
Fターム[3D246HA48]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 時間 (194)
Fターム[3D246HA48]に分類される特許
181 - 194 / 194
電動パーキングブレーキシステム
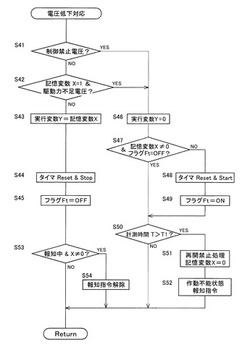
【課題】電源の電圧低下に適切に対処し得る電動パーキングブレーキシステムを得る。
【解決手段】電動パーキングブレーキを制御するプログラムに電圧低下対応処理を設ける。記憶変数Xには制御内容が記憶されており、その制御内容が実行変数Yに入力されることによって(S43)、後の処理において制御内容が実行される。一方、S41,42において、電圧低下状態であると判定された場合は、記憶変数Xの値に拘わらず、S46において電動モータを停止させる処理(Y=0)が行われ、制御が停止させられる。さらに、S47〜S50において、制御が停止させられた時間が計測され、設定時間経過後には制御の再開が阻止される(S51)。上記の処理により、電圧低下状態が短時間で終わった場合には制御を再開するが、長時間継続した場合には制御の再開を阻止することで、電圧低下に適切に対処することができる。
(もっと読む)
車両の車速制御装置

【課題】所定の設定速度に制御しつつ旋回限界を超えずに安定した旋回を確保可能な車両の車速制御装置を提供する。
【解決手段】先行車との目標車間距離に対応する所定の設定車速に応じた第1の目標車速指令値Vacc を演算し、その第1の目標車速指令値Vacc となるように車両の速度制御を行う先行車追従制御と、車両が安定して走行可能な限界旋回状態に近づいたと判定すると車両の安定した旋回走行を維持するために必要な目標減速度を演算しその目標減速度に応じた制動力を車両に負荷する旋回安定制御を行う。このとき、上記旋回安定制御が演算した目標減速度に応じた第2の目標車速指令値Vcop と、上記先行車追従制御が演算した第1の目標車速制令値とのいずれか小さい値側の目標車速指令値となるように排他的に車両の速度を制御する。
(もっと読む)
車両の運動制御装置
【課題】従来のように横滑り防止制御が行われる際に常にプレチャージを行うのではなく、より適切なときに予圧を行うことで、横滑り防止制御の効果の向上を図る。
【解決手段】切り返し状態になると想定される場合を判定し、この場合に予圧制御が実行されるようにする。これにより、より適切なときに予圧制御を開始することが可能となり、切り返し時により早いタイミングで旋回外輪に対して制動力を発生させられるため、旋回走行時にステアリングの切り返しが行われた場合に、切り込み時の横滑り低減機能を確保しつつ、切り返し方向における横滑りの発生を未然に低減させることが可能となる。
(もっと読む)
電動パーキングブレーキシステム
【目的】新しい摩擦材についての摺合わせ制御が行われた後、自動で、摺合わせ制御が必要であるか否かが検出され、自動で、摺合わせ制御が行われるようにする。
【解決手段】動的パーキングブレーキが作動させられたか否か、イグニッションスイッチのON操作回数が設定回数に達したか否か、イグニッションスイッチのOFF状態が設定時間以上継続したか否かが検出される。これらのうちの少なくとも1つが満たされた場合には、効き変動条件が満たされたとされる。そして、効き変動条件が満たされ(S2)、かつ、パーキングスイッチ210のリリース指示操作が行われた場合(S1)には、押付力が摺合わせ制御に適した大きさまで小さくされて(S4)、摺合わせ制御が行われる。運転者が、スイッチ操作をしなくても、必要である場合に、摺合わせが行われるため、燃費が悪くなることを回避しつつ、効きの変動が生じることを回避することができる。
(もっと読む)
ブレーキホールド制御装置
【課題】ブレーキホールド制御装置において、アクセル開度センサの故障等の異常時に、運転者が予期しない車両の挙動変化を有効に防止することである。
【解決手段】車両の制動力を保持するブレーキホールド用電磁バルブを備えるブレーキアクチュエータ32と、アクセル開度を検出する制御用、異常検出用2個のアクセル開度センサ20,22と、2個のアクセル開度センサ20,22からの検出信号が入力されるブレーキECU24とを備える。ブレーキECU24は、ブレーキホールド解除用アクセル開度条件を含む所定のブレーキホールド解除条件が満たされた場合に制動力を解除させる。ブレーキホールド解除用アクセル開度条件は、2個のアクセル開度センサ20,22の両方からの検出信号に対応するアクセル開度AP1,AP2のいずれもが所定の開度よりも大きいこととする。
(もっと読む)
車両用ブレーキ制御装置
【課題】アンチロック制御を行う車両用ブレーキ制御装置において、μスプリット路面での車両の挙動を安定化させる。
【解決手段】運転者がブレーキ操作をしたことを判定するブレーキ操作判定部と、緩増圧レートより増加勾配が大きい急増圧レートを設定する急増圧レート設定部と、を備え、ヨーコントロール制御部は、ブレーキ操作判定部においてブレーキ操作されたと判定された時点で、高μ側の車輪の車輪ブレーキを緩増圧制御するヨーコントロール制御をすでに実行している場合に、ブレーキ操作判定部によってブレーキ操作されたと判定された以降、急増圧レート設定部によって設定された急増圧レートに従って高μ側の車輪のブレーキを制御することを特徴とする。
(もっと読む)
車両の走行安全装置
【課題】路面状態設定の適正化を促す。
【解決手段】道路データ記憶部11と、自車位置検出部12と、自車両の車両状態を検出する車両状態検出部13と、自車両の進行方向に存在するカーブを認識するカーブ認識部15と、運転者により路面状態を設定可能な路面状態設定部23と、カーブ認識部が認識したカーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、車両状態検出部13が検出した車両状態と適正車両状態設定部16が設定した適正車両状態とを比較する比較部17と、比較部17の比較結果に基づいて自車両が適正車両状態にないときに安全装置19を作動させる作動部18と、を備える車両の走行安全装置10であって、路面状態設定部23で設定された路面状態が適切であるか否か判定する路面状態判定部24を備え、路面状態判定部24により路面状態の設定が適切でないと判定された場合には、運転者へ報知する。
(もっと読む)
車両のブレーキシステムの電気的制御のための方法および装置
【課題】車両のブレーキ過程により、ブレーキ作用の開始に対する値(作動圧力)と少なくとも1つの車軸に対するブレーキ特性値とが決定可能な方法を提供する。
【解決手段】 車両のブレーキ装置の電子式制御方法および装置において、ホイールブレーキ内のブレーキ力をドライバーの指令に応じて引き上げる際、ブレーキ力引き上げの始まりと共にブレーキ作用の始まりが把捉され、ブレーキ作用の始まりの際に少なくとも一つの作動値が把捉され、更なるブレーキ力の引き上げの際に少なくとも一つのホイールブレーキ或いはアクスル(車軸)のブレーキ特性値がこの少なくとも一つの作動値に応じて求められる。
(もっと読む)
車速制御装置
【課題】車両が停止した後のパーキングブレーキを確実に動作させて車両の誤走行を防止する。
【解決手段】車両の速度を検出する車速センサ4,5と、ブレーキを動作させるブレーキペダル2と、車両駆動源の出力を調整するアクセルペダル1と、ブレーキモータ20と、パーキングブレーキ10とを有する。アクセルペダル1とブレーキペダル2がオフであり、かつ車両速度が所定速度より遅い場合に前記ブレーキモータ20を駆動して車両を停止させた後、前記パーキングブレーキ10を自動で動作させる制御回路(CPU3)を有する。
(もっと読む)
車両の駆動車輪の改善された横すべり防止装置、およびその実施方法
車両、特に自動車の駆動車輪の横滑り防止装置であり、−駆動車輪(10)のブレーキ装置(16)、−決められた制御指示に対して、制御値との差異(Δv)の情報を関数として、ブレーキ装置(16)に指令信号(Cf)を送るトルクレギュレーター(12)、−制御開始(In)の情報をトルクレギュレーター(12)に送る指令装置(20)、でなっている。指令装置(20)は、駆動車輪の接地力と速度、地面の坂および/または横傾斜など、全ての地面での車両発進のパラメーターに基づいて制御開始(In)の情報を送る手段を有している。適用は、自動車の車輪の横滑り防止装置である。 (もっと読む)
トラクタにおけるトレーラ運転の検出方法および制御装置
【課題】トラクタがトレーラ運転内に存在しているかどうかを確実に検出可能な、特に走行動特性制御方法の一部としての、改善されたトラクタにおけるトレーラ運転の検出方法を提供する
【解決手段】 本発明は、特にトラクタおよびトレーラからなる連結車を安定化させるためのトレーラ横揺れ論理を有する走行動特性制御装置の一部としての、トラクタにおけるトレーラ運転の検出方法並びに方法を実行するための制御装置において、トレーラ運転の検出が、走行状態を表わす実際信号と、対応の目標信号との比較により行われるように設計される。
(もっと読む)
ブレーキ装置内に設定可能な終端圧力を再現可能に発生させるための方法および装置
ブレーキ回路の少なくとも1つ部分内に設定可能したがって再現可能な終端圧力を達成させるために、はじめに、弁(18)が閉鎖されているとき、圧力を上昇ないしは低下させるためにポンプ(26)が操作される。第1の所定の目標圧力が到達されたとき、ないしは圧力しきい値が超えられたとき、前記弁(18)は第1の操作により開放位置に移動される。本発明により、ポンプ(26)が遮断されたのちに、前記弁(18)の操作は、設定可能な時間の間、第1の操作から第2の操作への連続的な変化が行われ、この変化において、特に弁(18)にかかっている圧力差を考慮しながら弁(18)が保持位置をとるように、前記弁(18)の操作が修正される。 (もっと読む)
車両運転補助方法および改良型関連装置
本発明は、対象物感知検出器を備え、以下のステップを含む車両運転補助方法に関する。これらステップは、検出対象物の運動学的パラメータのフィールドのN個のセルへの分割化に対応する占有グリッドを定義するステップと、各時間kで検出器によって生成された観測値zkを取得し、その挙動をモデル化する検出器確率を決定するステップと、先行する時間でのグリッドの推定占有密度を認識し、セルXが時間kで占有状態である確率をもたらす予測占有確率を各セルXに対して計算するステップと、検出器確率および予測占有確率を用意して推定占有確率を各セルXに対して計算するステップであって、時間kで予測占有確率がグリッドの単一のセルが時間k−1で関与するセルXに先行するセルを構成すると仮定して決定されるステップと、各セルXに対して時間kでの推定確率に基づいて衝突確率を評価するステップと、対象物を回避するために信号を発信するステップとを含む。 (もっと読む)
連続する制動の認知により緊急制動を検出する方法
本発明は、制動システム(10)に導入可能なブレーキサーボユニットを備える自動車の制動制御方法に関し、この制動システム(10)は、真空ブレーキブースター(18)及び油圧回路(A、B)に接続する油圧マスターシリンダーであって、この車両の車輪に装備される車輪ブレーキ(12A、14A、12B、14B)に供給する油圧マスターシリンダー、車輪横滑り防止機能を有するABS油圧ユニット(22A、22B)、油圧ユニット(22A、22B)によって補助される緊急制動を実行する電子手段(24)を備える。この方法は、緊急制動操作を実行するために一定の時間内に反復を検出すること、連続して反復する場合に緊急制動を実行するための条件を適用することを特徴とする。 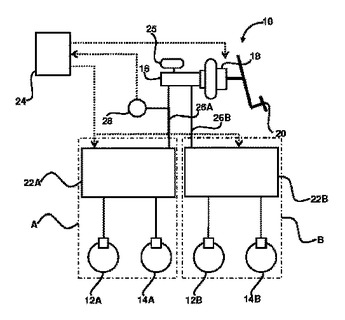 (もっと読む)
(もっと読む)
181 - 194 / 194
[ Back to top ]