
Fターム[3D244AA01]の内容
Fターム[3D244AA01]の下位に属するFターム
Fターム[3D244AA01]に分類される特許
141 - 160 / 315
運転支援装置、運転制御装置、及びプログラム
【課題】運転者の加速操作の特性を考慮して、適切な運転支援を行なうことができるようにする。
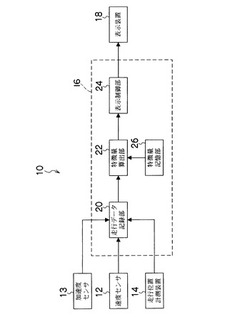
【解決手段】特徴量算出部22によって、車両走行時の車速の時系列データに基づいて、車両の運転者が加速操作を行なったときの加速終了地点で目標車速が得られるように一定加速度で走行したときの加速開始からの所要時間と、加速操作を行なったときの車速の時定数とに基づいて定まる、運転者の加速特性を表わす特徴量を算出する。そして、算出手段によって算出された特徴量に基づいて、運転支援を行う。加速特性を表わす特徴量を算出して、運転支援を行なうことにより、運転者の加速操作の特性を考慮した適切な運転支援を行なうことができる。
(もっと読む)
クルーズコントロール制御の設定車速変更装置

【課題】走行環境により適した変更速度で設定車速を変更することができるクルーズコントロール制御の設定車速変更装置を提供する。
【解決手段】ドライバーの操作に基づいてクルーズコントロール制御の設定車速を変更する。このとき、車両の速度が所定の閾値よりも大きい場合には、車両の速度と所定の閾値との差分を算出し、その速度差分が大きいほど変更速度を大きくする。
(もっと読む)
走行制御装置、走行制御システム
【課題】並列走行状態から縦列走行状態への移行が可能な走行制御装置、走行制御システム、を提供すること。
【解決手段】マスター車Mから送信される目標制御値に基づきマスター車Mと並列走行状態で隊列走行するスレーブ車Sの走行制御装置10であって、目標車速、及び、幅員方向における目標側方位置をマスター車Mから受信する受信装置21と、目標車速と当該スレーブ車Sの車速との車速偏差に基づき走行装置28,29の加速制御量又は減速制御量を決定する車間・車速制御部45と、目標側方位置と当該スレーブ車の側方位置との側方位置偏差に基づき操舵装置32の操舵制御量を決定する操舵量制御部46と、を有することを特徴とする。
(もっと読む)
車間距離制御装置
【課題】より安定した車間距離制御を行うことができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を所定の組合せの車輪速に基づいて検出する車速検出手段2aと、先行車両と自車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して得られる車間時間を目標車間時間以上として、先行車両と自車両との車間距離を目標車間距離以上に保つように目標加速度GBASEを演算する目標加速度演算手段2cと、目標加速度GBASEに基づいて自車両を制御する制御手段2dと、車輪の空転滑走状態を判定する判定手段2eと、空転滑走状態が判定された場合に、所定の組合せを変更する変更手段2fを備えることを特徴とする。
(もっと読む)
経路曲率に応じた車両の速度制御装置
【課題】
ドライバの感覚に合致する車両の速度制御装置を提供すること。
【解決手段】
瞬時毎の曲率を演算する手段と、自車の速度を制御する手段を備え、瞬時毎の曲率が増加傾向にあるときは、速度を減少させ、瞬時毎の曲率が減少傾向にあるときは、速度を増加させるように制御する。
(もっと読む)
車両の運転支援装置
【課題】複数パターンの追従目標車間距離を選択的に使用可能な場合にも、乗員に対して違和感を与えることなく円滑な追従走行制御を行うことができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、追従走行制御時のスロットル開度制御に供する目標車速Vtrgtを、追従目標車間距離Dtuijuと、追従目標車間距離Dtuijuよりも短い距離に設定された基準距離Dbaseと、先行車に対する車間距離Dnowとの相対関係に基づいて求める。これにより、複数パターンの追従目標車間距離を選択的に使用可能な場合にも、追従目標車間距離Dtuijuに対する車間距離Dnowの変化が目標車速Vtrgtに及ぼす影響度をモード毎に異ならせることができ、乗員に対して違和感を与えることなく円滑な追従走行制御を行うことができる。
(もっと読む)
車両制御装置
【課題】複数のアプリケーションを備えた場合に、汎用性に優れた車両制御装置を提供すること。
【解決手段】ステップ210では、対象物選択処理を行う。ステップ220では、危険物判定処理を行う。ステップ230では、(加減速ECU3から受信した)ブレーキに関するドライバ操作加速度が、所定の判定値αより小さいか否か、即ち、ブレーキが不十分であるか否かを判定する。ブレーキが十分でない場合は、ステップ240に進み、ブレーキアシスト制御の実行要求フラグをオンにする。また、ドライバ操作加速度に所定値βをかけた値を目標加速度に設定する。一方、ブレーキが十分な場合は、ステップ250に進み、ブレーキアシスト制御の実行要求フラグをオフにし、目標加速度を0に設定する。ステップ260では、実行要求フラグ、目標加速度、Max Jerk、Min Jerkを、加減速ECU3に送信する。
(もっと読む)
車両用駆動力制御装置
【課題】車両の駆動力を制御する車両用駆動力制御装置において、車両の駆動力を制御した後の車両が安定的な状態となるように制御することが可能な車両用駆動力制御装置を提供する。
【解決手段】タイヤのグリップ限界に基づいて前記タイヤにかかる出力トルクを制御する車両用駆動力制御装置であって、各輪の前記タイヤの駆動力の変化量と横力の合成力(FLn)と各輪の前記タイヤのグリップ限界(FTn)の比較結果に基づいて、前記タイヤにかかる出力トルクを制御する。前記各輪のタイヤのグリップ限界は、路面摩擦係数、前記各輪にかかる重量、及び重力加速度に基づいて設定される。
(もっと読む)
車両の速度制御システム、及び速度制御方法
【課題】車両の自動速度制御において、道路勾配及び車両質量の両者に配慮した速度制御を行う。
【解決手段】車両の速度制御システムは、車両に加わる力であって車両の安定走行が可能とされる力の限界である限界値を記憶する限界値記憶手段と、道路勾配を算出する勾配算出手段と、車両質量を算出する質量算出手段と、前記道路勾配と前記車両質量と前記限界値とを用いて、車両速度を決定する車両速度決定手段とを備える。
(もっと読む)
車両用追従走行制御装置
【課題】運転者が前方から視線をそらすことなく追従状態を容易に把握することが出来る車両用追従走行制御装置を提供する。
【解決手段】自車両の先行車両への追従状態を自車両の運転者に報知して運転者の運転を支援する車両用追従走行制御装置であって、自車両(1)の進行方向に位置する前方車両(2)を検出する前方車両検出手段(4)と、検出された前方車両から被追従対象車両を特定する追従車両特定手段(6)と、被追従対象車両に追従走行の情報を送信する追従情報送信手段(12,14)と、被追従対象車両に自車両を追従走行させる追従走行手段(6)と、追従走行送信手段による情報の送信信号を被追従対象車両が受信したとき、その被追従対象車両に設けられた報知装置(36)を作動させ、その報知装置の作動により自車両の運転者にその報知装置が作動した車両が被追従対象車両であることを報知させる報知装置作動手段と、を有する。
(もっと読む)
車両用追従走行制御装置
【課題】自動変速機付き車両において自動追従走行モードの操作性を向上させることが出来る車両用追従走行制御装置を提供する。
【解決手段】本発明によれば、先行車両に自動的に追従走行するオートクルーズ装置を有する自動変速機付き車両の車両用追従走行制御装置であって、ニュートラルのNポジションと、前進走行のDポジションとを有し、Nポジション及びDポジションが車体前後方向に直線状に配置され、シフトレバーが各ポジション間を直線的に移動可能となっており、さらに、オートクルーズモードをオンにする位置であるCポジションを有し、このCポジションが、Nポジション及びDポジションの直線状の配置の延長線上に車体前後方向に並べられ且つDポジションに隣接して配置され、Nポジション、Dポジション及びCポジションが、シフトレバーをこれらの各ポジション間で直線的に移動させることにより切り替えられるようになっている。
(もっと読む)
車速制御装置
【課題】ハンドル角を検出することなく、安価な構成で定速走行制御装置や車間距離制御装置に適用可能な車速制御装置を提供する。
【解決手段】設定された目標車速Vccと実車速Vとの偏差に基づいて車両の速度を制御する車速制御装置において、車両の操舵装置に入力される操舵トルクThを検出する操舵トルク検出手段2と、操舵トルクThに基づいて目標車速の補正量Varを求める車速補正量設定手段28と、目標車速に対する加速制御ゲインGaccの補正量Garを設定する加速制御ゲイン補正量設定手段32と、補正量Varに基づいて目標車速Vccを補正するとともに補正量Garに基づいて加速制御ゲインGaccを補正する補正手段30,34とを備えるように構成する。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】所定のオートクルーズを実行可能であると共に複数の運転モードの何れかを任意に選択可能なハイブリッド自動車において、オートクルーズをより適正なものとする。
【解決手段】ハイブリッド自動車20では、オートクルーズが実行される場合、パワーモードが選択されたときにアクセル開度Accが所定開度Accref未満であれば、フラグFpmcが値1に設定されると共にフラグFpmが値0に設定され(S540,S550)、オートクルーズに際してパワーモード時アクセル開度設定用マップの使用が禁止される。また、パワーモードが実行されているときに、オートクルーズの実行が指示された場合、アクセル開度Accが所定開度Accref以上である間、フラグFpmが値1に保持され(ステップS550)、オートクルーズに際してパワーモード時アクセル開度設定用マップの使用が許容される。
(もっと読む)
車両の運転支援方法及び車両の運転支援装置
【課題】異なる条件の後方車両の追突に対して、その異なる条件に応じて最適な運転支援をすることができる車両の運転支援方法及び車両の運転支援装置を提供する。
【解決手段】CPU2は、加速制御しても前方車両に追突する状態にあって後方車両との追突が回避できないと判断したとき、後方車両の車速及び自車両の車速の他に、自車両の車重量と後方車両の車重量を考慮にして最小の衝撃力で後方車両に追突されかつ前方車両に追突しない場合の加速度を演算する。そして、CPU2は、燃料噴射制御装置15を介して、演算した加速度で自車両を加速制御するようにした。従って、自車両は、後方車両の車種に左右されることなく、最小の衝撃力で追突を吸収することができる。
(もっと読む)
交通システム、車両および交通信号制御機
【課題】右折感応制御を行う交差点に設置された信号機の右折青矢印灯の表示に関する情報を車載機に提供する交通システム等を提供することを目的とする。
【解決手段】右折専用車線に設置された車両感知器3からの車両感知信号に応じて、信号灯器2Aaの右折矢について右折感応制御を実施する交差点において、前記右折矢に関する右折表示情報を車両Cの車載機6に提供する。前記右折表示情報を受け取った車載機6は、前記右折表示情報に基づいて、交通信号制御機1Aによる右折矢の延長等の動作を予測し、前記予測に基づいて車両Cの制御等を行う。車載機6において右折矢の表示がどのタイミングで終了するかを正確に予測することで、右折を予定する車両Cが右折可能か否かを正確に判断することが可能となる。
(もっと読む)
追従制御装置
【課題】 周辺環境に適した車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、車両に搭載されたECU2を備えている。ECU2は、メモリ部13に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定する車間距離設定部15と、前方レーダ9及び後方レーダ10の検出信号に基づいて、自車両と周辺車両との車間距離等を求める周辺車両検出部16と、自車両と周辺車両との車間距離等に基づいて、周辺車両の走行状態に応じた車間距離を求める車間距離設定部17と、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求める目標車間距離設定部18と、目標車間距離に応じて速度を制御する速度制御部20とを有している。
(もっと読む)
車両用追従走行制御装置
【課題】従来のオートクルーズシステム(定速走行)の操作系のまま、低速走行、停止といった条件下でも前車追従走行が可能である車両用追従走行制御装置を提供すること。
【解決手段】自車速検出手段4と、車間距離検出手段6と、走行状況判別手段1と、作動スイッチ検出手段2と、目標車速設定手段3と、目標車間距離設定手段5と、目標加減速度算出手段7と、エンジン出力制御手段8と、車両減速度算出手段9と、ブレーキ圧制御手段10とからなる車両用追従走行制御装置において、自車速が所定車速以上であるときに作動スイッチをONした場合は、作動スイッチをONした時の車速を目標車速とし、自車速が所定車速より小さく且つ前車を検出している場合は、作動スイッチをONした時の車速より大きく且つ作動スイッチをONした時の車速とは無関係な車速を目標車速とする。
(もっと読む)
車両の走行制御装置
【課題】実際の車両の運転を考慮して確実に自動運転可能で既存の走行制御ルートから自然に移行できる走行制御ルートをドライバが任意に編集でき汎用性を大きく向上する。
【解決手段】走行制御ルートを編集する際に実行される編集モードでは、選択したルートAとルートBとが交差していない場合、ルートAからルートBにかけて最接近するノード近傍に接線を追加し、追加ルートCとして設定する。追加ルートCの速度はルートAとルートBの最接近するノード同士の速度の平均を求め取得する。また、ルートA、Bが交差している場合は、追加ルートCの速度を、ルートAとルートBとの交点に最も近いルートA、Bの各ノードに設定された速度の平均を求めて演算し、ルートAからルートBへの乗換カーブの半径を許容遠心力を考慮して演算して、交点から乗換カーブへの垂線の長さを演算し、垂線の長さが閾値以下となるように速度を調整して追加ルートCを設定する。
(もっと読む)
車両用走行制御装置
【課題】ACCシステムの車間設定に対するドライバの嗜好性に応じて制御内容を変更する車両用走行制御装置を提供する。
【解決手段】ACC作動時の車間設定に対するドライバの嗜好性を推定し、推定結果に基づいてACCシステムの制御内容を補正する。車間設定を「短」とする嗜好性が高いと推定される場合は、追従走行シーンにおいてメリハリのある加減速をし、先行車への追いつきシーンにおいて接近してから強い減速をかけるようにし、他車両の割り込みシーンにおいてゆっくり減速するように補正を行う。車間設定を「長」とする嗜好性が高いと推定される場合は、追従シーンにおいて弱めの加減速を行い、先行車への追いつきシーンにおいて早めから減速を開始するとともに最初から強い減速をかけるようにし、他車両の割り込みシーンにおいて早く減速を行うように補正を行う。
(もっと読む)
追従走行装置
【課題】一般ドライバー、特に高齢者や女性ドライバーが、いつでも、どこでも簡単な操作で使用でき、運転負荷を軽減することができる追従走行装置を提供する。
【解決手段】先行車検出手段11と、目標車間距離を設定する目標車間距離設定手段12と、上限車速を設定する上限車速設定手段13と、自車速を検出する車速検出手段14と、ブレーキがドライバーによって操作されたか否かを検出するブレーキ操作検出手段15と、エンジンのスロットルを操作するスロットルアクチュエータ16と、前記各種情報からスロットル開度を制御する走行制御手段17を有し、システムによるブレーキ操作への介入は行わず、システムの制御対象をスロットル制御のみとした構成。
(もっと読む)
141 - 160 / 315
[ Back to top ]