
Fターム[3D244AD16]の内容
Fターム[3D244AD16]の下位に属するFターム
変速比、変速位置 (95)
Fターム[3D244AD16]に分類される特許
1 - 20 / 66
車間距離制御装置
【課題】より安全性の高いACC走行時の車線変更を実現する。
【解決手段】隣接車線を走行する車両の間を目標スペースとして車線変更する際、隣接車線における先行車両22との車間距離と後続車両23との車間距離とが等しくなるよう車速を制御し、車線変更後は、先行車両22との車間距離をACC設定車間距離に戻す際、後続車両23との車間距離が基準車間距離Lbase以下のときは、減速度を限定した上で先行車両22との車間距離がACC設定車間距離Laccとなるような車速を決定することで、より安全性の高いACC走行時の車線変更を実現する。
(もっと読む)
車両用運転支援装置

【課題】道路上の制限速度が変化した場合のセット車速の変更を、ドライバの意思を尊重しつつ容易に行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4でセット車速Vsetと異なる制限速度Vlimを検出したとき、セット車速Vsetの値を制限速度Vlimに切換可能なスタンバイモードを一時的に実行し、スタンバイモードの実行中はセット車速Vsetと制限速度Vlimとを対比可能に表示するとともに、ドライバの操作状態に応じてセット車速Vsetの維持或いは制限速度Vlimへの切換を選択的に行う。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両の運転支援装置
【課題】渋滞時に適切なタイミングで違和感なくハザードランプを点滅させることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、追従走行時の自車速Vが高速側の所定車速に設定された第1の車速V1から、当該第1の車速V1よりも低速側に設定された渋滞判定用の第2の車速V2以下まで減速したとき、B_ECU10を通じてハザードランプ20を点滅させる。これにより、渋滞時に適切なタイミングで違和感なくハザードランプを点滅させることができる。
(もっと読む)
車両用走行制御装置
【課題】自動変速モードを選択したオートクルーズ制御中に手動変速モードへの切換が指令されたときに、それに応じて変速制御モードの切換とオートクルーズ制御の作動状態とを適切に連係でき、もって運転者の意志を反映した適切な車両の走行を実現できる車両用走行制御装置を提供する。
【解決手段】オートクルーズ制御中に手動変速レンジ(A/Mレンジ、+−レンジ)への切換操作がなされたとき(S24がYes)、運転者の加減速要求であると見なし、オートクルーズを解除して手動変速モードを選択することで任意の手動変速を可能とし(S26,28)、一方、オートクルーズ制御中にNレンジへの切換操作がなされたときには誤操作と見なし(S24がNo)、オートクルーズを解除して自動変速モードを選択し不適切な変速を防止する(S14,16)。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
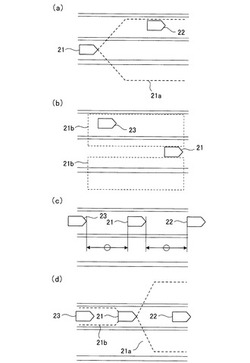
車両走行制御装置
【課題】先行車両の状況に応じた適正な追従制御を実行することができる車両走行制御装置を提供することを目的とする。
【解決手段】少なくとも自車両21の走行方向の前方を走行する先行車両22と当該先行車両22の走行方向の前方を走行する先々行車両23とを含む先行車両群25の平均の速度Vavと、自車両21と先行車両22との車間距離Drとに基づいて、自車両21を先行車両22に追従させる追従制御を実行することを特徴とする。したがって、先行車両22の状況に応じた適正な追従制御を実行することができる車両走行制御装置を提供することができる。
(もっと読む)
油圧無段変速機付き自走式車両
【課題】所望の位置でアクセルを保持することのできるクルーズコントロール機構を備える油圧無段変速機付き自走式車両を提供する。
【解決手段】HST(油圧無段変速機)1と、回動させることによってHST1の変速操作をする前進アクセルペダル(変速操作部材)28と、前進アクセルペダル28の回動位置を保持するクルーズコントロール機構30とを有するHST付きトラクタ(自走式車両)21において、クルーズコントロール機構30が摩擦部材30hを備え、摩擦部材30hによって前進アクセルペダル28の回動位置を保持する。
(もっと読む)
トラクタ
【課題】本発明では、作業中のエンジン回転数を負荷変動に応じて素早く最適燃費ラインの回転数に近づけるようにすることで、燃料消費量が少ないトラクタの走行制御装置を提供することを課題とする。
【解決手段】アクセルレバー33或はアクセルペダル34の開閉度合いを検出するスロットルセンサ20と、エンジン2の出力軸の回転数を検出するエンジン回転センサ22を設けると共に、前記スロットルセンサ20の検出開度に応じた最適回転数を制御装置40に記憶し、前記エンジン回転センサ22が検出するエンジン回転数とスロットルセンサ20の検出開度に応じた最適回転数の差を所定範囲に収めるように、エンジン回転制御部27と主変速制御部28とPTO変速制御部29を制御するように構成したことを特徴とするトラクタの構成とする。
(もっと読む)
車間距離制御装置
【課題】先行車をロストした場合においても、ドライバにとって違和感の少ない適切な制御を行う。
【解決手段】制御継続判定部13でロスト判定部11のロスト判定結果とノーズダイブ判定部12のノーズダイブ判定結果とからACC制御を継続するか否かを判定する。低速時に先行車をロストしたと判定され、且つ自車の減速度が閾値以上でブレーキ作動が設定時間以上継続してノーズダイブしていると判定されたときには、ACC制御の継続を指示し、先行車をロストしたと判定されても、自車がノーズダイブしていないと判定された場合には、ACC制御を解除する。ACC制御を継続する場合、制御継続部14で先行車のロスト時の車間距離と車速とから現在の車間距離を推定し、推定した車間距離に基づいてACC制御を継続する。これにより、先行車をロストした場合においても、ドライバにとって違和感の少ない適切な制御とすることができる。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車速制限制御装置
【課題】制限車速の変化速度決定処理が走行抵抗による影響を受けることなく、制限車速変更操作に対する再現性が確保され得るようにした車速制限制御装置を提案する。
【解決手段】t1から「SET」スイッチの短時間操作を6回繰り返したことにより、制限車速指令値tLmtVSPが変更前制限車速指令値tLmtVSP (0)からPitch=「1Km/h」の小ピッチずつ6回上昇された場合の制限車速LmtVSPの変更速度を以下のように決定する。現在の制限車速指令値tLmtVSPおよび変更前制限車速指令値tLmtVSP(0)間の制限車速指令値段差ΔtLmtVSPが設定値ΔtLmtVSP(2)に到達するt2までは、制限車速LmtVSPの時間変化割合を小さなγにし、t2以降は、ΔtLmtVSP≧ΔtLmtVSP(2)であるから、LmtVSPの時間変化割合を大きなβにし、制限車速LmtVSPを実線図示のごとき速度(γ,β)制御下で変更後制限車速指令値tLmtVSP に至らしめる。
(もっと読む)
自動走行解除装置
【課題】自動走行の解除時であっても運転者の加速意思を車両挙動に適切に反映させる。
【解決手段】自動走行解除装置10は、自動走行可能な車両に搭載され、自動走行の実行が設定された場合にフットレスト位置Prでのアクセルペダル反力を、フットレスト解除ペダル反力特性に応じたペダル反力より増大させ、アクセルペダルのペダルストローク位置がフットレスト位置Prから戻されたときに自動走行の実行を解除してフットレスト位置Prでのペダル反力をフットレスト解除ペダル反力特性に応じたペダル反力に戻し、この後、第1所定時間以内にアクセルペダルの再踏み込みによる運転者の加速意思を検出したときには、アクセルペダルのペダルストローク位置がフットレスト位置Prから戻されたときに解除された自動走行の実行時に駆動トルク特性として設定されていた自動走行時駆動トルク特性を、駆動トルク特性として再設定する。
(もっと読む)
ペダル反力制御装置
【課題】車両の自動走行時の走行状態に応じて運転者の加速意思を車両の走行挙動に適切に反映させる。
【解決手段】運転者によるアクセル操作を必要とせずに、先行車両に追従する追従走行または目標速度での定速走行による自動走行可能な車両に搭載され、車両の自動走行時にアクセルペダルのフットレスト位置においてペダル反力を増大させるペダル反力制御装置10は、自動走行として追従走行が設定されたときに、フットレスト位置に第1位置を設定すると共にフットレスト位置でのペダル反力に第1反力を設定し、自動走行として定速走行が設定されたときに、フットレスト位置に第1位置よりも浅い第2位置を設定すると共にフットレスト位置でのペダル反力に第1反力よりも小さな第2反力を設定する。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
車両用運転支援装置
【課題】自車走行路以外の状況についても十分に考慮し、ドライバのフィーリングにあった好適な車速で走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット6は、画像認識装置5で認識した車外情報に基づいて、自車走行路に隣接する隣車線の渋滞状況を判定し、隣車線が渋滞していると判定した場合には、ACC制御の目標車速Vtrgtを予め設定された渋滞時用の低車速に変更する。これにより、隣車線渋滞時の自車1の無駄な加速、高い速度での走行がなくなり、ドライバに安心感を持たせることができる。しかも、隣車線渋滞時には低速で走行することにより、隣車線からの急な割り込み車両や万一の歩行者の飛び出し等に対しても十分な対処時間を確保することができる。
(もっと読む)
1 - 20 / 66
[ Back to top ]