
Fターム[3D244AD04]の内容
Fターム[3D244AD04]に分類される特許
1 - 20 / 268
車両の走行制御装置
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
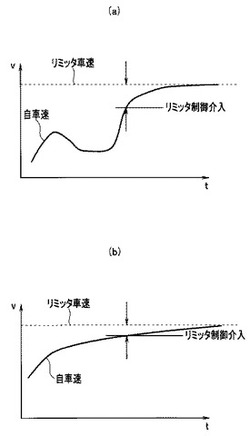
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両の走行制御装置

【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
先行車追従走行制御装置及び先行車追従走行方法
【課題】先行車追従走行中において、渋滞状況以外で並走する側方車両が存在する状況の場合では、運転者によって選定された車間設定方法で設定される目標車間距離に固執せずに、自車両が側方車両の運転手の死角に入らない様に目標車間距離を一時的に柔軟に変更することができる先行車追従走行制御装置及び先行車追従走行方法を提供する。
【解決手段】目標車間距離設定部14で、自車両が渋滞状況にあるときを除いて、周辺車両状況の安全性の高低を左側並走車の有無と右側並走車の有無に基づいて判定すると共に、この判定で安全性が低いと判定された場合に、車間設定選択部13で選択された車間設定方法(i=n)で設定される目標車間距離Dnより長い並走時目標車間距離DLに変更する。
(もっと読む)
走行制御装置
【課題】増速変化地点の手前で、先行車両との流れに合わせて車速を制御する。
【解決手段】走行制御用コントロールユニットは、制限速度の増速変化地点の手前のサイン認識可能区間内に車両Aが進入してからは、自車速度Vcと将来制限速度Vnlとの差に基づいて制駆動力を制御するようにした。それゆえ、車両Aの進行方向に制限速度の増速変化地点が存在する場合には、先行車両Bの制限速度の増速に追従するように車両Aを加速させることができ、先行車両Bと車両Aとの車速差を低減できる。そのため、先行車両Bとの流れに合わせて車両Aの車速を制御できる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
車両の駆動装置
【課題】車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
車両用運転支援装置
【課題】先行車のみならず自車走行路上に存在する信号機に対しても制御対象を拡張して好適な走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4で停止指示信号機が認識されているとき、当該停止指示信号機の停止位置Pstpに自車両1を停止させるための信号機用目標加速度asigを演算し、追従走行用目標加速度acarが演算されていない場合であって信号機用目標加速度asigが演算されている場合には信号機用目標加速度asigを追従走行用目標加速度acarとして代用し、追従走行用目標加速度acar及び信号機用目標加速度asigが演算されている場合であって信号機用目標加速度asigが追従走行用目標加速度acarよりも小値である場合には信号機用目標加速度asigの値を追従走行用目標加速度acarとして代用する。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
車間距離制御装置及び車間距離制御方法
【課題】目標車間距離Lの初期値を大きな値に設定しなくとも、追従走行制御可能な車間距離範囲を大きくすることができ、運転者にとって違和感の低い追従走行制御を可能とする。
【解決手段】自車両MM進行方向に存在する先行車両と自車両MMとの車間距離Lrelが予め設定した制御開始距離以下になったと判定すると追従走行制御を開始して、上記車間距離Lrelが予め設定した目標車間距離Lとなるように自車両MMの制駆動力の制御を行う。そして、設定したアクセル開度初期値AP0に対し、現在のアクセル開度が大きい場合には上記目標車間距離Lを減少補正し、現在のアクセル開度が小さい場合には上記目標車間距離Lを増大補正する。
(もっと読む)
オートクルーズ制御装置
【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
運転支援装置
【課題】渋滞区間の交通流を改善する運転支援装置を提供することを課題とする。
【解決手段】渋滞区間における運転支援を行う運転支援装置であって、渋滞区間の平均速度を取得する平均速度取得手段と、平均速度取得手段で取得した渋滞区間の平均速度より高い速度を渋滞区間における上限速度として設定する上限速度設定手段と、上限速度設定手段で設定した渋滞区間における上限速度に基づいて運転支援(例えば、速度制御、情報提供)を行う運転支援手段とを備えることを特徴とし、渋滞区間において運転支援装置を搭載する車両が走行している割合を取得する走行割合取得手段を備え、上限速度設定手段は、走行割合取得手段で取得した走行割合に応じて上限速度を設定すると好適である。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の運転支援装置
【課題】停止保持制御から追従走行制御への移行を違和感なく実現することができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、停止中にドライバによる操作入力が行われ且つ操作入力から設定時間Tth0が経過するまでの間に先行車との車間距離Lが判定閾値Dthを超えたとき発進を許可する。この場合において、停止中の前記先行車との車間距離Lが大値側に変化したとき車間距離Lの変化に伴って大値側に更新される第1の閾値Dth1と、先行車の車速Vfが高くなるほど大値側に変更される第2の閾値Dth2とを演算し、これらの何れか大きい値に基づいて前記判定閾値Dthを可変設定する。
(もっと読む)
車両制御装置
【課題】駆動源としてエンジンとモータを用いる車両において、先行車に追従走行している時に先行車が加速した場合の燃費を抑制することができる車両制御装置を提供する。
【解決手段】駆動源としてエンジンとモータを用いる車両において、先行車までの距離を検出する車間距離検出手段と、前記先行車との相対速度を検出する相対速度検出手段と、前記相対速度検出手段によって検出された相対速度を微分し、相対加速度を算出する相対加速度算出手段と、自車速度を検出する自車速検出手段と、前記車間距離検出手段と前記相対速度検出手段と前記相対加速度検出手段と前記自車速検出手段によって検知された車間距離、相対速度、相対加速度、自車速度にもとづいて、先行車に追従するために必要な前記モータの出力トルクを算出する出力トルク算出手段と、前記出力トルク算出手段で算出されたトルクを出力するように前記モータを制御する制御手段とを備えた構成とする。
(もっと読む)
1 - 20 / 268
[ Back to top ]