
Fターム[3D246HA48]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 時間 (194)
Fターム[3D246HA48]に分類される特許
41 - 60 / 194
ブレーキ制御装置およびブレーキ制御方法
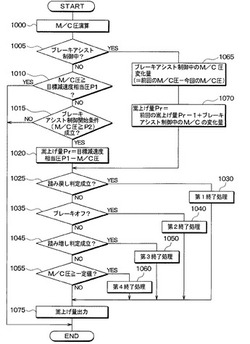
【課題】ドライバがブレーキアシスト制御を解除するという意思がないにも拘わらず、ブレーキペダル踏み込み量の変化に伴って目標減速度が得られなくなることを防止する。
【解決手段】ブレーキアシスト制御中に、ドライバがブレーキアシスト制御を解除するという意思がなければ、W/C圧を目標減速度相当圧P1に一定に維持する。具体的には、踏み戻し判定やブレーキオフ状態、もしくは、踏み増し判定などが為されなければ、M/C圧の変動分をキャンセルできるように嵩上げ量Prを設定することで、ブレーキアシスト制御中はW/C圧を目標減速度相当圧P1にする。そして、踏み増し判定にてブレーキペダルの踏み増しが判定されると、嵩上げ量をブレーキオフ時と比べて勾配を大きくして減少させる。
(もっと読む)
車両の横方向運動制御装置

【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
情報処理装置
【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】摩擦締結要素のスリップ制御中にブレーキ操作があった場合に、協調回生制御トルクの増加を禁止することにより、意図しないスリップによるショックの発生を防止可能なハイブリッド車両の制御装置を提供する。
【解決手段】エンジンEngに第1摩擦締結要素CL1を介して締結されたモータジェネレータMGと、モータジェネレータMGと駆動輪との間に介装された摩擦締結要素CL2を含む有段の自動変速機ATと、メカニカルブレーキ操作に基づくブレーキコントローラ9からの目標ブレーキトルクBSと車速情報に基づく最大回生トルクとの差分から目標回生トルクを算出して協調回生制御を実行する協調回生制御実行手段10とを備えている。
協調回生制御実行手段10は、メカニカルブレーキ操作による目標ブレーキトルクBSの増加の判断と第2摩擦締結要素CL2がスリップ中であるか否かを判断する判断部M11と、目標ブレーキトルクBSの増加時でかつ摩擦締結要素CL2のスリップ中に回生トルクの増加を禁止する回生トルク増加禁止手段M11とを有する。
(もっと読む)
作業車両
【課題】タイヤまたはクローラの回転状態に起因する振動を抑制する。
【解決手段】エンジン2からの回転動力を受けて駆動される無段変速装置31と、無段変速装置31によって駆動される左右一対の後輪6・6と、後輪6・6を左右独立して制動するブレーキ装置73・74と、ブレーキ装置73・74を制御可能とする制御装置9と、を具備するホイル式トラクタ100であって、作業車両本体の振動加速度を検出する振動センサ91をさらに具備し、制御装置9は、振動センサ91により取得した振動加速度が所定の値よりも大きい場合に左右一対の後輪6・6の回転位相差が小さい状態であると判断し、ブレーキ装置73・74を制御して左右いずれか一方の後輪6に制動力を加えるものとした。
(もっと読む)
車両用制動制御装置
【課題】本発明は、精度良くブレーキペダルストロークセンサのゼロ値を示す基準値の補正を行うことのできる車両用制動制御装置を提供する。
【解決手段】初期学習許可判定にて初期学習開始条件が成立し、更にイグニッションスイッチがON後(i)に初期学習開始条件が成立すると初期学習を開始する(ii)。初期学習を継続し、ブレーキペダルストロークセンサの基準値がブレーキペダルのゼロ点の初期学習終了範囲内となるまで初期学習を行う(iii)。また、ブレーキペダルストロークセンサの基準値が初期学習終了範囲内で初期学習時間維持されると初期学習を終了する(iv)。正規学習開始条件が成立し、正規学習開始条件が成立すると正規学習を行う(v)。
(もっと読む)
車両運動制御装置
【課題】車両の走行状態に適した運動制御を、より容易に行うことのできる車両運動制御装置を提供すること。
【解決手段】車両運動制御装置2に、車両1のタイヤ温度を取得するタイヤ温度取得部50と、車両1の運動を制御する運動制御部54と、を備え、運動制御部54は、車両1の走行状態に応じて、タイヤ温度取得部50で取得したタイヤ温度に基づく運動制御と、予め定められた所定値に基づく運動制御とを切替える。これにより、タイヤ温度に基づいて運動制御を行う場合には、走行時に変化するタイヤ温度に基づいて制御することにより適切な制御を行うことができ、所定値に基づいて運動制御を行う場合には、演算時間の短縮を図ったり、ECU40の負荷を低減したりすることができる。この結果、車両1の走行状態に適した運動制御を、より容易に行うことができる。
(もっと読む)
車両制御システム、車両制御装置、及び、車両制御方法
【課題】隣接車線から接近する物体に対する車両制御を行う技術を提供する。
【解決手段】車両の走行する車線に存在する物体を制御対象として物体と車両との車両進行方向の距離を一定の距離に保つように車両を制御して、車両が走行する車線と車線に隣接する隣接車線との境界を検出する。そして、車両の前方に存在する物体を検出し、車両が制御されている場合に検出された物体が境界を含む境界近傍の領域に存在するときは、物体を前記制御対象に含む処理を行う。これにより、車両が自車線を走行する物体を制御対象としている場合に、境界を含む境界近傍の領域に存在する物体と車両との衝突の危険性をなくすことができる。
(もっと読む)
衝突被害軽減装置
【課題】車両が障害物に衝突するおそれがある場合にブレーキを自動的に作動させる衝突被害軽減装置の作動精度を向上すること。
【解決手段】車両1が進行方向上の障害物に衝突するおそれがあると判定した場合に、車両1のブレーキ2を自動的に作動させる衝突被害軽減装置100であって、車両1の進行方向の画像を撮像するカメラ10と、カメラ10によって撮像され画像から車両1が走行車線を逸脱するか否かを判定する車線逸脱判定部42とを備え、車線逸脱判定部42によって車両1が走行車線を逸脱すると判定された場合には、ブレーキ2の自動的な作動を停止することを特徴とする。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】運転者がブレーキペダルの操作量を急速に減少させた際に、運転者へ与える違和感を低減することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】運転者によるブレーキペダルの非操作時に第一連通路を介してリザーブタンクと連通するマスタシリンダと第二連通路を介して連通し、車輪に制動力を付与するホイールシリンダの液圧を、ブレーキペダルの操作量に応じてマスタシリンダで発生するマスタシリンダ圧以上の液圧に増圧し、ブレーキペダルの操作量が、予め設定した操作量閾値以上から操作量閾値未満に減少すると、マスタシリンダ圧以上の液圧に増圧した液圧に対する増圧量を減少させ、且つブレーキペダルの戻し方向への操作速度が予め設定した操作速度閾値以上の場合に、操作速度が操作速度閾値未満の場合よりも、第二連通路を流れるブレーキ液の流量を減少させる。
(もっと読む)
コンピュータプログラム及び数値計算装置
【課題】分布定数系の微分方程式を少ない演算量で解けるようにする。
【解決手段】全ての計算時刻について値が与えられる第1の変数と、初期値のみが与えられる第2の変数とで定義される被積分関数に関する積分演算をコンピュータで実行し、各計算時刻で使用する前記第2の変数の値を算出するために、以下の処理を実行する。まず、被積分関数を第2の変数について偏微分して求めた偏導関数を記憶装置から読み出す。各計算時刻では、初期値又は直前回の計算時刻に算出された第2の変数の値と、現計算時刻に与えられる第1の変数の値を、被積分関数と偏導関数にそれぞれ代入して現計算時刻における被積分関数の値と偏導関数の値をそれぞれ算出する。この後、算出された被積分関数の値を初期値とし、かつ、当該被積分関数の値に偏導関数の値を乗算して算出された値を傾きとする指数関数を用い、次回計算時刻に使用する第2の変数の値を算出する。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
ブレーキ制御システム
【課題】 鋳鉄製のブレーキシューを用いたブレーキ装置であっても、非常ブレーキ動作時に減速度が大きくなってしまうことを防止することができ、安全性を高めることのできるブレーキ制御システムを提供する。
【解決手段】 列車1に搭載され車輪3の制動を行うためのブレーキ装置4と、ブレーキ装置4を駆動制御するためのブレーキ制御装置5と、非常ブレーキ時に動作されブレーキ制御装置5に非常ブレーキ動作信号を出力する非常ブレーキ装置9とを備えてなり、ブレーキ制御装置5により、非常ブレーキ装置9から非常ブレーキ動作信号が入力された場合に、ブレーキ装置4による列車1の減速度が大きくなる前に、エア圧力を調整させてブレーキ力を弱くするように制御する。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】自車両周囲の障害物に対する運転者の運転支援をより適切に実施可能な車両制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物側への自車両の移動抑制を支援する運転支援制御を行う。この際に、運転者が自車両の運転を開始したと判定してから予め設定した抑制時間の間、上記運転支援制御を抑制する。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
走行制御装置
【課題】自車両と直前車両との車間距離を正確に制御することができる走行制御装置を提供する。
【解決手段】走行制御装置は、車間距離を短くする要求があった場合に、隊列の先頭車両が一定の加速度以上で加速中または加速予定であるときは、自車両と直前車両との車間距離を短くする制御を開始せずに待機し、先頭車両が一定の加速度以上で加速中または加速予定でないときは、自車両と直前車両との車間距離を短くする制御を開始する。また、走行制御装置は、車間距離を長くする要求があった場合に、隊列の先頭車両が一定の減速度以下で減速中または減速予定であるときは、自車両と直前車両との車間距離を長くする制御を開始せずに待機し、先頭車両が一定の減速度以下で減速中または減速予定でないときは、自車両と直前車両との車間距離を長くする制御を開始する。
(もっと読む)
ヒルスタートアシスト制御装置及びその制御方法
【課題】登坂路停車時において消費電力を抑えつつも車両の後退を防止することが可能なヒルスタートアシスト制御装置及びその制御方法を提供する。
【解決手段】ヒルスタートアシスト制御装置1は、登坂路停車時にブレーキペダルが戻されてもブレーキが掛かったままの状態で保持するものである。このヒルスタートアシスト制御装置1は、モータから発生するクリープトルクを低減させるクリープカット制御部25を備え、このクリープカット制御部25は、登坂路停車時にブレーキが戻された場合に、登坂路の路面勾配と戻される前のブレーキ力とに基づいて、クリープトルクの低減量を算出し、算出された低減量に基づいてクリープトルクを設定する。
(もっと読む)
車両走行制御方法
【課題】走行中の車両の有する運動エネルギーを最大限に活用した車両走行制御方法。
【解決手段】車両走行区間を、起点および終点を各々信号交差点あるいは一時停止点とする単位走行制御区間に分割する。前記単位走行制御区間毎に、起点からの加速走行・定速走行を行いその後の終点に向けての走行は終点到達条件を満足する範囲内で前記加速走行・定速走行後に車両の有している運動エネルギーを最大限有効利用した惰性走行を行う。また、前記惰性走行時の車両の惰性走行減速度は、惰性走行中の一定時間あるいは一定走行距離毎に算出し以降それが更新されるまでの間の惰性走行可否の判定に利用する。
(もっと読む)
41 - 60 / 194
[ Back to top ]