
Fターム[3D244AA01]の内容
Fターム[3D244AA01]の下位に属するFターム
Fターム[3D244AA01]に分類される特許
301 - 315 / 315
走行制御装置

【課題】先行車に追従する場合でも、自車両が必要以上に加減速しないようにできる。
【解決手段】走行制御装置は、自車両前方に先行車と先々行車とが存在しており(ステップS1、ステップS2)、その先行車が二輪車の場合において(ステップS3)、二輪車と先々行車との車間距離L1が距離L1d(Lmb)以下であり(ステップS8)、かつ自車両と二輪車との相対速度ΔVが相対速度ΔVd以上であり(ステップS9)、かつ道路幅方向において二輪車が先々行車の側面よりも外側にいるときには(ステップS10)、自車両と先々行車との車間距離である先々行車用車間距離L3が目標車間距離L*となるような走行制御にして、先々行車に追従するようにする。
(もっと読む)
運転支援装置

【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
車両の走行制御装置
【課題】
この発明は、先行車の走行状態を検出することで、予め先方の道路形状を予測検出して、自車の走行状態を制御する車両の走行制御装置において、加減速度の道路勾配に応じた補正のタイミングを適切にすることにより、運転者に違和感又は不安感を感じさせない車両の走行制御装置を提供することを目的とする。
【解決手段】
車両の加減速制御を行う車両の走行制御装置であって、レーダー波を自車Aの前方に発信して、先行車Bからの反射波に基づき、先行車Bとの距離L、相対速度ΔV及び先行車Bの高さHを検出するレーダー1と、前記先行車Bとの距離Lが目標距離となるよう実距離と目標距離との偏差に応じて車両の目標加速度を設定し、当該目標加速度になるように車両の走行装置であるエンジンや自動変速機を制御するコントローラーと、前記先行車Bの高さHの変化に基づき、自車A前方に存在する坂道極点(坂道の勾配開始地点)を算出し、当該坂道極点までの距離がゼロとなった時に、当該坂道の属性に応じて前記目標加速度を補正するコントローラー(加速度補正手段)とを備えたものである。
(もっと読む)
車両用走行制御装置
【課題】 追従モードの移行を容易にする。
【解決手段】 先行車追従走行制御を行う全車速領域を低速領域と高速領域の少なくとも2つの車速領域に区分し、低速領域において、先行車が検出されている場合は車間距離を保って先行車に追従走行するとともに、先行車が検出されていない場合は追従走行を解除する低速追従モードと、高速領域において、先行車が検出されている場合は設定車速を上限として車間距離を保って先行車に追従走行する制御を行うとともに、先行車が検出されていない場合は設定車速一定で定速走行する高速追従モードと、全車速領域において、所定の操作部材が操作されている間、設定車速に関わらず車間距離を保って先行車に追従走行する優先追従モードとを有する。
(もっと読む)
他車両検出装置及び車間距離制御装置
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
走行制御装置
【課題】先行車両からのスプラッシュにもかかわらず、より精確な車間距離を検出して車間距離に応じた車両の制御を行える走行制御装置を提供すること。
【解決手段】計測した自車両と先行車両との車間距離に応じて車両の制御を行う車両制御装置を備える走行制御装置において、先行車両が路面の水膜上を走行時に生じるスプラッシュ量を推定する(ステップS11)。推定したスプラッシュ量に応じて計測した車間距離の補正を行う(ステップS12及びステップS13)ようにした。
(もっと読む)
車両用走行制御装置
【課題】 定速走行を行う車速領域以外の車速領域において先行車追従走行および定速走行における上限車速を設定する。
【解決手段】 先行車追従走行を行う全車速領域を区分して少なくとも低速領域と高速領域を設定し、低速領域では、先行車がいるときは車間距離を保ちながら先行車に追従走行するとともに、先行車がいなくなると先行車追従走行を解除し、高速領域では、先行車がいないときは予め設定した上限車速(設定上限車速)で定速走行するとともに、先行車がいるときは設定上限車速を上限として車間距離を保ちながら先行車に追従走行する車両用走行制御装置において、高速領域以外の車速領域において設定上限車速を設定する。
(もっと読む)
運転支援方法およびシステム
【課題】
省エネルギー、排ガス汚染の防止、および交差点での安全走行を目的とした、交差点での車両のノンストップ通過の実現。
【解決手段】
交差点の手前一定距離Dの地点Pにおいて前記交差点の信号状態情報、前記距離D情報および前記通信領域−交差点間の許容最高速度情報から、交差点をノンストップで通過するための前記地点P−交差点間の推奨所要時間 、推奨走行速度 を演算し、車両側では前記交差点までの間を前記推奨走行速度で走行することによって交差点ノンストップ通過を実現する。
(もっと読む)
先行車追従走行制御装置
【課題】 追従走行モード切り換え時の利便性を向上する。
【解決手段】 設定車速が設定されている場合は、車速が低速領域から高速領域に入ったときに低速追従走行モードから高速追従走行モードへ自動的に移行する。また、低速領域の追従走行モードから高速領域の追従走行モードへのモード切り換え操作履歴が記憶されている場合は、車速が低速領域から高速領域に入ったときに低速領域の追従走行モードから高速領域の追従走行モードへ自動的に移行する。
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
車間距離制御装置
【課題】 本発明は、車間距離制御装置に関し、先行車両との関係で自車両が自動停車されることにより停止されたレーダによる照射を適当なタイミングで再開させることにより、車間距離制御を的確に実行させることを目的とする。
【解決手段】 車両前方にレーザ光を照射するレーダセンサを用いて先行車両との車間距離を制御するうえで、先行車両の停車に伴って自車両を停車させる車両停車制御を実行させる。車両停車制御により自車両の停車が開始された際には、レーダセンサによるレーザ光の照射を停止させる。そして、レーダセンサによるレーザ光の照射が停止された後、運転者により照射再開スイッチのオン操作が行われた際には、そのレーザ光の照射を再開させる。
(もっと読む)
自動車両用の速度調整システム
本発明は、設定可能な目標・速度に依存して駆動モーメント又は制動モーメントを計算するための手段を備えた自動車両用の速度調整システムに関し、この際、目標・速度は操作可能な操作要素の単一操作により設定される。本発明に従い、操作要素を継続操作する場合には目標・速度に代わり目標・加速度が設定され、この目標・加速度から駆動モーメント又は制動モーメントが計算される。 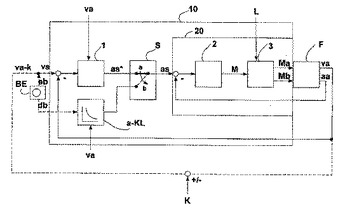 (もっと読む)
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。 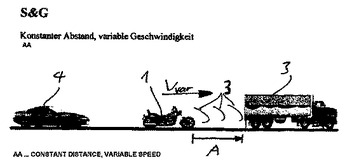 (もっと読む)
(もっと読む)
自動車の間隔制御システム
目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
自動車の燃費を低減する方法
【課題】
本発明は、自動車の燃費を低減する方法に関する。運転者の希望が、一定な走行速度後に決定され、運転者の希望が、一定な走行速度後に認識された後に、運転者によって指示されていない自動車速度の少なくとも一部が、自動車の駆動エンジンのガソリン又はディーゼル燃料の可能な僅かな燃費を考慮して制御される。
(もっと読む)
301 - 315 / 315
[ Back to top ]