
Fターム[3D246GC14]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 運転者による制動時 (534)
Fターム[3D246GC14]に分類される特許
521 - 534 / 534
自動車用の電気油圧式ブレーキシステム
本発明は、「ブレーキバイワイヤ」タイプの自動車用電気油圧式ブレーキシステムに関する。このブレーキシステムは、特に、マスタブレーキシリンダと協動するストロークシミュレータと、油圧ポンプおよび高圧アキュムレータから構成される圧力源とを含む。ブレーキシステムの電気油圧系構成部品の故障時に、運転者の筋力によるマスタシリンダ内の所定の圧力よりも高いブレーキ圧力による車両の減速を可能にするため、本発明によって、車両の車輪ブレーキ(7、8、11、12)と圧力源(それぞれ20および21)との間の接続ラインに、マスタブレーキシリンダ(2)が供給する圧力によって油圧作動させることが可能であり、かつ、外部の力によっても作動させることが可能なバルブ機構(13)を配置することが提案される。  (もっと読む)
(もっと読む)
二重測定スケールおよび高フルスケール値を有する集積化圧力センサ
二重測定スケールを有する圧力センサ(15)において、半導体材料のモノリシック体(16)は、第1主表面(16a)、バルク領域(17)、および圧力(P)が作用する感知部分(33)を有し、キャビティ(18)を、モノリシック体(16)に形成し、かつ可撓性を有して圧力(P)に応じて変形可能な薄膜(19)によって第1主表面(16a)から分離し、また感知部分(33)の内側に配置し、バルク領域(17)によって包囲し、圧力(P)の第1の値を感知可能な圧電抵抗型の低圧検出素子(28)を、薄膜(19)に集積化し、この低圧検出素子(28)は薄膜(19)の変形の関数として可変抵抗を有するものとする。さらに、同様に圧電抵抗型の高圧検出素子(29)を、感知部分(33)の内側のバルク領域(17)に形成し、この高圧検出素子(29)は圧力(P)の関数として可変抵抗を有する。高圧検出素子(29)は圧力(P)の第2の値を感知可能とする。  (もっと読む)
(もっと読む)
モータ化単線車両の駆動動的制御方法と駆動動的制御器
【課題】
前輪或いは後輪の浮上りのような臨界状況を確実に検出して制御するか、或いはカメラによってコーナリング中にブレーキをかけるモータ化単線車両の駆動動的制御方法と駆動動的制御器を提供すること。
【解決手段】
この発明は、車道に対する車両の傾斜角度(ρ)及び縦揺れ角度又はそのいずれか一方を考慮して記録されたカメラ画像シ−ケンスを評価するモータ化単線車両の駆動動的制御方法に関する。電気油圧式或いは電気機械式ブレーキ制御ユニットの制御閾値は、検知された傾斜角度(ρ)及びピッチ角度又はそのいずれか一方に依存して適合されている。
この発明は、電子制御部と駆動動的制御プログラム用メモリーを備える電気油圧式或いは電気機械式ブレーキ制御ユニットと、駆動動的制御器を備える画像シーケンス評価装置とから成り、この評価装置はさらに、標準ABS/TCS制御器(60)と、縦揺れ角度や縦揺れ速度を見積る第一ブロック(72)と、傾斜角度を見積る第二ブロック(73)と、制御閾値を算出する危機コンピュータ(80)とから成る。 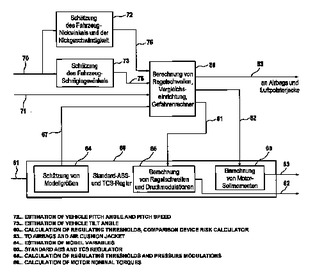 (もっと読む)
(もっと読む)
自動車の走行機能を制御するための方法
本発明は、所定の走行状態を示すセンサ信号を利用してそこから走行指示あるいはそれに類する物を生成するという制御装置を用いて、自動車の走行機能を制御するための方法、に関する。この走行指示は、車両の運転者に向けられてもよいし、制御指令として関連するユニットに直接送られてもよい。道路に勾配があって車両に傾斜が生じると、運転に有意な影響が生じる。本発明では、水平に対する車両の傾きが少なくとも1つの傾斜センサを用いて検知され、当該傾斜センサの信号が前記制御装置に入力され、傾斜が関わる走行状況における走行指示あるいはそれに類する物を生成するために使用される。縦方向の傾斜と横方向の傾斜との二つが検知されて評価されることが好ましい。 (もっと読む)
リバーシブルシートベルトプリテンショナを制御する方法及び装置
本発明は、車両のリバーシブルベルトプリテンショナ(1)を制御するための方法であって、アクセルペダル(4)及びブレーキ(2)に関する特性変数(K1〜K4)が、アクセルペダル(4)の解放及び引き続くブレーキ(2)の操作の形態で、危機的状況に対する運転者の反応に関して決定及び監視され、危機的状況に対する運転者の反応を特定した際に、プリベルトテンショナ(1)が作動される方法に関する。 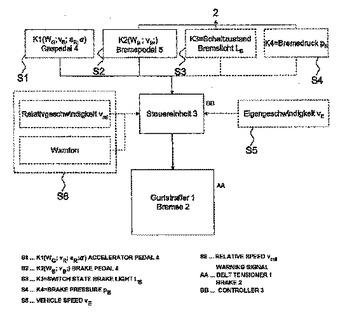 (もっと読む)
(もっと読む)
自己倍力構造形式のディスクブレーキ及び自己倍力式のブレーキのための制御方法
本発明は、自己倍力構造形式のディスクブレーキであって、ブレーキディスク(2)の片側における少なくとも1つのブレーキパッドユニット(20)を緊締作動もしくは圧着させる圧着ユニットが設けられており、ブレーキディスク(2)へのブレーキパッドユニット(20)の圧着運動が、ブレーキディスク軸線(BA)に対して平行に延びる少なくとも1つの運動成分とブレーキディスク軸線(BA)に対して接線方向に延びる少なくとも1つの運動成分(方向U)とに分解可能であり、圧着ユニットを操作するためのアクチュエータとして、少なくとも1つの電気モータ式の駆動装置(23)が設けられている形式のものに関する。このような形式のディスクブレーキにおいて、本発明の構成では、ブレーキパッドユニットに向けられた側における少なくとも2つ又はそれ以上のブレーキプランジャ(5,6)の押圧面がそれぞれ、ランプ形状の輪郭を備えた切欠き(14)を有しており、該切欠き(14)に各1つの転動体(16)が係合していて、該転動体(16)が、一方の側でブレーキプランジャ(5,6)の押圧面のランプ形状の輪郭に支持され、かつ他方の側でブレーキパッドユニットに支持されている。本発明はさらに、自己倍力式のブレーキを制御する方法に関する。  (もっと読む)
(もっと読む)
モーターサイクルブレーキシステム
【課題】
【解決手段】本発明は、前輪ブレーキ回路(4)へと導入されるマスターブレーキシリンダーの圧力の二重測定のための適切な手段(3)が設けられている液圧モーターサイクルブレーキシステムに関する。
(もっと読む)
動力付き車両用ブレーキシステム

【解決手段】 本発明は、自動車のブレーキシステムに関し、システムは主ブレーキシリンダ(20)をアンチロック装置(16)により、車両の車輪に取り付けられるブレーキ装置(12)に接続する2つの独立ライン回路(14、18)と共に設けられる流体動作ブレーキと、パーキングブレーキとを備える。本発明によれば、補助シリンダ(26)は、アンチロック装置(16)と主ブレーキシリンダ(20)との間の少なくとも1つのライン回路(18)に配設され、作動装置(48)により変位され、ライン回路内の液柱という手段により移動するあいだブレーキ装置(12)に作用する補助ピストン(32)、及び主ブレーキシリンダ(20)とそれぞれのブレーキ装置(12)との間のライン接続を閉鎖するためのバルブ(42)を備える。 (もっと読む)
車両ブレーキシステムの駆動ユニットに圧力を供給するための装置及びこの装置を制御するための方法
【課題】常用ブレーキ機能の信頼性を可能な限り高く保持し、特に電子又は電気回路システムのエラー又は故障について最大限可能な冗長性を得る。
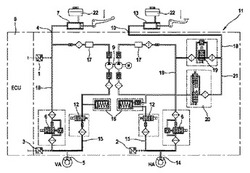
【解決手段】本発明は、ポンプ6及びポンプ6を駆動するモータ7を有する空気モータポンプ組体3を具備し、モータポンプ組体3は、駆動ユニットの空気ブレーキブースター1内の圧力レベルあるいは圧力差に応じて電子制御ユニット10,12によって制御され、ブレーキブースター1のチャンバ内の圧力レベルあるいは2つのチャンバ間の圧力差がセンサ9によって検知される、車両ブレーキシステム、特に「ブレーキバイワイヤ」タイプの車両ブレーキシステムの駆動ユニットに圧力を供給するための装置に関する。
本発明により、モータポンプ組体3を制御するために用いられる制御ユニット10,12は論理モジュールと電力モジュールとを有し、論理モジュールと電力モジュールとは互いに独立して配置されている、ことが開示される。
(もっと読む)
自動車油圧ブレーキ装置の低圧蓄圧器の予充填方法および自動車ブレーキ装置
本発明は、切換弁(8)と、油圧ポンプ(9)と、出口弁(13)と、および油圧ポンプ(9)の吸込配管(6)内に配置されている低圧蓄圧器(14)とを含む自動車ブレーキ装置(17)の低圧蓄圧器(14)の予充填方法に関するものである。低圧蓄圧器(14)は、足踏みブレーキ・ペダル(1)の操作がセンサによりモニタリングされ、および操作が行われたとき、車輪ブレーキ(11)に作用しているブレーキ圧力を閉じ込めるために切換弁(8)が閉鎖され、およびブレーキ圧力を低圧蓄圧器(14)内に放出させるために出口弁(13)の少なくとも1つが開放されるとき、特に簡単に且つ騒音なしに予充填可能である。 (もっと読む)
自動車両用のブレーキシステムおよび制動方法
本発明は自動車用のブレーキシステムおよび制動方法に関する。本発明においては自動車用のブレーキシステムが、摩擦ブレーキとして構成されるホイールブレーキ(21、23、25、27)用のブレーキ操作装置を少なくとも有している。ブレーキシステムは、所定の低い走行速度以上での走行状態から停止状態へ、ないしは停止状態から所定の低い走行速度での走行状態へ、ブレーキをかけながら移行する際に、前記各ホイールブレーキを互いに時間をずらして作動させるか、またはこれらに互いに時間をずらして増大する作動力を作用させる、ないしは、前記各ホイールブレーキを互いに時間をずらして緩めるか、またはこれらに互いに時間をずらして低下する作動力を作用させるコントローラ(31)が備えられることを特徴とする。 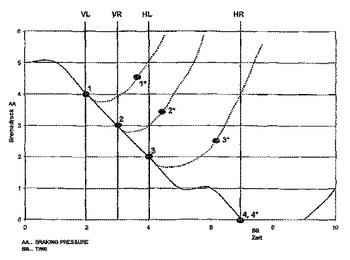 (もっと読む)
(もっと読む)
自動車両用のエアバッグ作動電子系
エアバッグシステム、実際の運転状態の検知を可能とする第1センサモジュールを有するセンサ装置、衝突事故の事態でエアバッグシステムを作動し且つセンサ装置によってもたらされるセンサ信号を評価するために設けられている電子系を備えて成る車両。電子系は、検知された実際の運転状態を、衝突事故の事態を示す所定の危険走行状態と比較する。センサ装置は、或る時間が過ぎると危険な実際の走行状態となり得る車両の周辺条件を前もって検知する第2センサモジュールを有する。第2センサモジュールによって予めその差し迫った発生が示された危険な実際の走行状態は、電子系によって、衝突事故のない走行状態と認定される。 (もっと読む)
車両を安定させるための装置及び方法
本発明は車両の横方向の運動を表す、横方向の運動変数の実際値を決定するために備えられた検出装置(10)を含み、横方向の運動変数のための目標値を決定し、横方向の運動の目標値が決定されたしきい値を超えた場合に、所定の安定条件に従って該決定されたしきい値を定義する評価ユニット(11)を含む、車両を安定させるための装置及び方法に関する。該評価ユニット(11)は決定された実際値と、横方向の運動変数に対する決定され場合によっては制限される目標値との比較に応じて、車両の運転安定性が増加するような方法で、車両の長手方向及び/又は横方向の運動に影響を与えるために設けられた車両のユニット(12)を作動させる。横方向の運動変数は車両の傾き角を表す傾き角変数、及び/又は車両の車輪に生じるスリップ角を表すスリップ角変数を有する。  (もっと読む)
(もっと読む)
車両における乗員保護手段の制御方法及び乗員保護システム
本発明は車両における乗員保護システム、及び乗員保護手段(2)の制御方法に関する。前記システムによれば、障害物への距離が検出され、衝突を避けるために必要なブレーキ減速度が決定され、該決定されたブレーキ減速度に基づき、所定の事象が発生しているかどうかが定められ、もし前記事象が発生している場合は、乗員保護手段(2)がそれ自体を始動させるため、又はそれ自体が始動されるべく動作するために制御される。車両のドライバがブレーキ操作を開始するためにブレーキ操作要素を操作した場合にのみ、必要なブレーキ減速度が決定され、又は決定された必要なブレーキ減速度が所定の事象の発生に関して評価される。 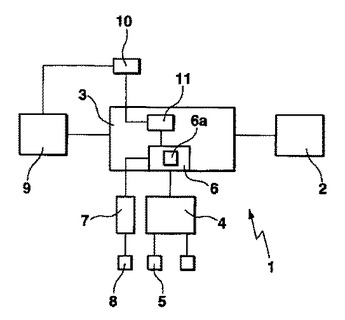 (もっと読む)
(もっと読む)
521 - 534 / 534
[ Back to top ]