
Fターム[3D246HA26]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | エンジン状態 (308)
Fターム[3D246HA26]に分類される特許
41 - 60 / 308
ハイブリッド車両の制御装置
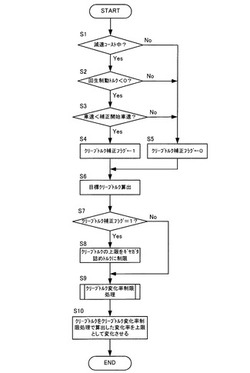
【課題】回生協調ブレーキ制御時のショックを抑制することを目的とする。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、所定の低車速域で、車速に応じた大きさのクリープトルクを駆動トルクとして発生させるクリープトルク発生手段(S10)と、回生協調ブレーキ制御時に前記回生制動トルクが0になるまでは、車速にかかわらずクリープトルクの大きさをハイブリッド車両の駆動系のバックラッシュを抑制可能な0に近い所定のガタ詰めトルクに制限するクリープトルク制限手段(S8)と、回生制動力が0になった後は、クリープトルクをガタ詰めトルクから車速に応じた大きさのクリープトルクへと変化させるときの変化率を制限するクリープトルク変化率制限手段(S9)と、を備える。
(もっと読む)
制動履歴データベース作成装置及び作成方法

【課題】車両における省燃費運転の精度を向上すること。
【解決手段】車両の位置情報を取得する位置情報取得部11と、車両の制動装置が作動していることを判定する制動判定部12と、を備え、位置情報取得部11が取得した位置情報とともに制動装置の制動履歴が格納されるデータベース21を作成する。制動履歴取得部15は、位置情報取得部11が取得した車両の位置情報に基づいて当該車両の進路上にある制動履歴などのデータをデータベース21から取得する。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上しつつ運転性を確保可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールドと判定され、かつ、勾配路に応じた所定時間が経過したときは、ブレーキ制御手段を用いて車輪に機械的制動トルクを付与すると共に、クラッチの締結トルクを低下させる締結要素保護制御を実施することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】摩擦締結要素のスリップ制御中にブレーキ操作があった場合に、協調回生制御トルクの増加を禁止することにより、意図しないスリップによるショックの発生を防止可能なハイブリッド車両の制御装置を提供する。
【解決手段】エンジンEngに第1摩擦締結要素CL1を介して締結されたモータジェネレータMGと、モータジェネレータMGと駆動輪との間に介装された摩擦締結要素CL2を含む有段の自動変速機ATと、メカニカルブレーキ操作に基づくブレーキコントローラ9からの目標ブレーキトルクBSと車速情報に基づく最大回生トルクとの差分から目標回生トルクを算出して協調回生制御を実行する協調回生制御実行手段10とを備えている。
協調回生制御実行手段10は、メカニカルブレーキ操作による目標ブレーキトルクBSの増加の判断と第2摩擦締結要素CL2がスリップ中であるか否かを判断する判断部M11と、目標ブレーキトルクBSの増加時でかつ摩擦締結要素CL2のスリップ中に回生トルクの増加を禁止する回生トルク増加禁止手段M11とを有する。
(もっと読む)
坂道発進補助制御装置
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
車両の制御装置
【課題】回生制動中にショックの発生を抑制する車両の制御装置を提供する。
【解決手段】制動時に、モータジェネレータによって発生する回生制動力とホイールブレーキによって発生する摩擦制動力との少なくとも一つによって車両を制動させる車両の制御装置である。統合コントローラは、回生制動中に回生トルクおよび摩擦制動トルクを算出し、回生制動中に変速機で変速を行っている場合に、回生トルクに基づいて変速機出力トルクを算出し、摩擦制動トルクがゼロではない場合に、トルクフェーズ中の前記変速機出力トルクの変動を相殺する摩擦制動トルク補正値を算出し、摩擦制動トルク補正値に基づいて、ホイールブレーキで摩擦制動力を発生させる。
(もっと読む)
エンジン制御装置
【課題】ブースタ負圧によるブレーキ補助力確保の確実性向上、及びアイドルストップ期間の拡大による燃費向上の両立を図ったエンジンの制御装置を提供する。
【解決手段】エンジンの吸気負圧をブースタ負圧として導入し、運転者によるブレーキペダル踏力をブースタ負圧で補助するブースタ装置と、車速がゼロになるのを待たずしてエンジンの自動停止を許可させるアイドルストップシステムと、を備えた車両に適用され、エンジンの自動停止時において、ブースタ負圧が所定の閾値TH1未満になった場合に、エンジンを自動再始動させてブレーキ補助力を回復させるブレーキ用再始動手段と、エンジンの運転時のブースタ負圧の低下量Δpave(ブレーキ補助力が低下していく履歴)に基づき、エンジンの自動停止禁止の是非を判定するアイドルストップ禁止判定手段S23と、を備える。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び制御対象車輪の全てについてのトラクション制御の両者が同時に行われる場合に、駆動要求が満たされない不満を運転者が感じる虞れを低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回補助制御の実行中にトラクション制御によって全ての制御対象車輪の前後力が低減される状況に於いては、旋回補助制御による旋回内輪の前後力の低減量を小さくし、或いは旋回補助制御による旋回内輪の前後力の低減を中止する。これにより旋回内輪の前後力の低減量が減少する量にて車両全体の駆動力が増大される。
(もっと読む)
車両の制動制御装置、車両の制御装置及び車両の制動制御方法
【課題】車両を停車させる場合に車輪に対する制動力を小さくするブレーキ操作を運転手が行ったとしても、運転手の意図しない車両の移動を抑制することができる車両の制動制御装置、車両の制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に対する制動力を小さくするブレーキ操作が運転手によって行われた場合において、マスタシリンダ内のMC圧Pmcが、路面の勾配に応じた値に設定された勾配相当MC圧Pmctha以下になった第2のタイミングt12で、車輪に対する制動力を保持する第1制動制御を開始し、その後、路面の勾配が急勾配側に変化した場合に、車輪に対する制動力を増大させる第2制動制御を開始する(第3のタイミングt13)。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの改良を図る。
【解決手段】静圧相当制御中に、移動判定時間内のパルス累積値が移動判定しきい値以上になった場合には、通常時制御が実行される。それにより、ブレーキシリンダ液圧が増加させられ、車両の移動が良好に防止される。このように、パルスの累積値に基づくため、回転速度に基づく場合に比較して、車両のゆっくりした移動の有無を、正確に検出することが可能となる。また、その後、パルス無し状態が停止判定時間以上継続すれば、静圧相当制御が開始されるのであり、静圧相当制御を適切に行うことが可能となる。
(もっと読む)
衝突回避装置
【課題】自車両と当該自車両周辺に検知された障害物との衝突が回避されて、自動制動システムによる自動ブレーキ制御を解除しようとする際に、運転者によるアクセル操作の意思を尊重しつつ、自車両と当該自車両周辺に検知された障害物との衝突が回避された直後に自車両が急発進しないようにする衝突回避装置を提供する。
【解決手段】本発明の衝突回避装置は、自車両周辺の障害物を検知し、当該障害物との衝突を回避する衝突回避システムを備えた衝突回避装置であって、自車両周辺の障害物を検知する障害物検知手段と、衝突回避システムによってブレーキを制御するブレーキ制御手段と、ブレーキ制御手段によって自車両のブレーキを制御した後、当該障害物との衝突を回避したか否かを判定する衝突回避判定手段と、当該障害物との衝突を回避したと判定された場合、予め設定された制限駆動力を超えてエンジン駆動力を上昇させないエンジン駆動力制御手段とを備える。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
車両の坂道発進補助装置
【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
車両の制動力制御装置
【課題】車両挙動を適切に保つ際のブレーキ制御量を最小化してドライバが感じる減速度(失速感)を最小とし、且つ、ブレーキ負荷を低減する。
【解決手段】エンジン駆動力を算出し、エンジン駆動力の時間的な変化量(駆動力の変化量)を算出し、車両に作用する走行抵抗を算出し、これら駆動力の変化量と走行抵抗とに基づいて、走行抵抗により発生する減速度を、ドライバが違和感なく許容できる(失速感として感じない)減速度として用いて、走行抵抗以上で、且つ、駆動力の変化量以下の車輪に付加する制動力(付加制動力)を設定して、この付加制動力を基に、目標ブレーキ液圧を算出してブレーキ駆動部15に出力する。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両のブレーキ保持力制御装置
【課題】車両が停止している路面の勾配と自動変速機の油圧状態に応じてブレーキ力の保持を開放するタイミングを変更することによって車両の違和感の無いスムーズな発進を可能とする車両のブレーキ力保持制御装置を提供すること。
【解決手段】油圧で駆動される自動変速機4を備え、ブレーキ装置7のマスタシリンダ11とホイールシリンダ12とを連通させる液圧通路13に設けられた電磁弁14によってマスタシリンダ11とホイールシリンダ12との連通を遮断し、ブレーキペダル9の踏み込みが解除された後もブレーキ液圧をホイールシリンダ12に残してブレーキ力を保持することができる車両のブレーキ力保持制御装置において、車両が停止状態にあるときに前記自動変速機4の油圧が予め定められた閾値を超えると、その時点で車両の発進が可能であると判断してブレーキ力の保持を解除するECU(制御手段)3を設ける。
(もっと読む)
パーキングブレーキ制御装置
【課題】電動パーキングブレーキシステム及びアイドルストップシステムを備えた車両において、アイドルストップの解除に伴いパーキングブレーキを自動解除する際に車両が後退するおそれを低減するパーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキを電動モータで自動作動させる電動パーキングブレーキシステム、及びエンジンを自動停止させるアイドルストップシステムを備えた車両に適用され、アイドルストップの実施に伴い、パーキングブレーキを自動作動させるパーキングブレーキ制御手段(S13)と、アイドルストップを解除してエンジンを自動再始動させる要求が生じている時にパーキングブレーキを自動解除させるパーキングブレーキ解除手段(S70)と、を備える。そして、前記パーキングブレーキ解除手段は、車両の発進駆動力が所定値以上になっていることを条件(S60:YES)として、前記自動解除を許可する。
(もっと読む)
車両の制動制御装置
【課題】 ABS制御開始時の「G抜け感」を抑制することができる車両の制動制御装置を提供する。
【解決手段】 ABS制御の作動を予測するABS作動予測手段を設け、ブレーキコントローラ5は、ABS制御の作動が予測された場合、ABS制御の作動が予測された場合、ブレーキ液圧ユニット19の性能で決まる摩擦制動力上昇勾配に合わせた減少勾配で回生制動力をゼロまで減少させる。
(もっと読む)
41 - 60 / 308
[ Back to top ]