
Fターム[3D244AA04]の内容
Fターム[3D244AA04]に分類される特許
1 - 20 / 123
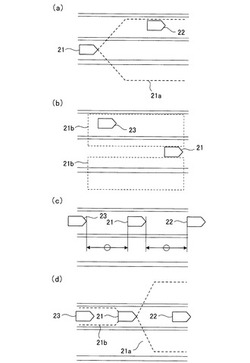
車間距離制御装置
【課題】より安全性の高いACC走行時の車線変更を実現する。
【解決手段】隣接車線を走行する車両の間を目標スペースとして車線変更する際、隣接車線における先行車両22との車間距離と後続車両23との車間距離とが等しくなるよう車速を制御し、車線変更後は、先行車両22との車間距離をACC設定車間距離に戻す際、後続車両23との車間距離が基準車間距離Lbase以下のときは、減速度を限定した上で先行車両22との車間距離がACC設定車間距離Laccとなるような車速を決定することで、より安全性の高いACC走行時の車線変更を実現する。
(もっと読む)
運転支援装置

【課題】設定車速を容易に微調整することができ、短時間で設定車速を設定することができるようにする。
【解決手段】車速を設定車速に維持して走行する定速走行制御手段33と、設定車速を一単位車速ずつ増減調整するための調整手段、調整手段に対する操作を検出し、この操作に基づいて設定車速を設定する設定車速制御手段31と、設定車速制御手段31で設定された設定車速を表示する表示手段14とを備え、設定車速制御手段31が、調整手段への連続的な操作を検出したら設定車速を所定周期で連続的に増減させ、調整手段への連続的な操作を検出しても設定車速が一単位車速よりも大きい所定車速のときは設定車速を所定周期よりも長い所定時間変化させずに保持する。
(もっと読む)
車両用走行制御装置
【課題】 ドライバの加速意図を反映しつつドライバの違和感を抑制することができる車両走行制御装置を提供すること。
【解決手段】 車両がカーブ路を走行する際、カーブ路の曲率に基づいて算出された目標車速V0*となるように車両を加減速制御し、加減速制御中にドライバのアクセルペダル操作が検出されると、検出されたアクセルペダル操作量(アクセル開度AP)に基づいて目標車速V0*を修正するとともに、目標車速V0*により発生する車両の横加速度αyよりも大きい横加速度を許容する許容車速Vuprよりも高くならないように目標車速V*を制限し、目標車速V*の制限中に許容車速Vuprが上昇した場合、アクセルペダルの操作反力Fを発生させると共に、アクセルペダル操作が検出されなくなるまで、加減速制御における車両の加速度を、許容車速Vuprを実現する加速度αy'よりも小さくなるように制限する。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車両制御装置
【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
車両の駆動装置
【課題】車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
(もっと読む)
車両用運転支援装置
【課題】道路上の制限速度が変化した場合のセット車速の変更を、ドライバの意思を尊重しつつ容易に行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4でセット車速Vsetと異なる制限速度Vlimを検出したとき、セット車速Vsetの値を制限速度Vlimに切換可能なスタンバイモードを一時的に実行し、スタンバイモードの実行中はセット車速Vsetと制限速度Vlimとを対比可能に表示するとともに、ドライバの操作状態に応じてセット車速Vsetの維持或いは制限速度Vlimへの切換を選択的に行う。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】道路状況に応じた設定車速を設定する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制する。制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する。
(もっと読む)
車速制御装置
【課題】追従制御中にブレーキ操作が行われた場合に適正に車速を制御する。
【解決手段】車速制御ECUは、運転者によるブレーキ操作を検出する操作検出手段と、前記追従制御手段によって車速が制御されている状態で、前記操作検出手段によってブレーキ操作が検出された場合に、前記距離検出手段によって車間距離が検出されているか否かを判定する第2距離判定手段と、前記第2距離判定手段によって車間距離が検出されていると判定された場合に、前記追従制御手段の最大加速度を前記予め設定された最大加速度未満の値に変更する第4指示手段と、を備える。
(もっと読む)
車両制御装置
【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
車速制御システム
【課題】オートクルーズによる運転をより円滑に行うことが可能となるシステムを提供する。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジン1による駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
車両の運転支援装置
【課題】渋滞時に適切なタイミングで違和感なくハザードランプを点滅させることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、追従走行時の自車速Vが高速側の所定車速に設定された第1の車速V1から、当該第1の車速V1よりも低速側に設定された渋滞判定用の第2の車速V2以下まで減速したとき、B_ECU10を通じてハザードランプ20を点滅させる。これにより、渋滞時に適切なタイミングで違和感なくハザードランプを点滅させることができる。
(もっと読む)
車両制御装置
【課題】先行車と自車との相対的な制動応答特性の差異に関わらず、追従走行制御時に適切に自車を減速させることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて自車1の走行状態を制御する通信追従走行制御ECU40と、先行車100の減速ジャーク情報を取得する先行車走行情報取得部45と、通信追従走行制御ECU40が先行車100の減速に応じて自車1を減速させるタイミングを先行車100の減速ジャーク情報に基づいて変化させる減速度算出部33と、を備える。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
走行制御装置
【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
1 - 20 / 123
[ Back to top ]