車線に沿って走行するように操舵機構に操舵力を付与する操舵支援装置を、環境認識手段と、環境認識手段を用いて目標走行位置を設定する目標走行位置設定手段と、自車両の横位置を認識する自車横位置認識手段と、目標走行位置と横位置との偏差に基づいて目標操舵力を設定する目標操舵力設定手段と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段と、ドライバの運転意思を判定する運転意思判定手段とを備え、目標操舵力設定手段は、偏差の増加に応じて増加するよう設定される第1の目標操舵力と、偏差が所定値以上の時のみ所定の値に設定される第2の目標操舵力とを有し、操舵制御手段は、ドライバの運転意思が高い状態と判定されたときは前記第1の目標操舵力に基づいて操舵力を付与するとともに、運転意思が低下状態と判定されたときは第2の目標操舵力に基づいて操舵力を付与する構成とする。
(もっと読む)
車両のパワーステアリング制御装置

【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
車両操舵装置の制御装置
【課題】車両の走行経路と目標経路とのずれを小さくすることのできる車両操舵装置の制御装置を提供する。
【解決手段】左転舵輪20は、中心点Pを幅方向に通る中心軸Hj周りに、ドライブシャフト64の回転に伴って回転可能にナックル62に取り付けられている。左転舵輪20の中心点Pを径方向に通る軸Tjを、左転舵輪20の中心点Pを幅方向に通る中心軸Hj周りに回転させたときにできる回転面から、衝撃吸収機構65の中心軸Kjが、ドライブシャフト64側に傾斜角θkだけ傾斜するようにナックル62を取り付ける。この中心軸Kj周りの左転舵輪20の回転角度を転舵要素角θtとして、この左転舵輪20の向きの制御に用いる。右転舵輪についても同様である。
(もっと読む)
後輪操舵車両
【課題】後輪トー角可変制御装置を備えた車両において、後輪を操舵しても操舵フィーリングを悪化させないパワーステアリング装着車両を提供する。
【解決手段】後輪操舵式の自動車1において、左右の前輪4L,4Rを転舵するステアリングホイール11と、ステアリングホイール11の作動に応じて左右の前輪の転舵をアシストするEPSトルクを付与する電動パワーステアリング装置16と、左右の後輪6R,6Lに対して設けられた左右の伸縮アクチュエータ21L,21Rを個別に駆動制御することにより、左右の後輪6のトー角を前輪4の操舵方向と同相または逆相あるいはトーインまたはトーアウトに変化させる後輪トー角可変制御装置20とを備え、電動パワーステアリング装置16は、左右の後輪6のトー角に応じてEPSトルクを増減させるように構成する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
車両の操舵抵抗付与装置
【課題】操舵の切り始めと戻し始めの微小操舵域において良好な操舵感が得られるとともに、ステアリングの剛性感を高めて高速走行時の安心感の向上を図ることができる車両の操舵抵抗付与装置を提供すること。
【解決手段】筒状のステアリングコラム1内に挿通する回転可能なステアリングシャフト2の回転に抵抗力を付与する抵抗付与手段5を設け、該抵抗付与手段5によって付与される抵抗力を車速に応じて変更する車両の操舵抵抗付与装置において、前記抵抗付与手段5をステアリングホイール4の近傍に配置するとともに、操舵角に基づいて算出される操舵速度の変化によってステアリングの切り始めを検知し、ステアリングの切り始め領域において前記抵抗付与手段5によって付与される抵抗力を他の領域において付与される抵抗力よりも大きく設定する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
多相回転機の制御装置
【課題】 2組の巻線組を有する多相回転機の駆動を制御する、2系統のインバータを備えた制御装置において、故障した系統のインバータまたは対応する巻線組で発生する電流を抑制し、過剰な発熱を防止する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれモータ80(多相回転機)を構成する2組の巻線組801、802に電力を供給する。仮に、第1系統の故障検出手段751がインバータ601のショート故障を検出したとき、制御部65は、第1系統インバータ601への出力を停止する。また、正常系統である第2系統インバータ602への出力について、回転角センサ85が検出したモータ80の回転数Nが高いほど出力を小さくするように制限する。これにより、逆起電圧によって発生する電流を抑制し、故障系統(第1系統)における過剰な発熱を防止することができる。
(もっと読む)
モータ制御装置及びこれを備える電動パワーステアリング装置。
【課題】三相ブラシレスモータを二相駆動する際に効率よく駆動電圧をモータの正常相に印加することのできるモータ制御装置及びこれを備える電動パワーステアリング装置を提供する。
【解決手段】信号出力部は正常相を二相駆動するに際し、ロータの回転に伴って各正常相に発生する誘起電圧と相似する正弦波の駆動電圧を誘起電圧に追従する態様で各正常相に対し印加すべく制御信号の生成態様を変更する制御信号変更処理を実行する。
(もっと読む)
車両の操舵制御装置及び操舵制御方法
【課題】転舵モータの過熱時に操舵輪と転舵輪とを機械的に結合しても、運転者が負担する操舵トルクの増加を抑制することが可能な、車両の操舵制御装置及び操舵制御方法を提供する。
【解決手段】操舵輪32の操作に基づいて転舵輪24を転舵させる転舵モータ2の温度が、予め設定したクラッチ締結温度を超えているか否かを判定し、転舵モータ2の温度がクラッチ締結温度を超えていると判定すると、操舵輪32と転舵輪24との間のトルク伝達経路を機械的に分離する開放状態にあるクラッチ6を、トルク伝達経路を機械的に連結した締結状態に切り換えた後も、操舵輪32の操作に応じた目標転舵角を算出し、この算出した目標転舵角に応じて転舵トルクを制御する転舵モータ2の駆動制御を継続させる。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
操舵補助制御装置
【課題】操舵補助制御実行中における運転者の適正な関わりを検出するとともに、運転者の操舵補助制御に対する監視放棄を抑制することのできる操舵補助制御装置を提供すること。
【解決手段】操舵補助制御中の第1所定時間経過後に(S1)、アシストトルクを通常の操舵補助制御に基づく目標アシストトルクから運転監視確認用アシストトルクに調整し(S2〜S4)、所定期間内に運転者の反応が検出されなかった場合には(S5、S7)、運転者への警告を発するとともに操舵補助制御を停止する(S8)。
(もっと読む)
油圧式パワーステアリング装置
【課題】油圧制御バルブの開度が急変して作動油の圧力が低下した場合に、パワーシリンダへの作動油の供給量が低下するのを抑制できる油圧式パワーステアリング装を提供する。
【解決手段】ポンプ回転数補正部63は、バルブ開度指令微分値演算部71と、ポンプ回転数補正値演算部72と、補正値加算部73とを含んでいる。バルブ開度指令微分値演算部71は、バルブ開度指令値設定部52によって設定されるバルブ開度指令値θB*の時間微分値(バルブ開度指令微分値)を演算する。ポンプ回転数補正値演算部72は、バルブ開度指令微分値に基づいて、ポンプ回転数指令値VP*の補正値(ポンプ回転数補正値)を演算する。補正値加算部73は、ポンプ回転数補正値を、ポンプ回転数指令値設定部62によって設定されたポンプ回転数指令値VP*に加算する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】複数の演算制御装置による車両制御において、異常状態から正常状態への復帰を適切に行うことができる車両制御システムおよび車両制御方法を提供することを課題とする。
【解決手段】本発明は、通信手段により互いに通信可能に接続された第1演算制御装置と第2演算制御装置とを備える車両制御システムであって、第2演算制御装置は、第1演算制御装置により演算された第1の目標制御量と、第2演算制御装置により演算された第2の目標制御量との差が、第1閾値以下である場合は、通信状態が正常であることを示す監視結果を、第1演算制御装置へ送信し、第1演算制御装置は、第2演算制御装置により送信された監視結果が正常であり、かつ、第1の目標制御量が第2閾値以下であると判定した場合、第2演算制御装置に転舵制御を実行させる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】ブラシ付きのモータに対する電流の目標値の大きさに関係なく該モータで発生する誘起電圧を算出できると共に、該誘起電圧の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に対する電流目標値Itを設定する電流目標値設定部30と、電圧センサ23からの検出信号に基づき電圧検出値Vdを検出する電圧検出部50と、バッテリ24の電源電圧Vpsに基づき電圧推定値Veを算出する電圧算出部51と、電流目標値Itが「0(零)」以外の値に設定される場合には電圧推定値Veに基づいた端子間電圧Vtを用いてモータ12で発生する誘起電圧Eを算出する一方、電流目標値Itが「0(零)」に設定される場合には電圧検出値Vdに基づいた端子間電圧Vtを用いて誘起電圧Eを算出する誘起電圧オブザーバ38と、を備えている。
(もっと読む)
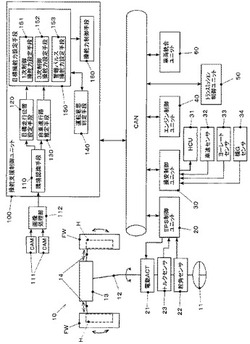
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
61 - 80 / 2,938
[ Back to top ]