
Fターム[3D232DA09]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角速度 (667) | ハンドル操舵角速度 (608)
Fターム[3D232DA09]に分類される特許
21 - 40 / 608
車両および車両制御プログラム
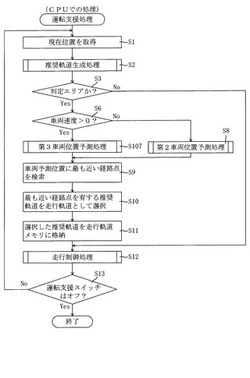
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム

【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドル切り込み状態時における、快適な操舵フィーリングを得ることのできる電動パワーステアリング装置を提供することにある。
【解決手段】操舵トルクが所定値以上であり、かつ操舵トルクの微分値が0より大きい場合か、又は、操舵トルクが所定値以下であり、かつ操舵トルクの微分値が0より小さい場合には、切り込み状態と判定し、切り込み状態と判定した条件以外の場合には、切り戻し状態と判定する。そして、切り込み状態と判定した場合のみ、ダンパー補償制御、及び慣性補償制御を有効となるようにする。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサにより操舵トルクを検出することができなくなった場合においても、モータによる操舵アシスト力を切り込み方向及び切り戻し方向の両方向に付与することを可能とし、特に、切り込み方向において切り込みすぎを防止しつつ適切なアシスト力を付与する電動パワーステアリング装置を提供する。
【解決手段】異常検出部80によりトルクセンサ20の異常が検出されたとき、レゾルバ58により検出されている回転角θrとアシスト電流特性とに基づいてモータ24を駆動し、駆動する際、回転角θrに基づき算出される回転角速度が大きくなるに従いモータ24を駆動するアシスト電流Iaを小さくするよう制御したので、切り込み方向において切り込みすぎを防止しつつ適切なアシスト力を付与することができる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合においても、モータによる操舵アシスト力を切り込み方向及び切り戻し方向の両方向に付与し、特に、保舵時において適切なアシスト力を付与する電動パワーステアリング装置を提供する。
【解決手段】トルクセンサの異常が検出されたとき、モータのレゾルバにより検出されている回転子回転角とアシスト特性102に基づき前記モータを駆動し、前記回転子回転角に基づき算出される回転子回転角速度の絶対値が所定値以下になったときに、前記モータを駆動する電流Iaを低減する処理を開始し、回転子回転角速度の絶対値が所定値以下の状況が所定時間継続する場合には、電流Iaを低減する処理を中断し、中断時点のアシスト電流Iakを流すようにしたので、保舵時において適切なアシスト力を付与することができる。
(もっと読む)
パワーステアリング装置
【課題】必要流量に応じた最適なポンプの駆動状態を達成可能なパワーステアリング装置を提供する。
【解決手段】第1のポンプMPの失陥時にも継続して操舵アシストを行うことができる。また、第1のポンプと第2のポンプSPとから共に作動液を供給することで、第1のポンプの固有吐出量を低減でき、第1のポンプの駆動負荷を低減することで、直進時のような必要流量が少ない状態における省エネ効果を向上することができる。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ドライバが、広い運転領域で操舵輪のグリップ状況を舵力インフォメーションとして舵力で感じとりながら安心して適切な運転を行う。
【解決手段】操舵制御部は、ハンドル角と車速に応じて車両の運動モデルに基づき目標横加速度Gytを算出し、実際の横加速度と目標横加速度Gytとの偏差(横加速度偏差)ΔGyを算出し、操舵速度の絶対値と車速とに応じて現在の操舵状態がドライバが舵力をフィードバックして操舵している状態か否か判定し、ドライバが舵力をフィードバックして操舵している状態と判定し、且つ、横加速度偏差ΔGyが予め設定しておいた設定値CG以上の場合は、車速と操舵トルクを基に設定する基本アシストトルクTbを増加する方向に補正して、この補正した基本アシストトルクTbをアシストトルクTaとしてモータ駆動部に出力する。
(もっと読む)
操舵装置
【課題】運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の環境を特定する特定手段と、特定された環境に基づいて、操舵ハンドルに発生させる操舵減衰力を制御する制御手段とを備える。ダンピング制御部130は、基本ダンピング制御部131によって設定した基本ダンピングトルクTbと、調整ゲイン設定部1341によって道幅判定値に応じて設定した調整ゲインGaとの積をダンピングトルクとして設定する。
(もっと読む)
MDPSの自動フルターン作動制御方法
【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】 衝突回避時等における操舵性や安定性の向上等を実現した電動パワーステアリング装置を提供する。
【解決手段】 ステップS6で衝突回避支援装置25から緊急時フラグFemgが入力しているか否か(Femg=1であるか否か)を判定し、この判定がNoであればステップS7で通常時操舵角速度差DTωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定し、YesであればステップS8で緊急時操舵角速度差DMωに所定の変換係数Kを乗じることによって操舵反力トルクベース値Trbを算出/設定する。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
移植機
【課題】電動ステアリング機構と、電動ステアリング機構を介した操向制御を行う制御部を備え、直進走行後に走行機体を旋回させるための操向操作を自動的に行う自動旋回制御を行うにあたり、オペレータの意図に沿って自動旋回制御を実行する移植機を提供することを課題とする。
【解決手段】本発明は、電動ステアリング機構34と、電動ステアリング機構34を介した操向制御を行う制御部21とを備え、制御部21が、直進走行後に走行機体4を旋回させるための操向操作を自動的に行う自動旋回制御を行う移植機であって、走行機体4の旋回方向を選択する操作を検出する操作検出手段を設け、制御部21は、操作検出手段によって旋回方向の選択操作が検出されたことを少なくとも1つの条件とし、畦際での旋回である小回り旋回が可能な切れ角になるまで該選択された旋回方向に電動ステアリング機構34を自動的に操向作動させる自動旋回制御を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングの操舵状態の判定結果について誤りが生じる頻度を少なくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータの電流(モータ電流Im)と、ステアリングの操舵速度ωsとに基づいて、ステアリングの操舵状態を判定する。すなわち、ステアリングが中立位置以外の位置で保持されている状態を保舵状態とし、ステアリングが中立位置にある状態を中立状態とし、操舵速度ωsが判定値ωaよりも小さく、かつモータ電流Imが基準値Ixよりも大きいとき、ステアリングの操舵状態が中立状態か否かを判定する。そして、操舵速度ωsが判定値ωaよりも小さく、かつモータ電流Imが基準値Ixよりも大きく、かつ前回判定時にステアリングの操舵状態が中立状態にある旨判定しているとき、ステアリングの操舵状態が中立状態にある旨判定する。
(もっと読む)
パワーステアリング装置
【課題】スリップ発生時に生じるトルクステアを抑えられるパワーステアリング装置を提供する。
【解決手段】コントローラがパワーステアリング出力部に供給される作動油の流量を制御する車両のパワーステアリング装置であって、車両が雪道やぬかるみ等の滑りやすい路面上を走行する際に、左右の車輪の一方が路面に対して滑るスリップが生じるとスリップ時指令値I3が高まり、スリップ時指令値I3に基づいてパワーステアリング出力部に供給される作動油の流量が制御される構成とした。
(もっと読む)
21 - 40 / 608
[ Back to top ]