
Fターム[3D246HA26]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | エンジン状態 (308)
Fターム[3D246HA26]に分類される特許
161 - 180 / 308
ハイブリッド車両の回生制動力制御装置及び回生制動力制御方法
【課題】シャシダイナモ装置を用いた、FR−HEV車両に対する二輪駆動状態の燃費測定時に、回生制動により発電する電力の減少を抑制することが可能な、ハイブリッド車両の回生制動力制御装置及び回生制動力制御方法を提供する。
【解決手段】後輪のみを駆動輪とした二輪駆動状態のハイブリッド車両が、シャシダイナモ装置上で、後輪の回転のみで走行すると判定すると、前輪及び後輪を駆動輪とした四輪回転状態において運転者が要求する制動力に応じてモータが発生する回生制動力よりも、運転者が要求する制動力に応じてモータが発生する回生制動力の減少度合いを減少させる。
(もっと読む)
車両の制駆動制御装置及び制駆動制御方法

【課題】変速の有無に関係なく、応答良く車両を減速出来る車両の制動制御を課題とする。
【解決手段】変速機ATがコーストフリーの変速段の状態でアクセルオフを検出すると、変速の有無に関係無く、車両減速のための制動を制動装置BRKを介して車輪に付与する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジントルクを精度良く推定することができるハイブリッド車両の制御装置を提供すること。
【解決手段】ハイブリッド車両100は、エンジン10と、エンジン10と連結されるモータジェネレータ30,40との間に配置され、かつエンジン10からのエンジントルクが伝達されるダンパ機構20を備える。ハイブリッド車両の制御装置(ハイブリッドECU1、エンジンECU2、モータECU3、バッテリECU4、ブレーキECU5)は、エンジン10の回転角速度と、ダンパ機構20に連結される入力軸(クランクシャフト11)の入力回転角度θinおよび出力軸(インプットシャフト51)の出力回転角度θoutに基づいたダンパ捩れ角度Δθとに基づいて算出されるエンジントルクTeに基づいて制動力制御を変更する。
(もっと読む)
車両のアイドルストップスタート制御装置
【課題】燃費改善を維持しつつ、始動時と走行時との安全性向上を両立可能な車両のアイドルストップスタート制御装置を提供する。
【解決手段】アイドルストップ制動中にスタート釦22aのプッシュ操作が行われると、スタートスイッチ判定部52が電源オフとし、ABSバルブユニット28による制動作動が停止される。更に、ブレーキペダル操作状態で、再び、スタート釦22aのプッシュ操作を行うと、電源が全てオンとされると共に、エンジン始動指令が発信される。自動ブレーキ制御部71によるブレーキ圧が所定の目標圧力になった時点で、再始動制御部63がエンジン2の再始動を許可し、エンジン始動が実行される。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】コースト走行時に回生トルクが付与されているときの変速部の変速に際して、何れの変速比でも回生制御を可能にし、且つ変速ショックを抑制すると共に、車輪にブレーキトルクを付与する制動装置の耐久性悪化を抑制する。
【解決手段】判断された走行車速領域における最低速側変速比を成立させるときのコーストダウンシフト時に制動力協調コーストダウン制御が行われるので、自動変速部20の何れの変速比γATでも第2電動機M2による回生制御が行われつつ、走行車速領域におけるコーストダウンシフトの中で変速ショックが最も大きくなると考えられる最低速側変速比を成立させるときのコーストダウンシフト時の変速ショックが抑制される。また、走行車速領域における最低速側変速比を成立させるとき以外のコーストダウンシフトでは制動力協調コーストダウン制御が行われず、ホイールブレーキ装置40を作動させないことが可能になる。
(もっと読む)
制動力保持制御装置
【課題】クラッチセンサというクラッチミートのタイミングを検出するためにのみ必要とされる部品を備えなくても、個々の人のクラッチミートのタイミングに合せて制動力の保持を解除できるようにする。
【解決手段】EFI−ECU80からブレーキECU70にスロットル開度等に関する情報を伝える。そして、ブレーキECU70にて、無負荷時のエンジントルクを求め、無負荷時のエンジントルクと実際のエンジントルクとの差が所定値以上となった場合に、クラッチミートしたと判定する。このようにすれば、クラッチセンサというクラッチミートのタイミングを検出するためにのみ必要とされる部品を備えなくても、個々の人のクラッチミートのタイミングを検出することができ、それに合せて制動力の保持を解除することが可能となる。
(もっと読む)
液圧ブレーキ装置
【課題】ブースタ効き特性制御において運転者のブレーキフィーリングの低下を抑制する。
【解決手段】ブレーキペダルの操作ストロークとマスタシリンダ圧との関係において、マスタシリンダ液圧の増加勾配が変化した場合に、ブースタが助勢限界に達したとされる。ブースタが助勢限界に達した場合のマスタシリンダ液圧と定常状態のブースタ負圧との複数の組に基づいて、ブレーキ操作前のブースタ負圧と助勢限界時液圧との実際の関係が取得される。その実際に取得された関係を利用して、ブースタが助勢限界に達したことが検出され、ブースタ効き特性制御が行われる。その結果、ブースタ効き特性制御を適切な時期から開始させることができ、運転者のブレーキフィーリングの低下を抑制することができる。
(もっと読む)
電動車の制御装置
【課題】回生制動中に摩擦クラッチが滑り状態となったとき、ショック無く、且つ、滑り発生から早期に摩擦クラッチを締結状態に移行させることで、車両減速度や回生量への低下影響を最小に抑えることができる電動車の制御装置を提供すること。
【解決手段】モータジェネレータMGと左右後輪RL,RRの間に油圧締結による第2クラッチCL2を介装し、制動要求時、モータジェネレータMGを発電モードとし、第2クラッチCL2を経過して左右後輪RL,RRに回生制動トルクを付与する回生制動制御手段を備えたFRハイブリッド車の制御装置である。回生制動制御手段(図4)は、回生制動制御中、第2クラッチCL2が滑り状態であることを検出したら、第2クラッチCL2の差回転を小さくするようにモータジェネレータMGの回転数を制御し、第2クラッチCL2の差回転を小さくした後、第2クラッチCL2への油圧指令値を増大させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速時にエンジンの燃料カットリカバリを行う際、モータジェネレータによりエンジン回転数を維持できる条件下でのリカバリショックの発生を防止しつつ、モータジェネレータによりエンジン回転数を維持できない条件下でのエンジンストールを防止することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータジェネレータMGと第1クラッチCL1と第2クラッチCL2を備えたハイブリッド車両において、両クラッチCL1,CL2を締結し、エンジン燃料カット状態での走行中、エンジンストールに至るようなエンジン減速度を検知した場合、モータジェネレータMGによりエンジン回転数を維持できるときは、第2クラッチCL2を開放した後、エンジンEngの燃料カットをリカバリし、モータジェネレータMGによりエンジン回転数を維持できないときは、第1クラッチCL1を開放し、エンジンEngの燃料カットをリカバリする燃料カットリカバリ制御手段(図4)を設けた。
(もっと読む)
自動車の制御方法及び装置
【課題】
本発明の課題は、電動パーキングブレーキを備える自動MT車両において、運転者のスイッチ操作にしたがって電動パーキングブレーキを解除する場合であっても、車両の意図しない方向への移動を防止する制御方法を提案することにある。
【解決手段】
運転者のスイッチ操作にしたがって電動パーキングブレーキを解除する場合であっても、クラッチの係合を開始したのち、電動パーキングブレーキの制動状態を解除することにより、上記課題を解決する。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
ハンドガイドローラ
【課題】振動式のハンドガイドローラにおいて、ロールの内部に油圧式の走行制動装置を設けるにあたり、走行油圧モータへの振動の負担を低減する。
【解決手段】防振部材よりもばね下質量側に、振動装置と、車体の両側に設けられ、ロール3を軸支するとともにこのロール3に振動装置からの振動を伝達する一対のサイドフレーム14と、一方のサイドフレーム14に取り付けられる走行油圧モータM2と、ロール3を制動する油圧式の走行制動装置31と、を備えたハンドガイドローラHにおいて、走行制動装置31を、走行油圧モータM2と別体に構成して、走行油圧モータM2を介さずにロール3を制動するように設けた。
(もっと読む)
車両の制御装置
【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者による制動操作中の減速抜けによるショックの発生および制動装置の耐久性の悪化を抑制する。
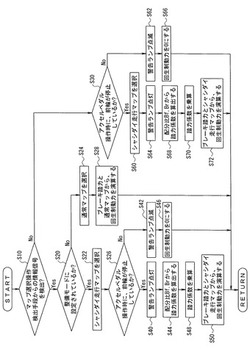
【解決手段】HV_ECUは、運転者の操作によるダウンシフト要求がなく(S100にてNO)、車両の周囲の状況に応じたダウンシフト要求があり(S104にてYES)、かつ、ブレーキが作動中である場合(S106にてYES)、ダウンシフト要求を拒否するステップ(S108)と、運転者の操作によるダウンシフト要求があるか(S100にてYES)、または、ブレーキの作動中でない場合(S106にてNO)、ダウンシフト制御を実行するステップ(S102)とを含む、プログラムを実行する。
(もっと読む)
車両の速度制御装置
【課題】車両がカーブを通過する際において、円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ内にて、車両の減速が完了する地点の基準となる基準地点Pcr、車速の維持が完了する地点の基準となる基準地点Pca、及び、車両の加速制限が完了する地点の基準となる基準地点Pcsが設定される。自車位置Pvhと基準地点Pc#との間の相対距離Lvh#がそれぞれ演算される。車両がPcrを通過するまではLvhrに基づいて演算される目標車速Vto1が、車両がPcrを通過した後はLvhaに基づいて演算される目標車速Vto2が、車両がPcaを通過した後はLvhsに基づいて演算される目標車速Vto3が、目標車速Vtoとして決定される。運転者が加速操作を行わない場合、車速が自車位置における目標車速Vtoを超えないように調整される。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車両の速度制御装置
【課題】カーブを通過する際、運転者の車両を加速させたいという意志に応じて、運転者の違和感が少なく且つ円滑な速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】カーブ車速制御において、運転者が加速操作を行わない場合(加速操作量Ap=0)に対応する目標車速Vtoが、第1、第2、第3目標車速Vto1,Vto2,Vto3で構成される特性に従って決定される。Vto1は、地点Pcrまで減少して地点Pcrにて適性車速Vqoとなり、Vto2は、地点Pcrから地点Pcaまで適正車速Vqoに維持され、Vto3は、地点Pcaから地点Pcsまで増大する特性に決定される。運転者による加速操作量Apに基づいて修正車速Vzが演算され、制御中に亘ってVtoにVzが加算されて目標車速Vt(=Vto+Vz)が決定される。そして、車速が目標車速Vtを超えないように調整される。
(もっと読む)
自動車用乗員保護装置
【課題】プリクラッシュセーフティシステムを搭載した車両に用いて好適の自動車用乗員保護装置に関し、衝突が予測される状況において乗員が受けるダメージを低減する。
【解決手段】車両に搭載され車両の衝突を推定する衝突推定手段15と、衝突推定手段15により車両の衝突が推定されると、車両衝突前に乗員に対して筋肉を刺激して筋肉を収縮させる筋肉刺激手段14とを有する
(もっと読む)
作業車両の制御装置
【課題】発進と走行停止、前進と後進の切換などの各操作を、操作レバー232の変速操作にて簡単に実行できる作業車両の制御装置を提供するものである。
【解決手段】走行車輪3,4を備えた走行機体2に搭載されたエンジン5からの動力を変速する油圧式無段変速機29と、油圧式無段変速機29の変速比を変更する操作レバー232と、油圧式無段変速機29からの変速駆動出力を前記走行車輪3,4に伝達する走行用クラッチ40,42と、走行車輪3,4を制動するブレーキ65とを備えてなる作業車両において、操作レバー232の前進操作又は後進操作によって走行用クラッチ40,42が入り作動した状態で、走行車輪3,4のブレーキ解除が確認されたときに、操作レバー232の操作量に応じて、予め設定した変速比パターンに基づき、油圧式無段変速機29の出力回転数が制御されるように構成したものである。
(もっと読む)
運転支援装置
【課題】操舵力制御と制駆動力制御との制御分担比を適切に設定する運転支援装置を提供する。
【解決手段】自車両前方の環境情報に基づいて自車両を操向する運転支援装置を、自車両前方の環境を認識する環境認識手段110と、環境認識手段を用いて自車両の目標操向量を算出する目標操向量算出手段140と、操舵輪タイヤが発生するタイヤ力を算出するタイヤ力算出手段170と、操舵輪タイヤの限界タイヤ力を推定する限界タイヤ力推定手段167と、操舵機構に付与される操舵力を制御する操舵力制御手段200と、左右輪の制駆動力差を制御する制駆動力制御手段190と、目標操向量を所定の制御分担比で割り振ることにより操舵力制御手段の目標操舵力及び制駆動力制御手段の目標制駆動力差を設定するとともに、タイヤ力の限界タイヤ力への接近に応じて、制駆動力制御手段の操舵力制御手段に対する制御分担比を増加させる制御分担比設定手段180とを備える構成とする。
(もっと読む)
161 - 180 / 308
[ Back to top ]