
Fターム[3D246HA48]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 時間 (194)
Fターム[3D246HA48]に分類される特許
141 - 160 / 194
車両の良好な始動ギヤの自動的または半自動的選択のための方法および装置
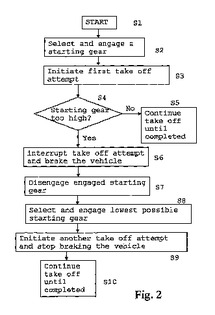
車両の良好な始動ギヤの自動的選択のための方法及び装置において、車両停止状態で第1車両始動ギヤを嵌合させるステップ(S2,S32)と、ドライバの要求により、第1車両発進の達成を試行するように推進トルクを制御するステップ(S3,S33)と、前記第1車両始動ギヤが前記第1車両発進を中断して前記車両を制動するステップ(S4,S34)と、前記第1車両始動ギヤを解離させるステップ(S7,S37)と、前記第1始動ギヤと比較して低いギヤである第2始動ギヤを嵌合させるステップ(S8,S38)と、第2車両発進の達成を試行するように推進トルクを制御するステップと、前記第2車両発進の試行の結果、発進を実施するのに充分なトルクが前記車両の従動輪に伝達される場合に、前記車両の制動を停止させるステップ(S9,S39)と、含む。本発明の利点は、誤って選択された始動ギヤが自動的に変化することである。前記始動ギヤの変化は上り坂の状況において達成される。 (もっと読む)
油圧制御装置および油圧制御方法、油圧制御装置の調整方法

【課題】製品出荷時等におけるネガティブブレーキの油圧制御装置の調整作業を、従来よりも大幅に省力化することが可能な油圧制御装置および油圧制御方法、油圧制御装置の調整方法を提供する。
【解決手段】油圧制御部20は、ステアリング装置5に含まれるブレーキシリンダ15a,15bを制御するとともに、第1制御部20aと学習制御部20cとを備えている。第1制御部20aは、操作開始前の油圧よりも低い所定の逆トリガ油圧指令値を逆トリガ時間だけ保持する第1制御を行う。学習制御部20cは、実際の制動時における加速度等をフィードバックして、第1制御における逆トリガ時間を最適化する制御を自動的に行う。
(もっと読む)
湿式マルチディスクブレーキの操作方法および湿式マルチディスクブレーキ
本発明は、半径方向に延在する固定ディスクと回転ディスク(6、7)が、ブレーキング時に、空隙を除去しつつ互いに押圧される、冷却オイルによって湿式回転を行う、特に路上走行車両のためのマルチディスクブレーキを操作するための方法に関する。この方法は、ブレーキを弛めた後に、互いに組み込まれたディスク(6、7)が互いに離間され、、オイルを含まないかまたはオイルを実質的に含まない空隙が形成され、かつブレーキングに先立つディスク(6、7)の送りによって空隙が最小化されるように形成されている。 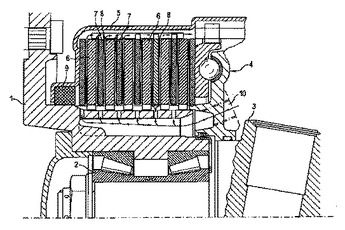 (もっと読む)
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
ブレーキ装置
【課題】異常判定の精度が向上されたブレーキ装置を提供する。
【解決手段】ブレーキ装置は、運転者のブレーキ操作に応じて発生される作動液圧の作用により車輪と共に回転する回転部材に摩擦部材を押圧することで車輪に制動力を付与する。このブレーキ装置は、所定の異常判定条件が成立した場合に作動液圧の応答異常を検出する制御部を備える。制御部は、ブレーキ操作開始前の回転部材と摩擦部材との間のクリアランスが基準を超えた状態であることが想定される場合には異常判定条件を緩和する。
(もっと読む)
車両用警報装置
【課題】 ドライバに対して複数の警報を発することが可能な車両用警報装置に関し、同時に複数の警報が出力されるような状況において、警報の優先順位を適切に設定してドライバの混乱を未然に防止する。
【解決手段】複数の警報を報知可能な警報手段2,4と、車両前方の先行車又は障害物を捕捉し、対象物との距離又は衝突予測時間に基づいて警報手段2,4から警報を発したり、車両1の作動状態を制御する衝突防止装置30と、ドライバの状態又は車両の状態に基づいて警報手段2,4から警報を発生する装置20,11と、警報手段2,4に対して警報の優先順位を設定する優先度設定手段8とをそなえ、優先度設定手段8は、衝突防止装置30で捕捉された対象物に対して、衝突防止装置の警報や作動を実行するべき対象物として信頼できる度合いを求め、当該度合いに基づいて優先順位を設定するように構成する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置のメンテナンス性を向上させる。
【解決手段】ブレーキ制御装置は、ブレーキ液圧の応答性に異常が検出されたときに正常時のブレーキモードから異常時のブレーキモードに移行する。ブレーキ制御装置は、ブレーキ制御装置に電力を供給する電源と、異常検出が電源の電圧低下に起因する場合には、所定条件が成立したときに異常時のブレーキモードから正常時のブレーキモードに復帰させる制御部と、を備える。所定条件は、電源の電圧が所定レベルに回復したことを含んでもよい。
(もっと読む)
車線逸脱防止装置及び車線逸脱防止方法
【課題】車両の走行車線に対する逸脱傾向の度合いが小さくても、車両の逸脱をより防止可能とする。
【解決手段】走行車線に対する車両の逸脱傾向の度合いに応じたヨーモーメントM1を算出し、その算出したヨーモーメントM1に応じた目標ヨーモーメントMsを車両に付与する。その際に、算出したヨーモーメントM1が最小目標ヨーモーメントMmin以下の場合には、時間と共に増加する最小制御ヨーモーメントMsmを使用する。この最小制御ヨーモーメントMsmの初期値Msm0は、最小目標ヨーモーメントMminよりも小さい値である。
(もっと読む)
電気制動トルクの補償を行なうハイブリッド車両の制動方法
本発明はハイブリッド車両(1)の制動方法に関するものであり、この車両(1)は、ドライブトレインコンピュータ(12)により制御されるドライブトレイン(3)と、制動コンピュータ(21)により制御される油圧制動システム(15)を備える。この方法では、ドライブトレインコンピュータ(12)が、電気制動トルクが低下していることを検出すると直ぐに、このドライブトレインコンピュータ(12)から前記油圧制動コンピュータ(21)に、電気制動トルクの前記低下を表わす値が通知される。次に、電気制動トルクのこの低下が、車輪(2)にブレーキ(17)を介して加わる油圧制動トルクで補償されるように、前記制動コンピュータ(21)により前記油圧制動システム(15)が作動される。  (もっと読む)
(もっと読む)
車両の制動装置
【課題】簡単な構成によって、障害物の存在に起因して制動力を発生させた後にその障害物との衝突の可能性がまだある場合、制動力の発生を中断または中止してしまうことを確実に防止することができる制動装置の提供。
【解決手段】ECU5は、物体検出センサ4が検知した物体が車両1と衝突する可能性がある障害物であると判定したとき、物体検出センサ4が検出した位置情報及び相対速度に基づいて、ブレーキアクチュエータ6及びディスクブレーキによる制動力の発生を開始させる。ECU5は、ブレーキアクチュエータ6及びディスクブレーキが制動力を発生しているとき、物体検出センサ4が検出する位置情報に基づいて物体が車両1の進行方向前方の所定範囲に存在するか否かを判定し、物体が所定範囲に存在すると判定した場合、ブレーキアクチュエータ6及びディスクブレーキによる制動力の発生を継続させる。
(もっと読む)
車両走行制御装置
【課題】ハンチングや違和感を抑制できる車両走行制御装置を提供すること。
【解決手段】車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度センサ3と、前記車輪に制動力を付与することができるブレーキ装置200と、前記車輪速度センサ3で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与するブレーキ装置制御部83と、前記ブレーキ装置200を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定部84と、を備える。
(もっと読む)
不充分な通過可能高さ又は不充分な通過可能幅を持つ障害物を警告する方法及び装置
【課題】小さすぎる通過可能高さ又は小さすぎる通過可能幅を適時に運転者に警告する。
【解決手段】通過にとって重要な障害物のデータを求めるため、前にある頭上障害物又は前にある側方障害物及びそれぞれの車道表面が走査され、求められた障害物の通過にとって重要なデータが、車両の通過にとって重要なデータと比較され、車両の通過にとって重要なデータが、障害物の通過にとって重要なデータを上回るか又はそれと同じである場合、警告信号が運転者に与えられる。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
衝突被害軽減制動制御装置
【課題】前方障害物検知精度を向上させ、衝突被害軽減制動制御装置の作動状況を今より広範囲にすることを目的とする。
【解決手段】本発明の衝突被害軽減制動制御装置は、レーダにより前方障害物が検知された場合(S1)、カーブ推定手段(車線逸脱警報装置)が有効動作していれば(S2)、車間距離をしきい値と比較して(S3)、しきい値を越えていなければ、障害物が、カーブ推定手段にて推定された車線内に基準時間以上存在するか否か判断し(S5,S6)、存在する場合には制動制御を実行する(S7)。カーブ推定手段は、自車が走っている場所ではなく、先行車が走っている自車前方の車線カーブ状態について推定するので、レーダの捉えた障害物が自車の今いる車線の前方に存在するものか否かを精度良く判断することができる。したがって、障害物存在判断にかかる基準時間を、従来に比べて短く設定することが可能である。
(もっと読む)
車線逸脱防止装置
【課題】曲線路において、車線逸脱防止の制御を最適に行う。
【解決手段】制駆動力コントロールユニットは、自車両が逸脱傾向にある方向が曲線路の内側であると判定した場合(ステップS9〜ステップS11)、その逸脱傾向にある方向でかつ自車両の後方に、該自車両と略同方向に走行する他の車両が存在するか否かを判定し、前記他の車両が存在しないと判定した場合、ヨーモーメントの付与を抑制する(ステップS14)。
(もっと読む)
衝突被害軽減ブレーキ作動通報システム
【課題】 本発明は衝突被害軽減ブレーキ作動通報システムに関し、無線を用いて追突事故発生の状況を車両管理者に自動で伝えることのできる衝突被害軽減ブレーキ作動通報システムを提供することを目的とする。
【解決手段】 レーダからの車間距離情報と相対速度情報を基に衝突判断手段が前方車両との衝突の虞れを判断し、衝突の虞れありと判断した場合にブレーキを作動させて自車を減速させる衝突被害軽減ブレーキシステムと、サーバと無線通信可能な車載器とを備え、前記車載器は、前記衝突被害軽減ブレーキシステムによるブレーキ作動に関する情報を受け取り、サーバに衝突被害軽減ブレーキシステムによるブレーキが作動した旨の情報を送信することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】自動走行車速VAが自動走行解除車速VX1付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、自動走行車速VAの設定時に、前記両判定が肯定の場合に、自動走行解除車速VX1が所定時間Tc無効にされる。
(もっと読む)
作業車両の変速装置
【課題】作業車両の走行開始時に、該作業車両を逆走させることなく、進行方向に向かって円滑に発進させる。
【解決手段】作業車両1の運転状態が路上走行状態であり、該作業車両1の走行が停止している場合に、前記静油圧式無段変速装置10および前記ブレーキ機構52に対して発進操作が行われると、該静油圧式無段変速装置10で可動斜板15を中立位置から傾倒させると同時に、該ブレーキ機構52の駆動輪である後輪5に対する制動力を徐々に解除し、所定時間t2−t1の経過後にブレーキ機構52の制動力を完全に解除する。
(もっと読む)
アンチスキッド制御装置
【課題】アクセルセンサを備えなくてもアクセルペダルとブレーキペダルの両踏み状態を検出できるようする。
【解決手段】ABS制御中に、推定車体速度と後輪MAX輪の車輪速度との差が誤差許容値A以上の状態で、かつ、減圧モードが設定されているという状態となり、さらに、この状態が続けば両踏み状態と判定する。これにより、アクセルセンサを備えなくてもアクセルペダルとブレーキペダルの両踏み状態を検出できる。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】運転手によってブレーキ操作手段が操作される可能性が低いタイミングで下流側ブレーキ液路内の上流側ブレーキ液路に対する負圧を解消するための連通制御を実行することにより、ブレーキ操作手段の操作時に該操作に対する違和感を運転手に与える可能性を低減できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、ブレーキスイッチが「オン」から「オフ」に切り替ってから(ステップS11が肯定判定)の第1経過時間T1がオフ後経過時間閾値KT1以上になった場合(ステップS14が肯定判定)には、運転手によるブレーキレバー及びブレーキペダルの操作が完全に解消されたと判断する。そして、ECUは、各制動機構に設けられた各開閉弁がそれぞれ開閉駆動する連通制御を実行する(ステップS15)。
(もっと読む)
141 - 160 / 194
[ Back to top ]