
Fターム[3D246HA26]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | エンジン状態 (308)
Fターム[3D246HA26]に分類される特許
81 - 100 / 308
車両の坂道発進支援ブレーキ装置およびその制御方法
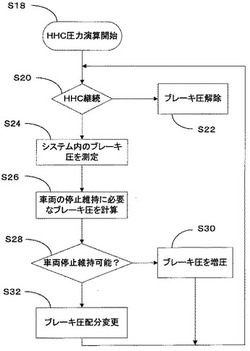
【課題】運転者の操作を介さずに坂道等で停車状態を維持するのに必要なブレーキ力を保持するための方法を提供する。
【解決手段】本発明の一実施形態によれば、車両の停止中に車両の制動力を制御する方法が提供される。本方法は、(a)車両の停止を検出するステップと、(b)運転者によるブレーキ入力解除を検出するステップと、(c)運転者によるブレーキ入力解除時の車両の総ブレーキ力を算出するステップと、(d)車両の停止維持に必要なブレーキ力を計算するステップと、(e)算出された総ブレーキ力で車両の停止を維持できるかどうかを判断するステップと、(f)測定された総ブレーキ力で車両の停止を維持できないと判断されたときに、車両の総ブレーキ力を増加させるステップと、を有する。
(もっと読む)
車両の電力供給制御装置

【課題】エンジン停止後に再始動条件が成立した場合にエンジンを再始動させるとともに、車両の走行可能状態において特定条件が成立したことを要件として特定制御を実行するものにおいて、エンジンの始動に起因して特定制御が不安定になることを抑制する。
【解決手段】車両10は、スタータ21と、エンジン20の運転中に停止条件が成立した場合にエンジン20を自動停止させるとともに、エンジン停止後に再始動条件が成立した場合にスタータ21によりエンジン20を再始動させるECU33と、車両10の走行状態において特定条件が成立したことを要件としてアンチスキッド制御を実行するABS36と、ナビゲーション装置37及びオーディオ装置38と、バッテリ31とを備える。ECU33は、車両10の走行状態において特定条件が成立しており、且つ所定の再始動条件が成立している場合に、バッテリ31から装置37,38へ供給される電力を遮断する。
(もっと読む)
ハイブリッド自動車
【課題】走行モードが切換えられる際のトルクショックを低減し、切換え後の変速制御を排除できるハイブリッド車を提供する。
【解決手段】車両1に搭載されるエンジン2と、走行用モータ4と、バッテリ12と、発電機3と、車速検出手段se1、se2と、バッテリの残容量Eqを検出する残容量検出手段16とを備え、残容量Eqが第1閾値Eq1以上の場合に第1走行モードEV、第2走行モードMs、第3走行モードMpのいずれかで走行するよう選択するモード選択手段A1を備え、モード選択手段A1は、残容量Eqが第1閾値未満の状況下では第1速度Sc1より小さい第2速度Sc2以上の場合に第3走行モード域Mpを選択し、所定の第2速度Sc2未満の場合に第2走行モードMsを選択し、第3速度未満Sc3の場合に第1走行モードEV又は第2走行モードMsを選択する。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】高いブレーキ圧が発生させられている場合にエンジンの再始動による電源電圧低下が発生することでABS制御の制御性が確保できなくなることを抑制する。
【解決手段】ブレーキ圧が第1の閾値以上になるとIS制御によるアイドルストップを実行するが、ブレーキ圧が第1の閾値よりも大きな第2の閾値以上になると、アイドルストップが禁止されるようにする。これにより、第2の閾値以上のブレーキ圧が発生している状況下においてアイドルストップが実行された場合に、アイドルストップ実行後にABS制御が開始され、さらにエンジン1が再始動されたときに、ABS制御の制御性を確保できなくなるという不具合が発生することを防止することができる。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
トラクションコントロール装置
【課題】駆動輪のスリップ状況に応じて各車輪の駆動力を適切に分配することができ、十分な加速性および旋回走行時のコーストレース性を確保できるトラクションコントロール装置を提供すること。
【解決手段】トラクションコントロール装置は、車輪の回転速度検出手段43FL〜43CRと、回転速度に基づき差動調整機構の制御を行うか否かを判定する制御開始判定手段82と、制御開始判定手段82の判定結果に基づき差動調整機構の制御を行う差動調整機構制御手段85とを備え、制御開始判定手段82は、左右輪回転速度差算出部と、左右輪の回転速度差が左右輪回転速度差用の所定の閾値以上となるか、または左右輪の回転速度比が左右輪回転速度比用の所定の閾値以上となった場合に、差動調整機構の制御を開始すると判定する制御開始判定部とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】車両用ブレーキ装置において、ブレーキペダルの踏み込み開始時点から所定状態となるまでの低踏力領域において回生制動力を積極的に利用することにより、高回生効率、高燃費を達成するとともに、ブレーキペダルが急踏みされた場合に基礎液圧制動力をできるだけ早期に付与する。
【解決手段】車両用ブレーキ装置において、マスタシリンダ23の第1液圧室23dに設けられてリザーバタンク24と連通する第1ポート23hを、同ポート23hを閉塞する第1ピストン23bの閉塞端の踏み込み開始状態に対応した第1位置から第1ピストン23bの増圧方向に所定距離Sだけ離れた所定状態に対応した第2位置に設けるようにしている。第1ポート23hには、ブレーキペダルの急踏み時においては、マスタシリンダからリザーバタンクへのブレーキ液の流れを制限し、一方非急踏み時においては、流れが制限されないように構成されたオリフィスが設けられている。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
車両用ブレーキ装置
【課題】車両用ブレーキ装置において、ブレーキペダルが非急踏みされた場合に回生制動力を積極的に利用することにより、高回生効率、高燃費を達成するとともに、ブレーキペダルが急踏みされた場合に基礎液圧制動力をできるだけ早期に付与することの両立を図る。
【解決手段】車両用ブレーキ装置は、ブレーキペダルとマスタシリンダのピストンとの間に設けられた連結部材に備えられ、第1ロッド26aと、第2ロッド26bと、両ロッド26a,26bを離れる方向に付勢する付勢部材73とを備えた操作力伝達機構70を備えている。操作力伝達機構70は、両ロッド26a,26bの間に形成されている内部空間75と外部とを連通して内部空間75内の流体が流入出する連通路74を備え、連通路74は、内部空間75からの流体の流出がブレーキペダルの急踏み時には制限され、非急踏み時には制限されないように構成されている。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の加速度に基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の運転操作に起因して変動する加速度の変動成分のうち予め定めた特定のノイズ成分を減衰させるノイズ成分除去手段(ブロックB31〜B39)と、そのノイズ成分除去手段によりノイズ成分を減衰させた加速度に基づいて指標を求める走行指標設定手段(ブロックB40)とを設けた。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
作業用車両の走行装置
【課題】蓄電装置の過充電を防止すると共に、主ブレーキ装置の過熱による破損やブレーキ力不足の発生を防止し、減速時に十分なブレーキ力を確保しかつ燃費改善も十分に図る。
【解決手段】減速走行時には、それ以外の走行時よりもHSTの油圧モータの容量を増加又は油圧ポンプの容量を減少させ(S6)、この状態で車両の運動エネルギーをHSTを介して回生する。減速走行時でかつ蓄電装置の蓄電量が設定値より小さい場合には、回生したエネルギーにより発電・電動機を発電機として動作させて発電し(S11)、この発電した電力を蓄電装置に蓄電し、このとき補助ブレーキ装置が動作中であれば、発電量の増加に応じて補助ブレーキ装置のブレーキ力を減じるかオフとする(S8)。減速走行時でかつ蓄電装置の蓄電量が設定値より大きい場合には、回生したエネルギーによる発電・電動機の発電動作をオフとし(S13)、補助ブレーキ装置を作動させる(S12)。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
ブレーキ制御装置
【課題】 減圧時における減圧弁の作動頻度を低減できるブレーキ制御装置を提供する。
【解決手段】 ブレーキECU102は、同一配管系の2つのホイルシリンダW/Cに対する液圧指令値Pwcomにおいて、一方の液圧指令値Pwcomが他方の液圧指令値Pwcomよりも低く、低圧側のホイルシリンダW/Cの液圧指令値Pwcomが減圧指令である場合に、一方のソレノイドインバルブ4とソレノイドアウトバルブ5を共に閉じて低圧側のホイルシリンダW/Cの液圧を保持するよう液圧制御を行い、その後2つの液圧指令値Pwcomが略同一となったとき、ソレノイドインバルブ4を開弁する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 オーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させたときに、逆にオーバーステア状態が助長されるの事態を防止する。
【解決手段】 旋回方向判定手段が車両の旋回方向を判定すると(ステップS32)、旋回内輪スリップ率算出手段が旋回内輪のスリップ率Rslを算出し(ステップS33)、そのスリップ率Rslが閾値を超えると、駆動力配分量保持手段(ステップS35)が駆動力配分装置の駆動力配分量を前記スリップ率Rslが閾値Rrefを超えたときの値に保持する。これにより、旋回中に生じたオーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させても、旋回内輪に作用する荷重がタイヤの摩擦円を超えるのを未然に防止することで、旋回内輪がスリップしてグリップが失われのを回避し、オーバーステア状態が助長されないようにして車両挙動の安定化を図ることができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両制御装置
【課題】勾配センサを用いずに、傾斜路における燃料カットハンチングを抑制することができる車両制御装置を提供する。
【解決手段】車両制御装置は、走行中の道路においてクルーズコントロールで要求される走行状態に自車を制御するための自車のエンジントルクTEを算出する(S109,S111)と共に、燃料カットを行わない時における前記自車の最小出力のエンジントルクTMINと、燃料カット時における前記自車のエンジントルクTFCと、を算出する(S115)。そして、TFC<TE<TMINの関係が成立する場合に(S117)、前記自車のエンジンの燃料カットを禁止する(S119)。
(もっと読む)
81 - 100 / 308
[ Back to top ]