
Fターム[3D232DA09]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角速度 (667) | ハンドル操舵角速度 (608)
Fターム[3D232DA09]に分類される特許
81 - 100 / 608
車両用操舵装置
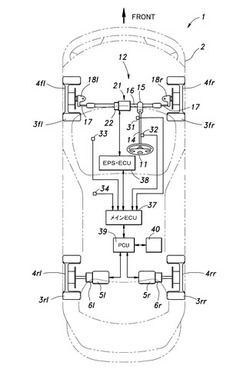
【課題】後輪の回生ブレーキとして機能するモータを有する車両において、回生制動時の車両挙動の変化を抑制して運転者の操舵フィールを向上させる。
【解決手段】左右後輪4rl,4rrを駆動するモータ5l,5rを回生ブレーキとして用いる電動パワーステアリング装置21において、車両挙動に応じて補助反力トルクを制御する補助反力トルク設定部を備え、補助反力トルク設定部が、モータによる回生が行われた場合に補助反力トルクを増大させる構成とした。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車

【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
操舵制御装置
【課題】インバータの出力低下を少なくとも抑制しつつ、そのインバータの発熱を抑制できる操舵制御装置を提供する。
【解決手段】インバータ13bのPWM制御におけるキャリア周波数を、搬送波生成部28がインバータ温度Tiに応じて制御する。搬送波生成部28は、インバータ温度Tiが所定のキャリア周波数低減設定温度を超えているときに、インバータ温度Tiが所定のキャリア周波数低減設定温度以下であるときよりもキャリア周波数を低く設定することにより、インバータ13bにおけるスイッチング損失を低減して当該インバータ13bの発熱を抑制する。
(もっと読む)
車両用舵角制御装置及び車両用舵角制御方法
【課題】前輪転舵アクチュエータ5の異常が解消してから通常の4輪操舵制御に復帰する時間を短縮する。
【解決手段】前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出していない場合には、後輪の転舵角を中立位置の角度に制御すると共に前輪転舵アクチュエータ5の駆動を禁止し、前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出している場合には、上記前輪転舵アクチュエータ5及び後輪転舵アクチュエータ9の駆動を禁止する。更に、上記後輪転舵アクチュエータ9の異常を検出した後に、当該後輪転舵アクチュエータ9の異常が検出されなくなると、上記後輪の転舵角を中立位置の角度に制御する。
(もっと読む)
車両用操舵制御装置
【課題】バッテリ電圧が低下した場合に、バッテリにかかる負荷を抑えつつ、操舵ハンドルの中立位置と転舵輪の車両直進位置との間のずれを補正する。
【解決手段】車両用操舵制御装置10は、操舵ハンドル12に連結された操舵軸14上に設けられ、転舵輪18に対して転舵角を与えるVGRSアクチュエータ20を備える。VGRS−ECU22は、バッテリ28の電圧が所定の第1閾値電圧以下になったことが検出されたときに、VGRSアクチュエータ20の回転角を固定する。そして、操舵ハンドル12が切り戻されているときに、VGRSアクチュエータ20の回転角が固定された際に発生した操舵ハンドル12の中立位置と転舵輪18の車両直進位置との間のずれを補正する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ10が、回避制御を実行するべきと判定した時点における自車両1の運転者の車両操作量に基づいて回避制御の動作範囲を設定し、設定された回避制御の動作範囲内で自車両1が障害物Oと接触することを回避する走行経路を回避経路として算出し、算出された回避経路に沿って走行するように運転者の車両操作を支援する。これにより、個々の運転者によって異なる回避操作の許容範囲を反映した回避制御を行うことができるので、運転者が回避制御に対して感じる違和感を低減することができる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】車両の駐車目標位置までの移動時間の短縮を図りながら、移動の際の軌跡ずれを生じさせずに車両を駐車目標位置へと誘導できるようにする。
【解決手段】自車の操舵及び駆動・制動を自動制御して自車を誘導軌跡に沿って駐車目標位置へと移動させる際に、駐車支援コントローラ1が、自車の舵角速度に応じて制御車速(上限速度)を可変制御し、誘導軌跡上で舵角速度が大きくなる位置では制御車速が低く、逆に舵角速度が小さくなる位置では制御車速を高くなるように、誘導経路上の各位置における舵角速度に応じて制御車速を設定する。
(もっと読む)
車両用操舵装置、車両用操舵方法、車両用操舵装置付き車両
【課題】ステアリングホイールと機械的に切り離されたいわゆるステアバイワイヤを有する車両に於いて、操向輪の転舵角がステアリングホイールの操舵角に応じて制御できなくなった場合、システムがバックアップに切り替えられるが、この間、運転者に違和感を与えることのない車両用操舵装置を提供する。
【解決手段】ステアリングホイールと機械的に切り離された操向輪の転舵角が、ステアリングホイールの操舵角に応じて制御できなくなったとき、ステアリングホイールと操向輪との連結が完了するまでの間、操向輪の転舵角の制御ができなくなる直前の操向輪の転舵角状態に応じて、操向輪の転舵角を制御する。
(もっと読む)
パワーステアリング装置
【課題】高効率で且つ操舵フィーリングに優れたパワーステアリング装置を提供する。
【解決手段】操舵補助力を発生用の油圧ポンプ22を駆動するための電動モータ24を、ECU25がPWM制御する。ECU25は駆動方式を120度通電方式および180度通電方式に択一的に切り替える駆動方式切替部38を備える。駆動方式切替部38は、実回転速度演算部35により演算された実回転速度ωに基づいて駆動方式を切り替える通常制御部381と、通常制御部381による切替に拘らず目標回転加速度演算部40により演算された目標回転加速度αに基づいて駆動方式を切り替える最適化制御部382とを含む。
(もっと読む)
操舵負荷推定装置及び電動パワーステアリング装置
【課題】操舵負荷からヒステリシス特性を精度良く除去すること。
【解決手段】操舵輪を直進状態から転舵させようとする操舵トルクに基づいて推定される操舵負荷Txには、主にギヤロスに起因してヒステリシス特性が含まれる。このギヤロスの大きさは、操舵トルクの大きさに依存して変化し、操舵トルクが大きくなるほど、ギヤロスの大きさも大きくなる。そこで、推定操舵負荷Txに所定比率の係数を乗じることによって、補正値を求める。従って、補正値は、推定操舵負荷Txが大きくなるほど大きくなり、逆に推定操舵負荷Txが小さくなるほど小さくなる。このように算出された補正値を用いて、操舵負荷を補正することにより、推定操舵負荷Txのヒステリシス特性を精度良く除去して、より路面反力に近似する補正操舵負荷Tx’を求めることができる。
(もっと読む)
電動パワーステアリング装置
【課題】 ハンドルとられに迅速に対応することができる電動パワーステアリング装置を提供する。
【解決手段】 少なくとも操舵トルクに応じて操舵アシスト力を制御する電動パワーステアリング装置1において、左右前輪7l,7rの車輪速を検出する車輪速検出センサ16l,16rと、車体のヨーレートを検出するヨーレートセンサ14と、車輪速検出センサ16l,16rにより検出された左右前輪7l,7rの車輪速の差を実車輪速差として設定する実車輪速差設定部32と、ヨーレートセンサ14により検出されたヨーレートに基づいて車体の旋回に起因する左右前輪7l,7rの車輪速差を旋回起因車輪速差として設定する旋回起因車輪速差設定部33と、実車輪速差と旋回起因車輪速差との差に基づいて操舵アシスト力を補正する補助反力トルク設定部24とを有することを特徴とする。
(もっと読む)
ステアリング装置、及びステアリング制御方法
【課題】操舵制御を停止する際の誘導感を軽減する。
【解決手段】前方物体との接触を回避する必要が発生したときに、先ず前方物体との接触を操舵回避できれば(ステップS2の判定が“Yes”)、目標回避軌道を算出し(ステップS3)、その目標回避軌道を実現する操舵角となるように、電動モータ20を駆動制御する(ステップS4)。一方、操舵回避できなければ(ステップS2の判定が“No”)、操舵速度θ′に応じて目標操舵反力を算出し(ステップS5、S6)、この目標操舵反力を実現するトルクとなるように、電動モータ20を駆動制御する(ステップS7)。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】車両起因による片流れの抑制を精度良く行うことができる車両用操舵装置及び車両用操舵方法を提供する。
【解決手段】車両の直進走行状態を検出したときの転舵トルクTpの履歴に基づいて、直進走行時の転舵トルクTpを打ち消す方向の片流れ抑制操舵補助トルクを操舵系に付与する片流れ抑制制御を行う。このとき、操舵トルクTとヨーレートφとの差|T−φ|が所定の閾値TH1以上であるときには、操向輪の転舵に対して車両挙動が遅れている状態であると判断する。そして、この場合には、車両の直進走行状態を非検出として、そのときの転舵トルクTpを上記履歴に含めない。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、オーバーステア発生時における車両の挙動を好適に安定化させるとともに、オーバーステアの限界領域でドライバに違和感を及ぼすことを抑制し、また、制動力制御を終える際の制御の収束性を高めることができるようにする。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30と、を備えた車両の運動制御装置であって、制動及びエンジン制御ECUが車両のオーバーステア状態を検知して制動力制御を開始するタイミングを検出したことに基づいて、操舵制御ECUの制御が中止される、ことを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、通常時には操舵角制御を反映した実際のタイヤ切れ角に基づいた制動力制御を行う一方、オーバーステア発生時にはタイヤ切れ角の変化が不連続になることによる制動力制御の制御性の悪化を抑制し、或いは、制動力制御に用いる操舵角信号を車両状態に応じて使い分けて、状況に応じた制動力制御の制御性を確保する。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30とを備え、操舵制御ECUが車両オーバーステア時に補正するオーバーステア時操舵角補正量を、制動及びエンジン制御ECUが車両制動力の制御に用いる操舵角信号に反映させないように構成されていることを特徴とする。
(もっと読む)
車両用運動制御装置
【課題】発生ヨーモーメントの低下を補うためのヨー発生装置の制御手段が、他の転舵制御手段と協調して作動する制御装置を提供する。
【解決手段】本発明に係る車両用運動制御装置は、操舵車輪の転舵角を変更可能な操舵アクチュエータ22を備えた車両に搭載されている。目標転舵角設定手段12,41と、実転舵角検出手段18と、実転舵角を目標転舵角に一致させるように操舵アクチュエータ22を駆動制御する第1の転舵制御手段41と、第1の転舵手段41の介入度に応じてヨー発生装置24を駆動制御する第2の転舵制御手段42,50とを備える。
(もっと読む)
ステアリング装置内の目標操舵トルクの決定
操舵トルクを制御するための制御コンセプトを有するSbWシステムおよびEPSシステム用に目標操舵トルク(torTB)を生成することによって実現される操舵感覚が、異なるステアリングもしくは車両型式または要求条件に適合可能であり、すべての走行状態および走行状況において得られる操舵感覚が今日市場にある油圧式および電気機械式ステアリングシステムと比較して等価な操舵感覚または改善された操舵感覚を有するようにするために、外部から作用する力(torR)と車両速度(velV)とに依存して基本操舵トルク(torB)を決定し、操舵速度(anvSW)と前記車両速度(velV)とに依存して減衰トルク(torD)を決定し、前記操舵速度(anvSW)と前記車両速度(velV)とに依存してヒステリシストルク(torF)を決定し、ステアリングホイール角度(angSW)と前記車両速度(velV)とに依存して直進位置方向への中心トルク(torCF;torC)を決定し、前記基本操舵トルク(torB)と前記減衰トルク(torD)と前記ヒステリシストルク(torF)と前記中心トルク(torCF;torC)とで個別成分を形成し、前記個別成分に依存して目標操舵トルク(torTB)を決定することが提案される。  (もっと読む)
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】運転者による障害物回避操作をより適切に支援できるようにすること。
【解決手段】障害物検出手段が、自車両の周囲の障害物の位置を検出する。また、存在確率分布推定手段が、検出した位置および障害物検出手段の特性により当該位置に含まれる検出誤差の性質に基づいて、自車両の周囲における障害物の存在確率分布を推定する。そして、回避支援手段が、推定した存在確率分布に基づいて、運転者による障害物回避操作を支援する。そのため、例えば、障害物検出手段の特性により検出結果に含まれる検出誤差、つまり、障害物の位置の検出誤差が大きい場合に、障害物の存在確率を低減することができる。そして、障害物回避操作の支援量を低減できる。その結果、運転者による障害物回避操作に当該回避操作の支援が干渉することを抑制できる。したがって、運転者による障害物回避操作をより適切に支援できるようになる。
(もっと読む)
81 - 100 / 608
[ Back to top ]