
Fターム[3D246HA26]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | エンジン状態 (308)
Fターム[3D246HA26]に分類される特許
141 - 160 / 308
車両制御装置および車両制御方法
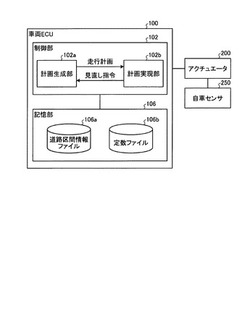
【課題】より適切なタイミングで走行計画を見直すことができ、これにより、さらに的確な走行計画を効率的に生成することができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明の車両制御装置および車両制御方法は、車両が走行する走行計画を生成し、生成された走行計画に基づきアクチュエータを制御追従することにより、車両を走行制御する計画実現し、計画実現において、アクチュエータの制御追従が走行計画に対して不足する状況を予測した場合、当該走行計画の見直し指令を出力する。
(もっと読む)
制動力制御装置

【課題】制動力の制御の精度を向上させることができる制動力制御装置を提供する。
【解決手段】車両に作用させる制動力を制御する制動力制御装置であって、車両に作用させる駆動力Fdriveを取得する駆動力取得手段と、駆動力取得手段により取得された駆動力Fdriveに基づいて制動力を推定する制動力推定手段とを備えることで、駆動力Fdriveと制動力との釣り合い点を意図的に生成することができるので、ブレーキアクチュエータの製造ばらつきや経年劣化等を含めた正確な制動力を推定することが可能となる。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感となる不必要な予圧制御(予備制御)を抑制する。
【解決手段】
車輪の制動トルクを制御する制動手段と、車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度取得手段の取得する操舵角速度に基づいて基準横加速度を決定する決定手段と、車両の実横加速度を取得する実横加速度取得手段とを備える。決定手段は、操舵角速度が大きいほど基準横加速度を小さい値に決定し、或いは、操舵角速度が小さいほど基準横加速度を大きい値に決定する。実横加速度取得手段が取得する実横加速度が基準横加速度を超えたときに、制動手段を介して車輪への制動トルク付与を開始する。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感を抑制できる予備制御により、ブレーキアクチュエータの応答性を補償し、確実な車両安定性制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、車両のヨー角加速度を取得するヨー角加速度取得手段とを備え、操舵角速度dSaの大きさが第1所定値より大きく、且つ、ヨー角加速度の大きさが第2所定値よりも大きいときに、車輪に制動トルクの付与を行う。
(もっと読む)
ブレーキ装置
【課題】 ブレーキ装置において、バキュームブースタの負圧−助勢限界マスタシリンダ圧特性にバラツキがあっても、その特性に相当する負圧−助勢限界マスタシリンダ圧マップを適正に補正することで、特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させる。
【解決手段】ブレーキ装置のブレーキECU26は、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する補正手段を備えている。
(もっと読む)
車両制御装置
【課題】車両の停止状態において制動力を車輪に作用させる車両制御装置において、エンジンを自動停止させる機会を更に増やす。
【解決手段】車両制御装置は、車両が走行状態であっても、エンジン10の運転中に所定の停止条件が成立した場合にエンジン10を自動停止させるとともに、所定の再始動条件が成立した場合にエンジン10を再始動させる。車両制御装置は、車速センサ35及びECU30により検出される検出車速が0である場合に、運転者のブレーキ操作に基づいて車輪27に作用させられる制動力よりも大きい所定の制動力を、ブレーキアクチュエータ28により車輪27に作用させる。車両の実速度が0となる付近で検出車速が0となる不感帯が存在している。車両制御装置は、エンジン10の自動停止に伴い検出車速が0まで低下した時に、ブレーキアクチュエータ28により所定の制動力よりも小さい制動力を車輪27に作用させるECU30を備えている。
(もっと読む)
車両の制動制御装置
【課題】エンジンの自動停止中は車両を確実に停止させながら、エンジンの自動再始動後は車両の発進性および加速性を向上させることが出来るようにする。
【解決手段】エンジン11を自動停止および自動再始動させるアイドル制御手段42と、車両10の駆動輪13のトルクTRQwhlを演算する駆動輪トルク演算手段51と、エンジン11が自動停止中にブレーキ装置27,28を作動させ車輪13に制動トルクTRQbrkを加える自動ブレーキ手段52と、車輪13の制動トルクTRQbrkの大きさを設定する制動トルク設定手段53と、エンジン11が自動再始動すると、車輪13に加えられた制動トルクTRQbrkを所定の緩和速度Vbrkで緩和させる制動トルク緩和手段55と、駆動輪トルクTRQwhlに応じて緩和速度Vbrkを変更する緩和速度変更手段56とを有するように構成する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】 運転者の意図する旋回挙動を実現できる車両挙動制御装置および車両挙動制御方法を提供する。
【解決手段】 車両の左右後輪に対して左右独立に駆動力を付与可能な駆動力配分制御装置と、各輪に対し独立して制動力を付与可能なブレーキ制御装置と、車両挙動(ヨーレイト)を検出する目標ヨーレイト算出部307と、検出された車両挙動に基づいて車両のアンダーステアとオーバーステアを判断する車両挙動状態判断部310と、車両挙動状態判断部310の判断結果に応じて駆動力を増加し、駆動力配分制御装置を制御する駆動力制御部(駆動力配分算出部311,目標エンジントルク算出部313)およびブレーキ制御装置を制御する目標制動力算出部312と、を備えた。
(もっと読む)
車両の制振制御装置
【課題】 車両の制振制御等に於いて、参照される車輪トルクを推定する際にその推定が良好に実行できない事情を考慮して制御を実行すること。
【解決手段】 本発明の車両の駆動力を制御することにより車両のピッチ又はバウンス振動を抑制する制振制御装置は、車輪と路面との接地個所に於いて発生する車輪に作用する車輪トルク推定値を取得する車輪トルク推定値取得部と、車輪トルク推定値に基づいてピッチ又はバウンス振動振幅を抑制するよう車両の駆動力を制御する駆動力制御部とを含み、更に、車輪のスリップ状態を示す車輪スリップ状態量の表すスリップの程度が所定の程度より大きいとき又は車両が後退しているときには車輪トルク推定値に基づく駆動力の制御を中止することを特徴とする。
(もっと読む)
電動車両の制振制御装置
【課題】車両重量や走行抵抗の変動に起因する定常的な外乱により生じる不要な加速度変動を抑制する。
【解決手段】動力源にモータ/ジェネレータを有するFRハイブリッド車両において、駆動トルクからモータ回転速度を推定するモータ回転速度推定部102aと、モータ回転速度を検出するレゾルバと、モータ回転速度推定値ωm#とモータ回転速度検出値ωmの偏差ω_errから外乱を推定する外乱推定部102cと、車両の振動成分を抽出して振動を抑制するための第2トルク目標値Tm*2を算出する第2トルク目標値演算手段102と、モータ回転速度擬似値ωm_susを算出する擬似モータ回転速度演算部102dと、を備える。そして、外乱推定部102cは、制振制御を開始する前の制振制御停止中、モータ回転速度検出値ωmに代え、モータ回転速度検出値擬似値ωm_susを用いて外乱を推定する。
(もっと読む)
車両用走行制御装置
【課題】変速機のフローティング状態において発生する歯打ち音を抑制する車両の走行制御装置を提供する。
【解決手段】手動変速機16のギヤ対46のギヤ間で歯打ち音が発生するフローティング状態であるか否かを判定するフローティング判定手段76と、上記フローティング状態であると判定された場合にスロットル弁開度θTHを所定量増加させるスロットル制御手段78と、上記スロットル弁開度θTHの増加に伴って上昇する駆動トルク増加分を相殺する引きずりトルクTBをホイールブレーキ54により発生させる制動トルク制御手段80とを含むことから、フローティング状態が判定されるとエンジン12からギヤ対46に伝達される駆動トルクが増加されてフローティング状態が速やかに回避されるので、手動変速機16のフローティング状態において発生する歯打ち音を抑制することができる。
(もっと読む)
駆動力制御装置
【課題】車両前方の路面の路面摩擦係数μが低い場合であっても要求減速度(目標減速度)を達成することのできる駆動力制御装置を提供する。
【解決手段】所定距離前方の路面で車両Veに要求される減速度を算出する要求減速度算出手段と、車両Veの現在車速Vpと所定距離前方の路面の路面摩擦係数μとに基づいて、所定距離前方で出力可能な最大減速度を算出する最大減速度算出手段と、最大減速度算出手段によって算出された最大減速度が、所定距離前方の路面で車両Veに要求される減速度よりも小さい場合に、その不足する減速度を車両Veが現在走行している路面で補償する補償手段とを備えている。したがって、所定距離前方の路面において減速度が不足する場合に、車両Veが現在走行している路面でその不足する減速度を補償するから、所定距離前方で目標とする車速Vrに到達させることができる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
車両の走行制御装置
【課題】乗員のブレーキペダルの操作に応じて作動するフットブレーキ装置と、該操作とは独立に作動するEPB装置と、該操作とは独立に作動する加圧ユニットを含むSCS装置と、エンジン自動停止/再始動制御を実行するECUとを備えた、車両の走行制御装置において、省エネ性の向上を図りつつ、車輪の制動力不足に起因する車両の不安定挙動(意図しない進退動等)を防止する。
【解決手段】ECUによって、エンジン自動停止中は省エネ性の高いEPB装置による車輪制動を維持するとともに、該エンジン自動停止後のエンジン再始動時における制動力不足を回避するために、エンジン再始動前に、作動レスポンスの高いSCS装置をブレーキ装置として作動させる一方、作動レスポンスに劣るEPB装置の制動解除動作を開始させるようにした。
(もっと読む)
車両の制動装置
【課題】車両の衝突を検出する衝突センサと、電動モータにより駆動される電動ブレーキ機構を作動させて車輪制動を行う電動パーキングブレーキ装置と、衝突センサからの信号を基に、電動パーキングブレーキ装置の作動を制御するECUと、を備えた車両の制動装置において、車両が停車中に対象物と衝突した場合における該車両の2次衝突の防止と車室内の乗員保護との両立を図ろうとすることにある。
【解決手段】上記対象物と車両との距離を検出するためのレーザセンサを設けておき、ECUにおいて、該レーザセンサからの信号を基に、該車両に対象物が衝突すると予測したときには、EPB装置の車輪制動力を増加させ、その後に、上記衝突センサにより衝突が検出された後は、EPB装置の車輪制動力を該衝突時の衝撃加速度の大小応じて制御するようにした。
(もっと読む)
車両用ブレーキ装置の制御装置
【課題】マスタシリンダ圧に加圧されるポンプアップ圧を発生させるポンプの容量を抑制しつつ、急減速の要求に対応できる車両用ブレーキ装置の制御装置を提供する。
【解決手段】マスタバックの倍力限界点までは、マスタシリンダ圧をホイールシリンダに供給し、前記倍力限界点以降は、ポンプによって発生させたポンプアップ圧のホイールシリンダに対する供給を制御することで、目標のホイールシリンダ圧が得られるようにする。ここで、非制動要求時で、マスタバックの負圧室の負圧が所定の負圧に達しておらず、前記倍力限界点が低下する条件の場合には、ポンプを駆動させて予めポンプアップ圧を発生させておくことで、ポンプ容量が比較的小さくても、倍力限界点以降においてポンプアップ圧による昇圧を応答良く行えるようにする。
(もっと読む)
フロントエンジン・フロントドライブ車両用駆動制御装置
【課題】差動装置の複雑化、大型化及び重量増加を回避することを可能とし、車両の旋回特性を的確に制御することを可能としたフロントエンジン・フロントドライブ車両用駆動制御装置を提供する。
【解決手段】ブレーキ装置19,20により左右後輪17,18側の旋回内輪に伝達される駆動力を減少させ、リアデフ16により左右後輪17,18の旋回外輪に伝達される駆動力を旋回内輪の駆動力が減少した分に応じて増大させるように制御する。車両の回頭側に有効なヨーモーメントを的確に発生させ、オーバーステアを抑制する。
(もっと読む)
情報提供装置及び情報提供方法
【課題】ユーザの運転操作による制駆動力の余裕度合いを提示する。
【解決手段】車両情報を取得する車両情報取得機能Aと、車両情報に基づいて、車両の制駆動力を算出する制駆動力算出機能Bと、車両情報に基づいて、制駆動力との対比において基準となる基準制駆動力を算出する基準制駆動力算出機能Cと、基準制駆動力に対する制駆動力の余裕度を求める余裕度導出機能Dと、算出された余裕度を提示する提示制御機能Eとを実行させる制御装置10を備える。
(もっと読む)
制動装置
【課題】停車維持制御時の違和感を抑制できる制動装置を提供すること。
【解決手段】停車維持制御を行う場合には、油圧制御部78は、ポンプモータ34を駆動させてから一定時間が経過した後、マスタカット弁31でマスタシリンダ11の方向へのブレーキフルードの流れを低減させている。これにより、ポンプモータ34での油圧の増圧時に、ブレーキフルードの流れが安定する前にマスタシリンダ11の方向へのブレーキフルードの流れを低減させた場合に、供給経路26を流れるブレーキフルードがポンプモータ34の吸引力によってリターン経路25に流れることにより、マスタシリンダ11内の油圧が低下することを抑制できる。従って、マスタシリンダ11内の油圧が低下することに起因して、ブレーキペダル5がマスタシリンダ11の方向に吸い込まれるような感覚になることを抑制できる。この結果、停車維持制御時の違和感を抑制することができる。
(もっと読む)
車両用駆動制御装置
【課題】差動装置の複雑化、大型化及び重量増加を回避することを可能とし、車両の旋回特性を的確に制御することを可能とした車両用駆動制御装置を提供する。
【解決手段】リアLSD16は、ドライブ側のトルクバイアスレシオをコースト側のトルクバイアスレシオよりも大きく設定している。車両の旋回走行状態に応じて、左右車輪17,18の旋回内輪に伝達される駆動力を減少させるようにブレーキ装置19,20を制御し、リアLSD16により左右車輪17,18の旋回外輪に伝達される駆動力をドライブ側のトルクバイアスレシオに応じて増大させるように電子制御カップリング13を制御する。
(もっと読む)
141 - 160 / 308
[ Back to top ]