
Fターム[3D246HA93]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体加減速度 (1,415)
Fターム[3D246HA93]の下位に属するFターム
Fターム[3D246HA93]に分類される特許
121 - 140 / 217
アイドリングストップ車両の制御装置
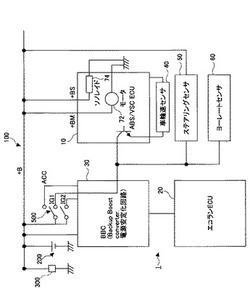
【課題】規定車速までに異常判定を完了させることが可能なアイドリングストップ車両の制御装置の提供。
【解決手段】本発明は、アイドリングストップ車両の制御装置1において、電源からブレーキ制御関連電子部品へ供給される電圧の安定化を行うように構成された電圧安定化手段0と、規定車速に達するまでに前記ブレーキ制御関連電子部品の異常判定を行うように構成された異常判定手段10と、前記エンジンの停止状態で車両が移動した場合に前記エンジンの始動を行うように構成されたエンジン始動制御手段20とを備え、前記電圧安定化手段は、前記異常判定手段による前記異常判定が可能となるように、少なくとも前記エンジン始動が行われている間、動作することを特徴とする。
(もっと読む)
電子制御ユニット及び車両挙動制御装置

【課題】センサ基板及び制御基板が収容されるハウジングを小型化することができ、全体をコンパクトに構成することができる電子制御ユニットを提供することを課題とする。
【解決手段】電子制御ユニット10であって、センサ33,34が取り付けられたセンサ基板30と、センサ33,34で検出された物理量に基づいて、電気部品の作動を制御する制御基板20と、センサ基板30及び制御基板20が収容されるハウジング40と、を備え、ハウジング40の内部空間には、電気部品を収容する第一収容室41と、センサ33,34を収容するセンサ収容部70と、が形成されるとともに、モータ200(電動部品)に給電するためのターミナルT(接続端子)が収容され、第一収容室41とセンサ収容部70とは、導電性を有する遮蔽部材72によって仕切られており、遮蔽部材72とモータ200とは、ターミナルTを介して電気的に接続されている。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作状態との協調を図りながら、車両の安定走行のために車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1以下である場合、制動装置12の動作が優先的に補正された上で必要に応じて操舵装置11の動作が補足的に補正される。その一方、運転者による車両1の過去第1期間にわたる運転操作度合Dd1が第1閾値TH_Dd1を超えている場合、操舵装置11の動作が優先的に補正された上で、必要に応じて制動装置12の動作が補足的に補正される。
(もっと読む)
車両走行支援装置
【課題】複数の物体検知装置のそれぞれにより検知された物体の一体不可分性の有無の判定精度の向上を図ることができる装置を提供する。
【解決手段】本発明の車両走行支援装置10によれば、今回物体の測定位置pi(k)および前回物体の予測位置pi^(k)の間隔Δ1が第1基準間隔以下であるか否かに応じて当該今回物体および前回物体が同一物体であるか否かが判定される。また、第1および第2検知領域の重なり領域に一部または全部が含まれる第1および第2の今回物体の間隔Δ2が第2基準間隔以下であるか否かに応じて当該第1および第2の今回物体が一体不可分の物体であるか否かが判定される。第2基準間隔は第1基準間隔より長く設定されているため、この重なり領域A3に含まれている第1および第2の今回物体が一体不可分の物体であると判定される条件がその分だけ緩められている。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
ブレーキ制御装置
【課題】 ポンプの吐出圧の脈動を低減し、良好なペダルフィーリングを実現できるブレーキ制御装置を提供すること。
【解決手段】 車両の状態に応じて、吸入路30から吸入したブレーキ液を吐出路24に吐出してブレーキ制御を行うポンプ12を備えたブレーキ制御装置において、吐出路24に吐出側へのブレーキ液の流れのみを許容するチェック弁16を設け、チェック弁16とポンプ12の吐出部との間と吸入路30を連通する連通路22を設けるとともに、連通路22にポンプ負荷制御弁11を設けた。
(もっと読む)
車両制御装置
【課題】運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止する。
【解決手段】制御部4が、車両1よりも障害物側に設定された目標停止位置まで後退して停止する後退制御処理を、車両1から障害物までの距離が最終目標停止距離以下となるまで繰り返し実行することにより、障害物に対し車両1を段階的に後退させる。これにより、従来の車両制御装置のように、運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止できる。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が走行している道路の走行優先度よりも高い走行優先度を有する道路を走行している接近車両(優先接近車両)が存在する場合、制御部4が、車両1が停止した場合に優先接近車両が通過可能であるか否かを判定する。そして優先接近車両が通過可能であるとと判定した場合、制御部4は、報知・制動制御が効果的であると判断して報知・制動制御を実行し、逆に優先接近車両が通過不可能であると判定した場合には、報知・制動制御が効果的でないと判断して報知・制動制御を実行しない。これにより、報知・制動を有効的に実行させることが可能となり、結果として、報知・制動制御に対して運転者が煩わしさや違和感を感じることを抑制できる。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が後退動作中である場合、制御部4が、車両1の進行方向と接近車両が走行している道路の延在方向とがなす角度に応じて制動制御作動距離を設定する。これにより、車両1後方に接近車両が通過可能なスペースがなく、運転者が後退操作を早く終了させることを望んでいる可能性が高いシーンでは遅いタイミングで制動制御が行われるようになるので、制動制御に対して運転者が感じる煩わしさや違和感を低減させることができる。
(もっと読む)
降坂路走行速度制御装置および降坂路走行速度制御方法
【課題】 運転者の所望する車速と実際の車速との乖離を抑制できる降坂路走行速度制御装置および降坂路走行速度制御方法を提供する。
【解決手段】 降坂路走行中の車両を目標車速V*に基づいて自動制動しつつ、アクセル操作に応じて車速Vを上昇させるHDCコントローラ1と、アクセル操作に応じて目標車速V*を変更する目標車速演算部23と、を有する降坂路走行速度制御装置において、HDCコントローラ1は、運転者がアクセルを踏み戻している間、踏み戻し直前の車速Vを維持する。
(もっと読む)
自動車の回生制動方法
自動車の回生制動方法であって、回生制動作用が、漸進的に適用され、制動作用の適用の速度が、自動車の速度に依存することを特徴とする、制動方法。  (もっと読む)
(もっと読む)
補助制動装置
【課題】緊急時に大きな制動力を効果的に得る。
【解決手段】
緊急制動判定装置16により緊急制動が必要である判定された場合、制動部材12内の火薬の爆発によって制動部材12が拡大し、下側が道路に接触することによって制動力が発生する。また、押しつけ制御機構により制動部材を上下に移動することで、道路への押しつけ力を制御する。従って、緊急時に、火薬の爆発による制動部材の拡大および押しつけ制御機構による押しつけ力によって制動力を得ることができる。
(もっと読む)
電子制御ユニット及び車両挙動制御装置
【課題】センサ基板及び制御基板が収容されるハウジングを小型化することができ、全体をコンパクトに構成することができる電子制御ユニットを提供することを課題とする。
【解決手段】電子制御ユニット10´であって、センサ33,34が取り付けられたセンサ基板30と、センサ33,34で検出された物理量に基づいて、電気部品の作動を制御する制御基板20と、センサ基板30及び制御基板20が収容されるハウジング40と、を備え、ハウジング40には、電気部品を収容する第一収容室41と、センサ基板30及び制御基板20を階層状態で収容する第二収容室42と、第一収容室41と第二収容室42とを仕切る仕切部44と、が形成され、仕切部44には、第二収容室42に開口した凹部81が形成され、凹部81を利用して、センサ33,34の収容空間であるセンサ収容部80が形成されている。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】特定の目標車速で走行することが望まれる特定の区間が連続する道路において、特定の区間の間でスムーズな加減速を支援することができなかった。
【解決手段】自車両の前方の第1区間以降の第1加速区間にて前記自車両を加速させるための第1加速変速比と、前記第1区間の前方の第2区間以降の第2加速区間にて前記自車両を加速させるための第2加速変速比と、を取得し、前記第1区間以前の前記自車両を減速させるための第1減速区間にて前記自車両の変速比を前記第1加速変速比に設定させる制御を行い、前記自車両が前記第1加速変速比にて走行している過程で前記第2区間に対する減速が必要となったときに、前記自車両の変速比を前記第2加速変速比に設定させる制御を行う。
(もっと読む)
4輪駆動車両の制御システムおよび制御方法
各車軸に少なくとも1つのパワートレインを備える4輪駆動ハイブリッド車両において、第1のパワートレイン(1)が少なくとも1つの熱機関を含み、第2のパワートレイン(2)が少なくとも1つの電気機械を含む。制御システムは、摩擦ブレーキシステムと、1つのパワートレインの少なくとも1つの電気機械であって抵抗トルクを与えることができる電気機械との間でブレーキ要求を振り分ける配分手段(9)、センサからの信号に応じてブレーキシステムとパワートレインを出力先とするトルク設定値変調手段(10)、ならびにパワートレインの制御手段(8)を含み、該配分手段(9)、該トルク設定値変調手段(10)およびパワートレインの該制御手段(8)が動的に相互に作用することができ、それによって車両の安定に有利となるようにパワートレインおよび摩擦ブレーキシステムに対してトルク命令を送出する。 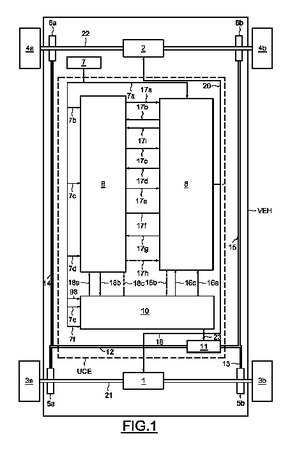 (もっと読む)
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が滑り易い道路を発進する場合を想定し、走行路に対する車両移動を検出して運転者の操舵操作を補助できる車両停止保持装置を提案する。
【解決手段】ブレーキペダルBPの踏込の操作後、当該踏込操作が解除されたときに車輪への制動力を保持可能とする制動力保持手段WC、CONTを有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段WSS、CONTと、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応動する特定の車輪について前記制動力保持手段による前記制動力を減じる制御を実行する制動力低減手段CONTとを備える。運転者によるステアリング操作をアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに有効に対処できる。
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が、滑り易い道路を発進する場合を想定し、運転者の操舵操作を補助して車両姿勢の立直しを確実に図ることを可能とした車両停止保持装置を提案する。
【解決手段】ブレーキペダルの踏込の操作後、当該踏込操作が解除されたときに車輪の制動力を保持可能とする制動力保持手段を有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段と、前記車両の操舵角を検出する操舵角検出手段を含み、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応じて車両のヨー挙動を制御するヨー挙動制御手段とを備える。運転者によるステアリング操作を積極的にアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに対して有効に対処しながら車両姿勢を修正できる。
(もっと読む)
自動車用車輪浮上がりおよび接地の確認
【課題】車輌の転覆を制御するために、車輌制御システムから利用できるセンサを使って車輪の路面からの浮上がり状態を確実に確認するためのシステムおよび方法を提供すること。
【解決手段】車輌10用のシステム18は、種々のセンサから情報を受け、第1横揺れ状態検出器64A、第2横揺れ状態検出器64B、第3横揺れ状態検出器64C、およびこれらの検出器が発生した横揺れ状態に応じて車輪浮き上がり状態を決定する横揺れ安定性制御コントローラ26を含み、その出力で安全装置44を作動させる。このシステムを設けることによって、車輪浮上がりの効果的決定が行え、適切なブレーキおよび操向回避行動がとれる結果となる。
(もっと読む)
車両の制御装置
【課題】車両のドライバビリティを低下させることなく、バウンシングおよびピッチングを適切に抑制することのできる車両の制御装置を提供する。
【解決手段】車体のピッチングもしくはバウンシングの状態に応じて、それらピッチングもしくはバウンシングを抑制するために算出される駆動力配分比に基づいて駆動力発生機構により前後輪に駆動力もしくは制動力を発生させる車両の制御装置において、駆動力配分比に基づいて前後輪のいずれか一方に発生させる駆動力もしくは制動力が0近傍となる場合に、駆動力発生機構とは別のブレーキ機構を制御して一方の車輪に所定の制動力を発生させるとともに、その所定の制動力を打ち消す駆動力を、当初の0近傍の駆動力もしくは制動力に加えて、駆動力発生機構を制御して一方の車輪に発生させる駆動力変更手段(ステップS5〜S7)を設けた。
(もっと読む)
車両用制御装置及び車両
【課題】坂路での車両停止中においてブレーキ機構に与える作動力を保持している間に、上側車輪と路面との間にサイドフォースを十分に発生させることが可能な車両用の制御技術を提供する。
【解決手段】車両1は、ホイールシリンダ16に液圧を受けて作動して車輪9f,9rの回転を制動可能な摩擦ブレーキ11f,11rが設けられ、ホイールシリンダ圧を、摩擦ブレーキ11f,11rごとに予め設定された設定値に保持可能なブレーキアクチュエータ30と、ブレーキアクチュエータ30を制御して、各ホイールシリンダ圧をそれぞれ保持する作動力保持制御を行うことが可能なECU100とを有している。ECU100は、摩擦係数が低いと判定した場合には、車両停止中において鉛直上側に位置する上側車輪9fの回転を制動する摩擦ブレーキ11fのホイールシリンダ圧を、他の摩擦ブレーキ11rのホイールシリンダ圧に比べて低減させた状態で保持する。
(もっと読む)
121 - 140 / 217
[ Back to top ]