
Fターム[3D232DA49]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | エンジン状態 (193) | 回転数 (118)
Fターム[3D232DA49]に分類される特許
1 - 20 / 118
ハイブリッド車両のパワーステアリング装置
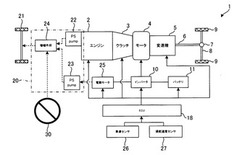
【課題】ハイブリッド車両の走行状態に関わらず、良好な燃費性能を確保しつつ、大きな操舵トルクを出力可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】ハイブリッド車両1のパワーステアリング装置20は、モータ回生走行時やモータ発進時にエンジン2が停止状態にあり、且つ、クラッチ3が切断状態にある場合、ハイブリッド車両1の走行速度に応じて、パワーステアリング装置において操舵トルクを増幅する増幅手段24の駆動源である、電動モータ25とエンジン2を選択的に切り替える。
(もっと読む)
電動パワーステアリング制御装置

【課題】車載装置からの指令に基づく制御と通常のパワーステアリング制御との両立を安価な手段で実現可能な電動パワーステアリング制御装置を得る。
【解決手段】メインマイコン503とメインマイコン監視回路511とを備える。メインマイコン503は、トルク信号TRQに基づきパワーステアリング指示電流ImtEPSを決定するパワーステアリング制御部503cと、自動駐車制御信号PASigに基づき自動駐車制御電流ImtPAを決定する自動駐車制御部503dと、モータ電流指示値Imt1を切替える切替信号生成処理部503eおよびモータ電流切替部503fと、監視特性を切替える監視回路モード選択部503jおよび監視回路特性切替部503mとを有する。メインマイコン監視回路511は、モータ電流検出信号Imdが制限値を超えた場合に異常状態と判定して制御を停止する。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
電動パワーステアリング装置
【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力が付与される際における操向車輪のセルフアライニングトルクの不足を補償し得る車両の操舵力制御装置を提供する。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力Bq[f*]が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段TQが備えられる。操舵角Saaと、制動制御によって操向車輪に付与される制動力Bq[f*]とに基づいて、操舵力発生手段TQにより操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力Bq[f*]が大きいほど、また、操舵角Saaが大きいほど、より大きい値に調整される。
(もっと読む)
MDPSの自動フルターン作動制御方法
【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
電動パワーステアリング装置
【課題】CPUがリセットされた後、再始動された場合においても、正確な温度推定と過熱保護を行うことができ、モータやFETを発熱による焼損から保護することができる電動パワーステアリング装置を提供することを目的としている。
【解決手段】周囲温度Tempを検出する温度センサ904と、ECUの内部温度を推定する温度推定処理部903と、この推定温度Tcontと過熱保護制限電流Ovh−Irefとが記憶されるCPUの揮発性メモリ905と、過熱保護制限電流Ovh−Irefを導き出す過熱保護処理部902と、電流指令値Irefを算出する電流指令値処理部901と、電圧指令値Vrefを出力する比例積分回路906と、PWM信号を生成するPWM回路907と、PWM信号に基づきモータ120にモータ電流を供給するモータ駆動回路909と、で構成されている。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
走行車両自動操舵用駆動装置
【課題】異なる走行車両に対応する汎用性の高い自動操舵駆動装置を提供するとともに、緊急時の手動ハンドル操作を可能にする自動操舵駆動装置を提供すること。
【解決手段】電磁クラッチのオンオフにより中間軸駆動用の正逆転モータを作動制御してステアリングシャフトを自動操舵モードで駆動制御する自動操舵制御手段を設け、例えはクラッチペダルのオン、左又は右のブレーキペダルのオン又は前後進レバーが前進側又は後進側に移動されるなどの何らかの走行車両の挙動操作が行われると、該自動操舵制御手段は正逆転モータによる自動操舵モードを禁止する制御とすることで走行安全性を確保する。
(もっと読む)
電源回路及びこれを用いた電動パワーステアリング装置
【課題】電源回路の構成部品に単一故障が生じた場合に、この電源回路により電源供給を受ける装置に与える影響を低減する。
【解決手段】スイッチングレギュレータからなるA相及びB相の変換回路51及び52を並列に接続し、各変換回路51、52を構成する降圧用スイッチQ12、Q22を互いに180度ずらしてPWM駆動して、内部電圧Vbatを目標電圧Vmに降圧しこれを制御演算装置21にその動作電源電圧として供給する。また、各変換回路51、52において、降圧用スイッチQ12、Q22の上流側に異常時遮断用スイッチQ11、Q21をそれぞれ介挿し、過電流或いは変換電圧Vrega、Vregb等の回路故障が生じた側の変換回路51又は52の異常時遮断用スイッチQ11又はQ21を非導通状態に切り替え、正常な変換回路のみを降圧動作させて、制御演算装置21への動作電源電圧の供給を継続する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
1 - 20 / 118
[ Back to top ]