
Fターム[3D246HA93]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体加減速度 (1,415)
Fターム[3D246HA93]の下位に属するFターム
Fターム[3D246HA93]に分類される特許
81 - 100 / 217
電子制御ユニットおよび車両用ブレーキ液圧制御装置
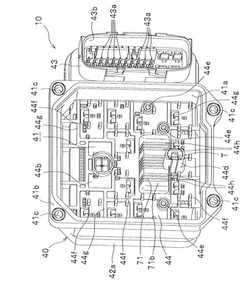
【課題】ハウジング内に収容されたセンサに伝わる振動を低減することができ、センサの検出精度を高めることができる電子制御ユニットを提供することを課題とする。
【解決手段】電子制御ユニット10であって、センサが取り付けられたセンサ基板と、電気部品の作動を制御する制御基板と、センサ基板および制御基板が収容されるハウジング40と、を備え、ハウジング40の内部空間には、電気部品が収容される第一収容室41と、センサ基板および制御基板が階層状態で収容される第二収容室と、第一収容室と第二収容室とを仕切る仕切部44と、が形成されており、センサ基板および制御基板は仕切部44に支持され、仕切部44にはリブ44gが突設されている。
(もっと読む)
ブレーキ制御装置

【課題】回生制動力と液圧制動力とを併用して車輪に制動力を付与するブレーキ制御装置において、燃費性能の向上を図るとともに液圧制動力を確保する。
【解決手段】ブレーキ制御装置は、ブレーキ回生協調制御を実行可能なブレーキ制御装置であって、電動モータの回生制御により回生制動力を発生させる回生ブレーキユニットと、液圧制動力を発生させる液圧ブレーキユニットと、内燃機関の動力を用いて発電する発電部と、電動モータの回生制御により得られる電力と発電部の発電により得られる電力とを蓄えるとともに、液圧ブレーキユニットに電力を供給する電源部と、発電部による発電量を制御する制御部と、を備える。制御部は、電動モータの回生制御により得られる電力が所定のしきい値未満となる場合に、発電部の発電量を、通常時の発電量よりも大きくする。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
同軸二輪車
【課題】少ない駆動モータで、しかも簡単な構成で左右の車輪に回転差を生じさせることができるデファレンシャルデアを用いた同軸二輪車を提供する。
【解決手段】本発明に係る同軸二輪車は、車体10と、車体10に支持される搭乗ステップ20と、第1の駆動モータ31と、第1の駆動モータ31から駆動力が伝達されるデファレンシャルギア32と、デファレンシャルギア32から駆動力が伝達される車軸33と、車軸33に連結され、同軸上に配置される一対の車輪34と、一対の車輪34に回転差を生じさせる差動発生部35と、一対の車輪34の駆動を制御して車体10の姿勢制御を行う制御部40と、を備える。差動発生部35は、搭乗ステップ20の左右方向への回転角度に基づいて、車輪34の回転を制御するブレーキ機構である。
(もっと読む)
走行支援装置
【課題】運転者の操作によって推奨速度への速度調整を容易に実施できる走行支援装置を提供することを課題とする。
【解決手段】運転者の操作に応じて自車両の速度を調整可能な自車速調整手段を備える車両に搭載される走行支援装置1であって、自車両の推奨速度を取得する推奨速度取得手段51と、自車両の速度を検出する自車速検出手段12,22と、推奨速度と自車両の速度との偏差に応じて自車速調整手段の操作特性を変更する操作特性変更手段51とを備えることを特徴とし、操作特性変更手段51は、推奨速度と自車両の速度との偏差が大きいほど、自車両の速度が推奨速度に一致する方向に速度変化し易くなるように自車速調整手段の操作特性を変更すると好適である。
(もっと読む)
車両の走行安全装置
【課題】交差点を適切に検出して交差点での自車両の所望の走行安全性を確保する。
【解決手段】車両の走行安全装置10は、自車両の前方部に設けられて自車両の左右方向の外界を撮像して得た画像を出力する第1カメラ21および第2カメラ22と、各カメラ21,22から出力された画像データに基づいて、路面上端の線分を平面境界線として抽出する境界線抽出部34と、路面および路面上の構造物が存在しない空の領域を抽出し、空の領域から最も平面境界線に近接する近接点を抽出する近接点抽出部35と、平面境界線と近接点との距離を算出する距離算出部36と、平面境界線と近接点との距離が所定距離以下である場合に、自車両が交差点に直面する地点に位置していると判定する交差点判定部37とを備える。
(もっと読む)
車両の走行安全装置
【課題】自車両と他車両との衝突可能性の有無を精度良く判定する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の進路と交差する進行方向で自車両に接近するように移動する接近交差車両を検出する交差車両検出部32と、接近交差車両の進行方向に基づいて、接近交差車両の進路を予測する交差車進路予測部33と、自車両の進路と接近交差車両の進路とに基づいて、自車両と接近交差車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両が位置する地点において該自車両によって認識される接近交差車両の側面長さLBを検出する側面長さ検出部34と、側面長さLBの時間的な変化に基づいて、接近交差車両の進路を補正する交差車進路補正部38とを備え、衝突可能性判定部40は、補正された接近交差車両の進路に基づいて衝突可能性の有無を判定する。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
車両制御装置
【課題】誤操作によってアクセルペダルが戻された場合であってもスムーズな発進を可能とする車両制御装置を提供する。
【解決手段】電動パーキングブレーキ装置の解除条件が成立しているか否かを判定する解除条件判定手段と、車両が停止している路面の傾斜を検出する傾斜検出手段と、前記路面の傾斜角度に応じた推定走行抵抗を算出する推定抵抗算出手段と、車両の駆動力を算出する駆動力算出手段と、アクセルペダルからの入力に基づいてエンジンの出力を制御するエンジン出力制御手段とを備える車両制御装置であって、エンジン出力制御手段は、解除条件判定手段により電動パーキングブレーキの解除条件成立が判定されかつ駆動力が推定走行抵抗以上となった後に、アクセルペダルからの入力に関わらずエンジンの回転数が所定の下限エンジン回転数以上となるようにエンジンの出力をフィードバック制御する構成とする。
(もっと読む)
車両の制御システム
【課題】 モータ回路の過熱保護のために操舵アシストを制限する必要があるときには、運転者に対して電動モータ20が過負荷となるような操舵操作を抑制させる。
【解決手段】 モータ温度Tが第1基準温度T1を越えた場合に、報知器54,55の報知開始閾値を低減する。これにより、車両の横滑りあるいは駆動輪のスリップに対して、早めに報知器54,55が作動する。運転者は車両の走行状態が車両限界に近いものと思い、自然に運転を抑制する。モータ温度Tが第2基準温度T2(>T1)を越えた場合に、スキッド制御の制御開始閾値を低減する。これにより、車両の横滑りあるいは駆動輪のスリップに対して、早めにスキッド制御が開始され、車速が上がりにくくなり操舵速度が低下して電動モータ20の負荷が軽くなる。
(もっと読む)
車両制御装置および車両制御方法
【課題】より適切なタイミングで走行計画を見直すことができ、これにより、さらに的確な走行計画を効率的に生成することができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明の車両制御装置および車両制御方法は、車両が走行する走行計画を生成し、生成された走行計画に基づきアクチュエータを制御追従することにより、車両を走行制御する計画実現し、計画実現において、アクチュエータの制御追従が走行計画に対して不足する状況を予測した場合、当該走行計画の見直し指令を出力する。
(もっと読む)
車両用無断変速装置の制動時制御装置
【課題】車輪のロックを回避することができ、しかも、燃費を向上させることができる車両用無断変速装置の制動時制御装置を提供する。
【解決手段】ロックアップクラッチ制御手段とアンチロックブレーキ手段とを設けてある車両用無断変速装置の制動時制御装置であって、車両の左右前輪の回転速度の減速度を求め、前記減速度が設定値以上か否かを判別する判別手段を設け、
前記ロックアップクラッチ制御手段は、前記判別手段が、前記左右前輪の両方の前記減速度が設定値以上であると判別すると、その判別結果に基づいて、前記アンチロックブレーキ手段の作動状態にかかわらず、前記ロックアップクラッチを切り状態に切り換え制御する。
(もっと読む)
車両統合制御装置
【課題】車両安定性制御装置とサスペンション制御装置とを統合して、車両の走行安定性を高める。
【解決手段】オーバーステア時には、旋回外側の前輪3に制動力F1を加えて、車両1に旋回内向きのモーメントを発生させ、また、アンダーステア時には、車両1の旋回内側の後輪4に制動力F2を加えて、車両1に旋回外向きのモーメントを発生させると共に、旋回外側の前後輪3,5に適度な制動力F3,F4を加えて、車両1を減速させることによって車両1の安定性を確保する。このとき、制動力が加えられた車輪に対して、縮み側減衰力を大きくし、伸び側減衰力を小さくし、かつ、懸架ばねのばね力を小さくする。同時に、その他の車輪に対応する縮み側減衰力を小さく、伸び側減衰力を大きくする。これにより、制動力が加えられた車輪の接地荷重を大きくすることができ、車両安定性を向上させる。
(もっと読む)
摩擦円推定装置
【課題】 摩擦円の推定精度を高くすることができる摩擦円推定装置を提供すること。
【解決手段】 タイヤから車体に伝達する振動伝達特性が減衰特性となる周波数を有する同定トルクを車輪に付与するようにした。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両運動制御システム
【課題】ABS制御時にて車両の運動を安定化できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1は、ABS制御時にて車輪11RR、11RLの制動圧を減圧させたとき又は減圧後に制動圧を保持しているときに、この車輪の制動圧の増圧勾配を通常時よりも大きく設定する急増圧制御を行う。左右の車輪11RR、11RLの双方にて接地荷重低下が発生しているときには、左右の車輪11RR、11RLの双方にて急増圧制御が行われる。また、左右の車輪11RR、11RLのうちの一方の車輪11RRにて接地圧低下が発生していると共に他方の車輪11RLにて接地圧低下が発生していないときには、左右の車輪11RR、11RLの双方にて急増圧制御が禁止される。
(もっと読む)
同軸二輪車
【課題】より安全性を高めた同軸二輪車を提供すること。
【解決手段】本発明にかかる同軸二輪車10は、搭乗者が足を載せるステップ1a,1bを有し、同軸上に配置された一対の車輪2a,2bを駆動制御することにより、移動する。当該同軸二輪車10は、搭乗者の膝の屈伸状態を検出し、検出信号を出力する屈伸状態検出機構8と、検出信号に含まれる屈伸状態の情報に基づいて、減速させる減速手段として機能する制御部5やブレーキ11を備えている。
(もっと読む)
走行制御目標生成装置
【課題】安全性を確保しつつ走行時間の短縮が実現でき、車両乗員の快適性を向上させ得る走行制御目標生成装置を提供する。
【解決手段】走行制御目標生成装置1は、車両の走行状態変化速度を用いて走行制御目標を生成する。走行制御目標生成装置1は、車両の進行方向に沿った所定領域内に存在する可動障害物を検出する可動障害物検出手段と、可動障害物検出手段によって検出された可動障害物との接触が起こり得るか否かを判定する接触可否判定手段と、接触可否判定手段によって可動障害物との接触が起こり得ないと判定されたときは、接触が起こり得ると判定されたときよりも走行状態変化速度が大きくなる走行制御目標で制御する。
(もっと読む)
ブレーキ制御装置
【課題】回生制動により回収される過大なエネルギーがバッテリに与える負荷を軽減する技術を提供する。
【解決手段】ブレーキ制御装置において、回生ブレーキは、電動機による回生制動力を車両に設けられた車輪に付与する。制御装置は、車両制御のために目標となる目標総制動力を算出し、該目標総制動力を満たすように回生ブレーキにより発生させる目標回生制動力を決定するとともに該目標総制動力の不足分を満たすように液圧ブレーキにより発生させる目標液圧制動力を決定し、目標回生制動力および目標液圧制動力に応じて回生ブレーキと液圧ブレーキとを協調制御する。制御装置は、目標回生制動力が所定値より大きい場合、該目標回生制動力を低減した低減回生制動力に応じて回生ブレーキを制御する。制御装置は、低減された目標回生制動力を補うように目標液圧制動力を増大させた増大目標液圧制動力に応じて液圧ブレーキを制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
81 - 100 / 217
[ Back to top ]